模糊规则下IM换相转矩脉动控制方法仿真
2023-03-11许四平
许四平,李 琳
(1. 湖北理工学院数理学院,湖北 黄石435000;2. 武汉科技大学计算机学院,湖北 武汉435000)
1 引言
由于感应电动机在运行过程中,具备噪声较小、效率较高、可连续运转的优势,因此,三相感应电动机在工业领域的应用较为广泛,但是其在换相过程中,发生的换相转矩脉动会导致电动机发生异常噪声和振动[1],引起电动机故障,降低其使用寿命。因此,有效抑制感应电动机在换相过程中的转矩脉动,是保证其稳定运行的基础[2]。模糊控制是一种依据模糊理论完成目标控制的一种方法,其可实现复杂目标或者存在模糊参量的动态控制,其在控制过程中,无需依赖准确的数据,可通过语言模糊变量完成目标的描述[3]。
当下对于感应电动机换相转矩脉动抑制的方法较多,但是在抑制过程中,对于电机定子的铜耗较高,对电机的确定效率明显降低等问题,时常发生。因此,针对感应电动机换相转矩脉动抑制问题,已成为业内学者研究的重点。王培侠等人研究电动机在运行过程中的电流情况,研究控制电流滞环,实现换相转矩脉动抑制[4];刘旭等人以Boost电路与卡尔曼滤波为依据,对换相过程中发生的电流跌落现象实行有效处理,实现转矩脉动抑制[5]。上述方法均可降低和减小转矩脉动,但是不能够从根本上实现有效抑制,抑制率相对较低;并且,上述方法在控制过程中,易发生较高的超调量。基于此,本文以有效抑制感应电动机换相转矩脉动为目标,依据模糊控制规则,设计模糊控制器,实现转矩脉动的有效抑制。
2 感应电动机换相转矩脉动抑制
2.1 感应电动机换相转矩脉动分析
感应电动机换相时,受到相电感的影响导致电流发生异性变化率,其发生在两相之间,即导通和关断,该变化会引起电流波动,对应非换相相电流[6],以此触发换相转矩脉动。
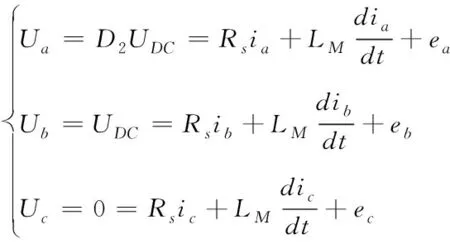
