浮空器囊体检漏机器人力学特性仿真研究
2023-03-11张天晓杨燕初曹胜鸿
张天晓,杨燕初,曹胜鸿
(1. 中国科学院空天信息创新研究院,北京 100094;2. 中国科学院大学,北京 100049)
1 引言
飞艇和系留气球作为一种理想的空中平台,具有留空时间长,覆盖面积大,能源消耗低,便于拆收,机动性强的特点,除了可用于气象预报、飞行器检测、广播通讯、地形测绘业务之外,还能用于低空预警,特别是可以用作边防、海防的空中检测平台[1]。然而由于飞艇和系留气球的囊体(蒙皮)一般为复合织物材料,由多层复合而成,在使用过程中,由于反复折叠、充放气等操作,囊体材料本身会存在局部泄漏。囊体泄露对浮空器的保压性,保形性[2]有很大的影响,因此囊体检漏变得尤为重要。
目前,国内外针对浮空器囊体检漏相关的机器人系统尚未普及应用[3],因此设计了一个检漏机器人针对囊体进行检漏的任务,检漏机器人如何开展检漏工作如图1所示。首先利用三维软件UG来建立检漏机器人的三维模型,其次由于检漏机器人研发繁琐和工作环境较为复杂,需要在研制试验样机之前,对运动模型进行静力学和动力学分析后,利用设计的参数,用过MATLAB软件进行仿真,来实现检漏机器人设计要求。
本研究针对检漏机器人的结构特点,通过静力学和动力学分析检漏机器人囊体运动的受力情况,建立相对完整的运动模型,通过研究吸附单元吸附力和倾斜角的关系,电机所需驱动转矩与倾斜角和载荷分布系数的关系,进行理论分析和计算机仿真,确定了本机器人吸附单元的最小吸附力和电机所需驱动转矩。
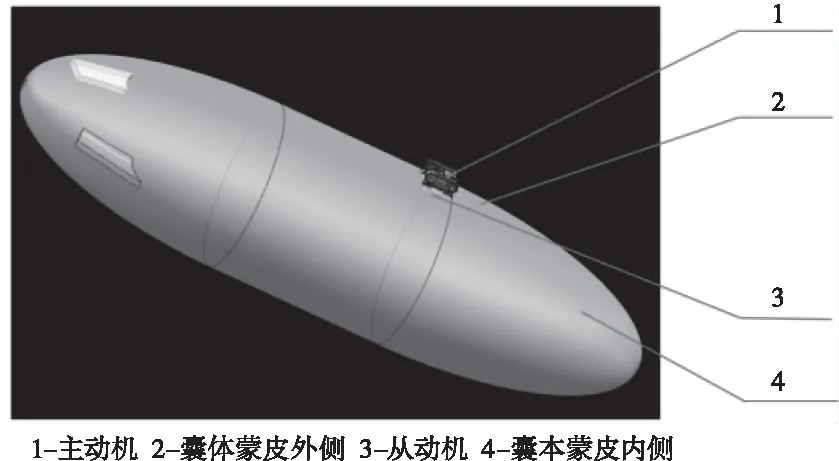
图1 检漏机器人工作示意图
2 系统方案
囊体检漏机器人的设计要求主要包括:高可靠性和经济性以及简单操作和维护等性能[4,5],具体需要满足的要求如下:
第一,保证检漏机器人能可靠地在飞艇囊体表面行走,需要设计防倾覆机构。
第二,考虑到检漏过程中可能会对囊体产生二次损伤,因此需要考虑机器人加载在囊体表面的应力大小。