换相过程中发生的电流转矩存在两种情况,分别为低速段和高度段,低速段是下降速度低于上升速度,分别对应两个相,即关断和开通;该情况的控制,需对后者的速度实行控制,使其与前者速度一致,该结果的实现需通过开通相的PWM斩波的控制完成[7]。例如在A+C-至B+C-的换相过程中,三相电压方程为
(1)
式中:相电压用Ua、Ub、Uc表示,属于定子三相;占空比用D1表示,属于开通相。依据式(1)可得
(2)
式中:电压用Uac、Ubc表示,属于两相线;峰值用E表示,属于反电动势,依据式(2)得出

(3)
三相电流变化率需满足式(4)条件,可保证换相转矩稳定
(4)
开通相占比计算公式为
(5)
采用离散化对式(5)实行处理后,得出
(6)

(7)
式中:系数用Ka=E/Ωr表示,属于反电动势。基于此,电流预测计算公式用式(8)表示,且属于非换相相电流
(8)
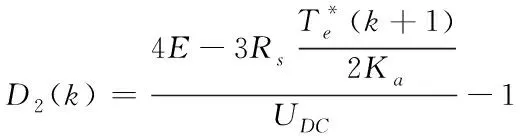
开通相在(k+1)的预测占空比的求解公式可转换成
(9)
高速段是下降速度大于上升速度,分别对应关断相和开通相[8];该情况下,开通相为常开状态,需对前者速度实行控制,使其与后者速度一致,该结果的实现需通过控制PWM斩波完成,属于关断相,完成换相转矩脉动的抑制。依旧将A+C-至B+C-的换相作为分析案例,在换相过程中,三相电压方程为
(10)
依据低速端相同原理,采用离散化处理后,获取(k+1)占空比,且属于关断相,公式为

(11)
将其转换后得出
(12)
2.2 变论域模糊控制器
基于上述分析可知,感应电动机在换相过程中,电流的变化率是导致电动机产生转矩脉动的主要原因,该原因会导致电磁转矩和定子磁链的大小,无法依据电流获取[9],因此,也无法依据两者的误差获取控制器的输出信号。为实现转矩脉动的抑制,本文依据模糊理论的模糊逻辑对两种误差属性进行模糊化处理,分别对应定子磁链和转矩,并将形成的模糊集用于模糊集控制器的输入,输出的信号即为经过模糊控制规则处理的信号,以此对变论域进行调整[10],形成变论模糊控制,控制器的结构如图1所示。

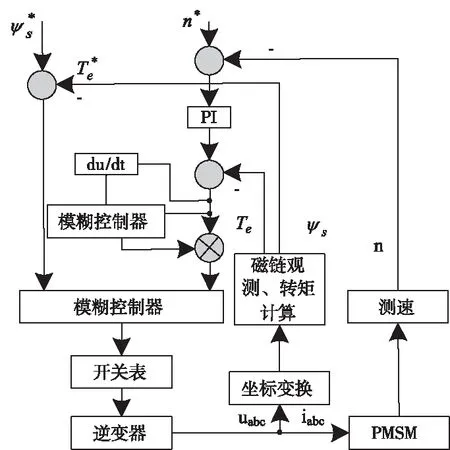
图1 变论模糊控制器
2.2.1 模糊控制器设计
模糊控制器在控制过程中的灵敏度与隶属度存在直接关联,本文为了降低运算复杂度,同时提升控制精度,选取等腰三角形的隶属度函数,且宽不相等。模糊控制器模糊推理的实现依据是模糊规则[11],该规则通过min-max合成,则加权因子αi的求解通过式(13)、(14)完成,且属于第i条规则:
αi=min[μAi(Δψ),μBi(ΔTe)]
(13)
μ′Pi=max[αi,μPi(P)]
(14)
式中:Δψ、ΔTe均表示差值,分别对应磁链和转矩。
模糊控制器中模糊规则的建立,需依据输出量的关联完成,属于两种误差和模糊控制器之间,规则详情如表1所示。
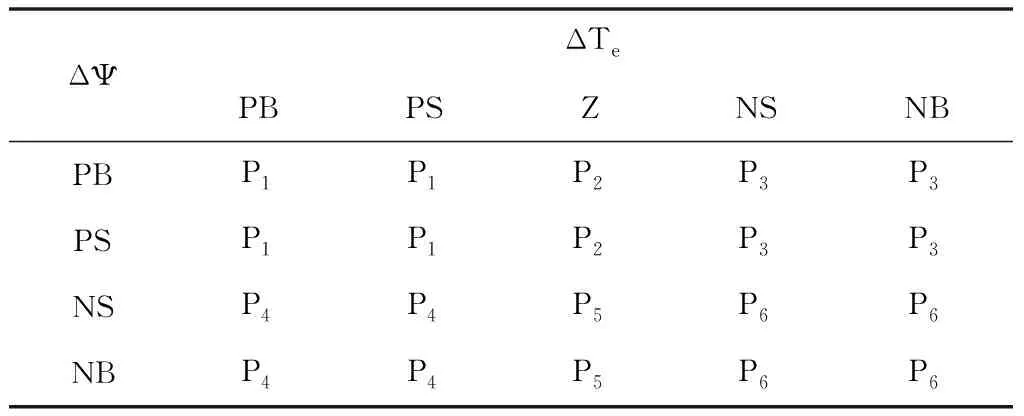
表1 模糊规则详情
表1中:控制器的输出为Pi(i=1,2,3,4,5,6);磁链误差模糊子集的大、小分别用NB和NS、PS和PB表示,前两者属于负值,后两者属于正值,则模糊论域为[-0.01,0.01];转矩误差模糊子集的大小与磁链误差的模糊子集相同,但其模糊论域为[-2,2]。
文中选取语言模糊规则,其为if(ΔψiisAi)and(ΔTeiisBi)then(outpuutisPi)。为保证Pi的取值为离散值,采用最大隶属度平均值法完成,其公式为
(15)
2.2.2 变论域控制实现
设X、N均表示论域,各自对应物理和模糊,将前者的清晰值转变为后者的变换系数,该过程中量化因子为kj,比例因子为ku。kj和ku决定信号的放大或者缩小,两者值的大小,对于最终的控制性能存在影响。
N不发生改变的条件下,输入和输出X的调整通过改变kj和ku完成,以此实现变论域,保证控制器的控制效果。
kj和ku的初始值分别为kj0和ku0,对其实行调整,公式为
(16)