第三,检漏机器人需要便于维护,简单操作,考虑到囊体较大,能源问题继续解决,因此需要尽可能减小检漏机器人的质量。
第四,根据囊体检漏机器人的设计要求,考虑其实际应用的场合主要为飞艇或系留气球顶部等人力无法达到的位置,为保证可靠的在飞艇囊体表面上行走,检漏机器人需在0-90°倾角内行走。
本设计方案采用履带式行走机构[6],有两个直流减速电机提供驱动力,通过减速器给主动轮提供转弯所需要的转矩,两个履带分别配有一个主动轮和一个承重轮。上述设计的具体机械模型如图2所示。
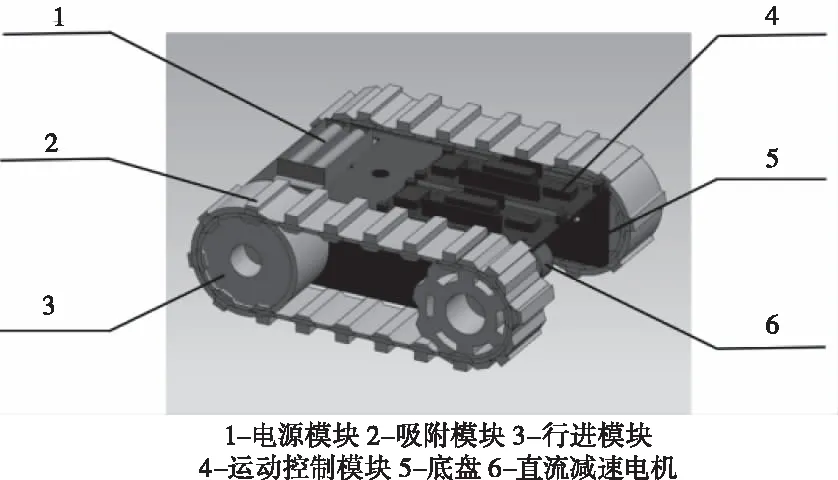
图2 检漏机器人结构示意图
3 力学特性分析
本研究是以飞艇囊体表面漏洞检测为应用背景[7],分析检漏机器人受力情况,从静力分析和动力学分析两方面研究其运动模型的,考虑到飞艇囊体体型较大,而机器人体积较小,检漏机器人工作时近似在平面上行走,因此对其运动模型进行简化,简化后的运动模型如图3所示。以检漏机器人质心o为原点,建立固定在机器人上的运动坐标系o-xyz,其中,x,y轴分别为机器人横向、纵向对称轴,z轴为壁面法向量,θ为壁面与水平面的夹角,φ为机器人方位角。
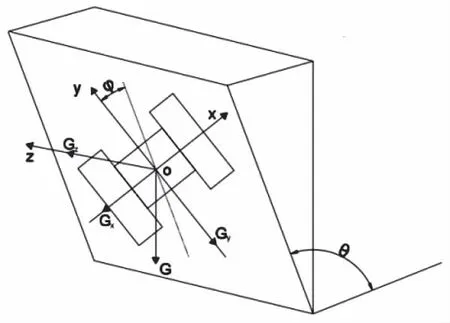
图3 检漏机器人运动模型
3.1 静力分析
检漏机器人的履带由许多吸附单元连接而成,通常情况下,履带对壁面的垂直压力不能均匀的分布在每个吸附单元上[8],考虑到本检漏机器人结构简单,附加的检漏功能及整体载荷分布均匀,为了便于对机器人进行静力分析,因此假设机器人履带上的吸附单元受到的压力及吸附力相同。静力分析中检漏机器人会出现两种失效形式,有两种危险姿态,分别为沿囊体表面向下滑移和纵向倾覆。
3.1.1 机器人向下滑移失稳
检漏机器人在检漏过程中,在重力的作用下,会发生向下滑移失稳的情况,履带上的永磁吸附单元与囊体表面的摩擦力和内外永磁吸附单元产生的吸附力会克服重力的作用,使机器人能够稳定地吸附在囊体内外两侧,对检漏机器人向下滑移进行受力分析如图4所示。