式中:伸缩因子用l表示,属于输出量;l的模糊集合用{B,M,S}表示。
为保证感应电动机转矩脉动的抑制精度,模糊控制器的结构为二维,控制器的输入包含两类,分别为误差和误差率,均属于换相转矩[12];模糊集合为{NB,NS,Z,PS,PB},包含误差和误差变化率,均属于换相转矩。
3 测试分析
为验证本文方法对于感应电动机换相转矩脉动的抑制效果,采用MATLA/Simuli对感应电动机换相过程中发生的换相转矩实行仿真,感应电机的仿真参数为:电压为36V、转矩为1.8N·m,两者均为额定;等效电感为0.5mH;转动惯量为0.0044kg·m2;定子电阻为0.4Ω;转子磁链为0.03Wb;极对数为8。
将本文设计的模糊控制器部署在母线侧,实行换相过程中的电流控制,通过MATLAB /Simuli获取感应电动机A相换相电流波形图和转矩脉动波形图。然后依据图1设计的模糊控制器,对感应电动机的换相转矩实行控制,结果见图2、图3。
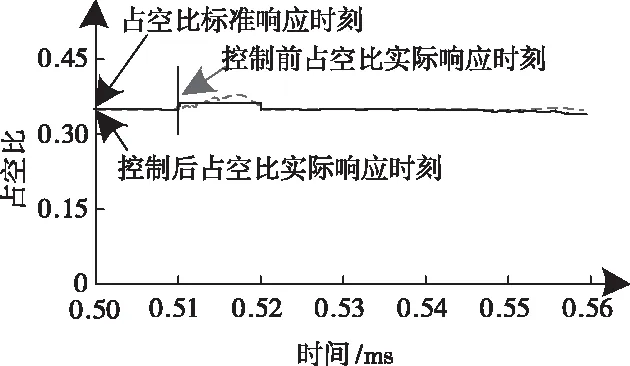
图2 占空比测试结果
结合图2和图3的测试结果可知:控制前,当感应电动机发生换相动作时,占空比的响应时间比标准时间延时0.01ms,该延时会导致完全开通时刻与关断时刻相差0.01ms,两个时刻分别对应关断相和开通相;本文方法控制后,当感应电动机发生换相动作时,占空比的响应时间与标准时间一致,此时完全开通时刻与关断时刻相同,两个时刻分别对应关断相和开通相,表示本文设计的控制器跟随性能良好,可及时跟随开通相和关断相的动作变化,有效抑制转矩脉动,保证换相过程中的转矩稳定。
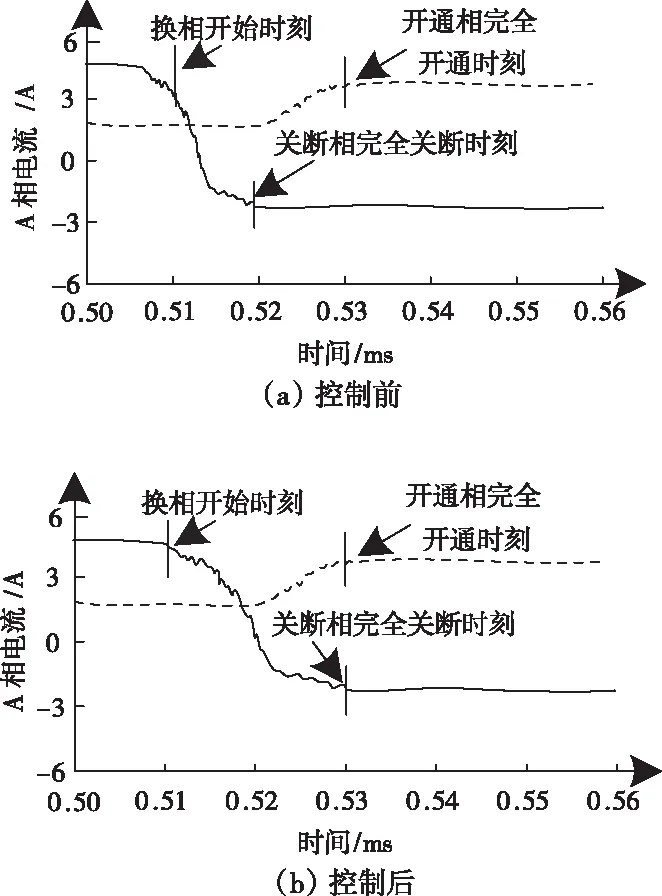
图3 电流换相测试结果
为了直观体现本文方法的控制效果,将文献[4]和文献[5]的基于电流滞环控制和基于Boost电路与卡尔曼滤波控制方法,作为文本方法的对比方法,统计三种方法在稳态情况下,换相转矩和磁链脉动峰峰值、换相转矩和磁链的脉动系数、转矩脉动抑制率,衡量三种方法的抑制效果,见表2。