G是机器人自身重力,Gx是机器人重力侧向分力,Gy是机器人重力纵向分力,Gz机器人重力法向分力,Fmi是履带上与壁面接触的第i个吸附单元对壁面的吸附力;Nmi是履带上与壁面接触的第i个吸附单元的正压力;Fd是载荷的反作用力,这里为零(暂不考虑);Nt是我添加防倾覆机构后,墙壁对其的支持力;Ff为机器人单侧履带所受的摩擦力,μ是履带与壁面之间的最大静摩擦系数,n为单侧履带上与壁面接触的吸附单元数目。
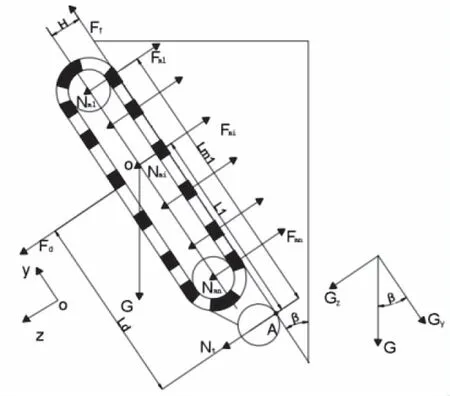
图4 检漏机器人静力受力图
机器人向下滑移失稳主要由于囊体表面对机器人的摩擦力Ff小于重力在y方向的分量Gy。为了保证机器人不向下滑移失稳,需要以下条件成立
(1)
其中
(2)
对机器人在z轴方向进行受力分析可得

(3)
联立

(4)
就可以得到履带上吸附单元最小吸附力。
3.1.2 机器人纵向倾覆失稳
机器人在囊体表面工作过程中要保证不发生倾覆翻转,就必须保证履带上的第一个吸附单元不脱离囊体表面,也就是要求其吸附力提供的抗纵向倾覆力矩能够抵抗机器人的纵向倾覆力矩。
抗纵向倾覆力矩Q1
Q1=2Fm1Lm1
(5)
式中:Lm1是第一个吸附单元到防倾覆点A的y方向距离,Fm1是第一个吸附单元的吸附力。
纵向倾覆力矩Q2:
Q2=FdLd+GHcosβ+GL1sinβ
(6)
式中:L1是机器人质心O点到防倾覆点A的y方向距离,Ld是Fd到A点的y方向距离,H是质心B点到防倾覆点A的z方向距离,
想要机器人不发生纵向倾覆的情况,需要满足以下条件
Q1≥Q2
(7)
将式(5,6)代入式(7)中可得

(8)
当单个吸附单元吸附力满足式(8)时,检漏机器人不会绕Z轴倾覆。
3.2 动力学分析
3.2.1 直行动力学分析
机器人进行直行运动时,向上直行的驱动扭矩明显高于向下直行运动,因此考虑向上直行运动。通过对文献的借鉴和对实际工作情况考虑可以得出,当检漏机器人由静止到运动状态,机器人单边履带上的电机驱动转矩最大,需要克服摩擦力Ff提供的阻力矩Mf和重力转矩MG以及驱动轮角速度阻力矩。
MQ-Mf-MG=Joεo
(9)
式中:MQ为单侧电机经减速器输出的驱动转矩;Mf是摩擦力提供的阻力矩;MG是机器人及其负载总重力产生的阻力矩。Jo是机器人绕质心的转动惯量;εo是驱动轮的瞬时角加速度。
1/2机器人总重力产生的转矩为
(10)
机器人履带上最后一个吸附单元产生的阻力矩为
Mf=(Fn-N1)H
(11)
将式(10,11)代入式(9)可得到单侧电机最小驱动转矩

(12)
3.2.2 转向动力学分析
检漏机器人做转向运动时,机体本身会与囊体表面发生相对位移,从而导致吸附单元的保护套和囊体表面形成滑动摩擦力,进而阻碍机器人转向运动[9]。机器人转向主要是通过两个履带之间差速实现的,左右履带相差的速度越大,转向速度和转向半径也越大,这对机器人转向运动的灵活性有很大的影响[10]。
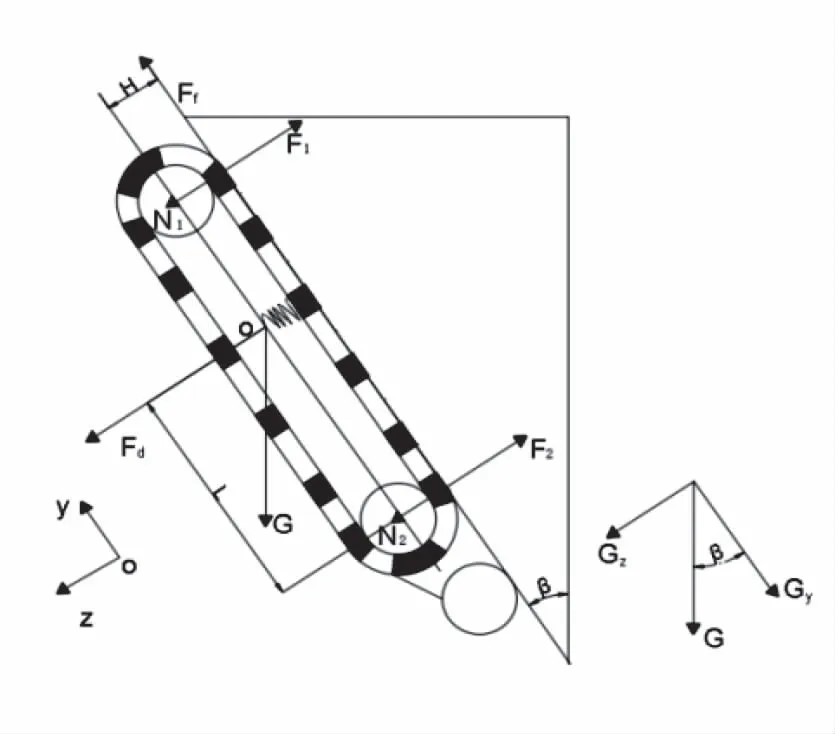
图5 简化后检漏机器人受力分析
根据文献[11]中对转弯运动模型的分析,结合本机器人实际工作情况,负载较小机器人的重力主要分布在两侧履带上,因此只考虑摩擦阻力矩Mz、Mf和MGy以及驱动轮角速度阻力矩的影响[12]。在分析过程中简化受力模型,假设履带上的吸附单元所受压力均匀分布。
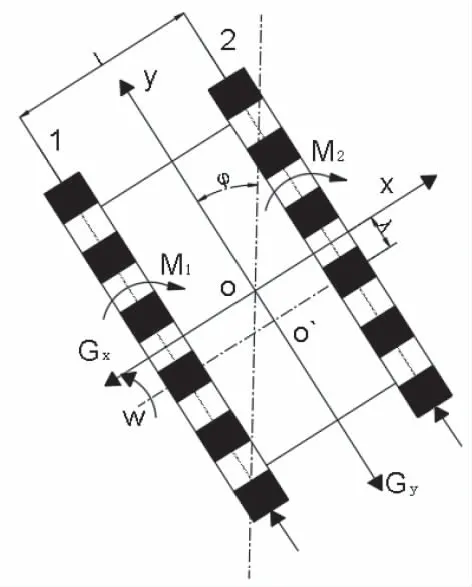
图6 检漏机器人转向受力分析

(13)
式中:r为驱动轮半径,l为检漏机器人宽度。
机器人履带上最下面吸附单元产生的阻力矩为
Mf=(Fn-N1)H
(14)
履带上吸附单元与囊体表面的摩擦力产生的摩擦阻力矩
(15)
机器人单侧质量产生的力矩:在这里将模型简化为机器人总质量均布在左右履带上。
(16)
履带驱动转矩和电机转向驱动转矩的关系为
(17)
将式(14,15,16,17)代入式(13)可得到机器人转弯时电机最小驱动转矩:

(18)