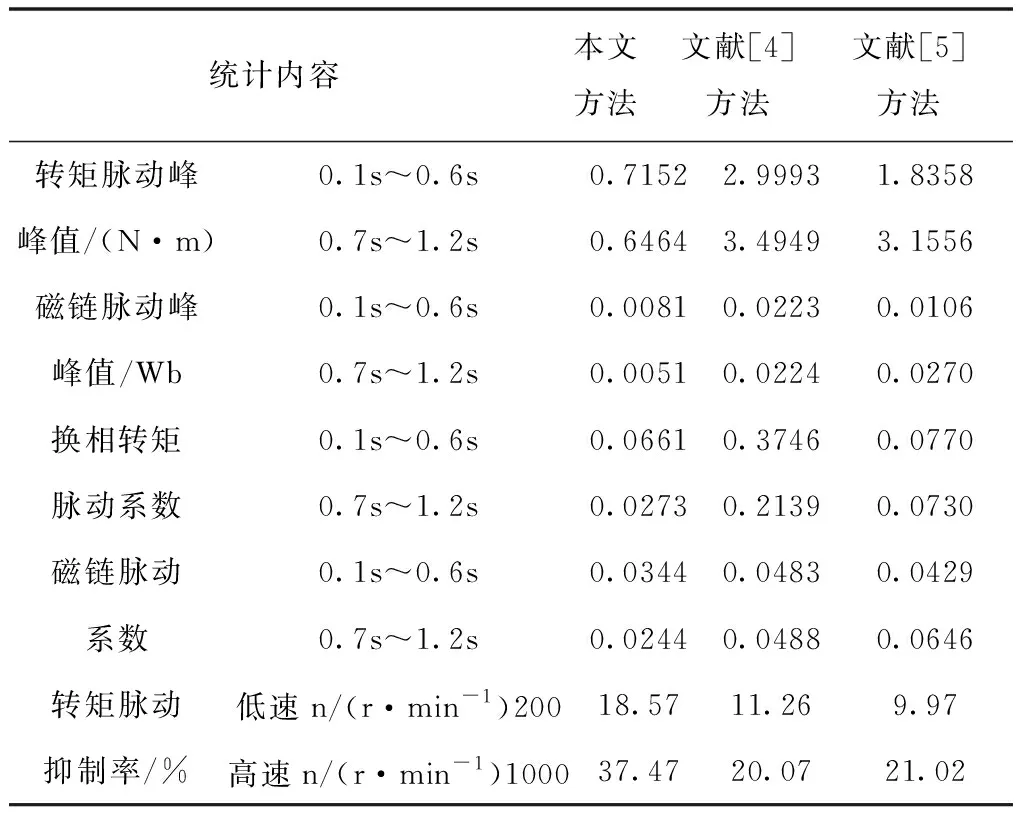
表2 三种方法的抑制效果对比结果
依据表2测试结果可知:在不同的控制时间段内,本文方法控制后,换相转矩和磁链脉动峰峰值、换相转矩和磁链的脉动系数结果均明显优于两种对比方法,并且换相转矩脉动抑制率,在低速和高速情况下,均优于两种对比方法,对于感应电动机换相转矩脉动的控制效果更佳。
为了进一步分析三种方法的控制性能,在感应电机稳定运行过程中,逐渐给其施加负载,测试三种方法在负载不断增加情况下的控制性能,结果见图4。
依据图4测试结果可知:在不同负载下,三种方法的超调量和转速差均呈现上升趋势,但是本文方法的上升幅度较小,超调量控制在0.15%以内,转速差控制在0.92(r.min-1)以内,显著优于两种对比方法,说明本文方法实现了对传统方法的优化,控制效果更优。
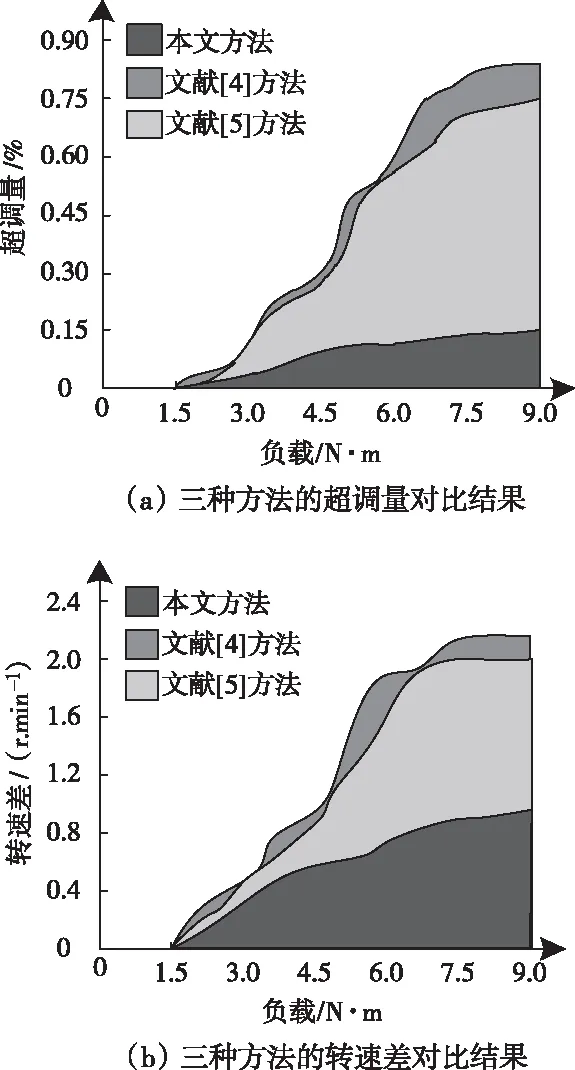
图4 三种方法的转矩控制性能对比结果
综合分析上述实验结果可知,本文方法依据模糊控制原理设计了模糊控制器,能够实现转矩脉动的有效抑制,完成了有效抑制感应电动机换相转矩脉动的目标,有利于降低电动机故障的发生频率,提升其使用寿命。
4 结论
有效控制感应电动机换相转矩脉动,是保证其运行的稳定、延长其使用寿命的有效手段。针对其在换相过程中发生的转矩脉动进行分析后,本文提出一种模糊规则下IM换相转矩脉动控制方法。以模糊控制规则为依据,设计模糊控制器,完成感应电动机换相转矩脉动的有效抑制。并通过相关模拟仿真测试得出:本文所提方法对于换相转矩脉动的抑制效果良好,可实现感应电动机转矩脉动最大抑制率为37.47%、转速差较低,抑制效果显著优于两种对比方法。
虽然本文方法取得了一定的研究成果,但是为了进一步提升抑制效果,还需针对不同时刻的转矩进行有效控制,将波形幅值控制在较小的范围内,进一步实现转矩脉动的优化抑制,提升本文方法的控制效果。