4 仿真及结果分析
4.1 吸附单元最小吸附力
通过上面分析可得出,要保证检漏机器人安全可靠的吸附在囊体表面上,吸附单元提供的最小吸附力Fm要同时满足式(4)和式(8)。本检漏机器人设计参数分别为:G=5N,Fd=0,Nt=2N,Ld=100mm,L1=96mm,Lm1=100mm,n=6,μ=0.85,H=30mm。将上述数值代入MATLAB软件中进行数值仿真,可以得到吸附单元最小吸附力的仿真曲线,如图7所示。
当与竖直平面夹角β大于18.6°时,抗纵向倾覆所需的最小吸附力明显大于抗下滑所需的最小吸附力,吸附单元所需的吸附力最大值为1.303N,当与竖直平面夹角β大于18.6°时,抗纵向倾覆所需的最小吸附力明显小于抗下滑所需的最小吸附力,吸附单元所需要的最小吸附力明显小于1.303N,考虑到充气后囊体表面可能存在褶皱导致吸附效果不理想,因此设置安全吸附系数,吸附单元最小吸附力为3N。
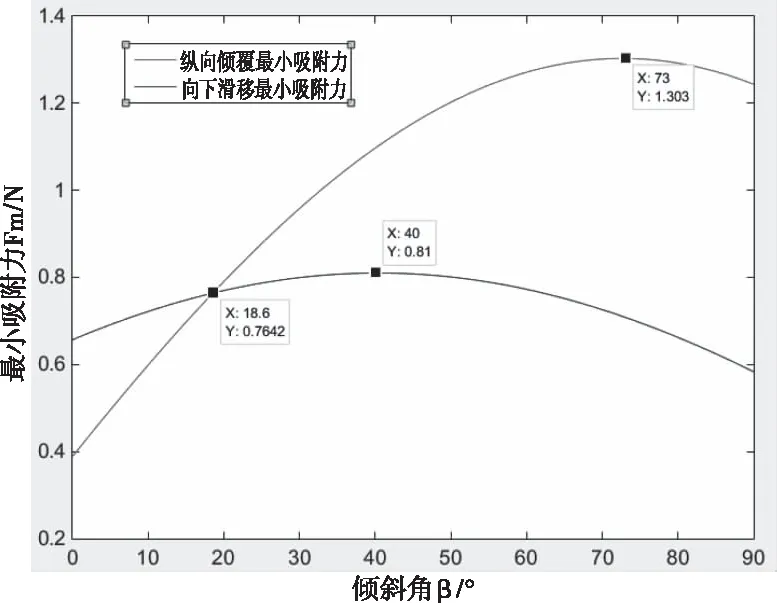
图7 吸附单元最小吸附力和倾斜角的关系
4.2 驱动电机所需转矩
设定参数Fm=3N,Jo=45kg·mm2,εo=0.2rad/s2,r=30mm,l=160mm其余物理参数不变,根据式(12,18),将参数代入MATLAB软件进行数值仿真,得到检漏机器人转向和直行所需的驱动转矩,如图8所示。
由图8可以看出,机器人作转弯运动时电机所需的驱动转矩明显大于直行时电机所需的驱动转矩,这与文中理论分析相符合,机器人做转弯运动时电机所需转矩受倾斜角β影响较大。当β=0°时,所需最小电机驱动转矩为210N·mm。
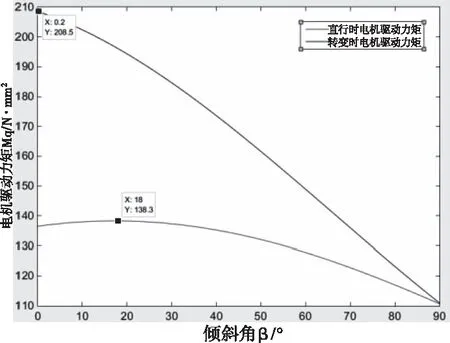
图8 电机所需驱动转矩和倾斜角的关系
为了研究检漏机器人转弯和直行两种工作状态下,电机所需转矩跟囊体表面与竖直夹角β和载荷分布系数的关系,设置载荷分布系数,利用MATLAB软件进行仿真得到以下结果,直行时的结果如图9所示,转弯时的结果如图10所示。
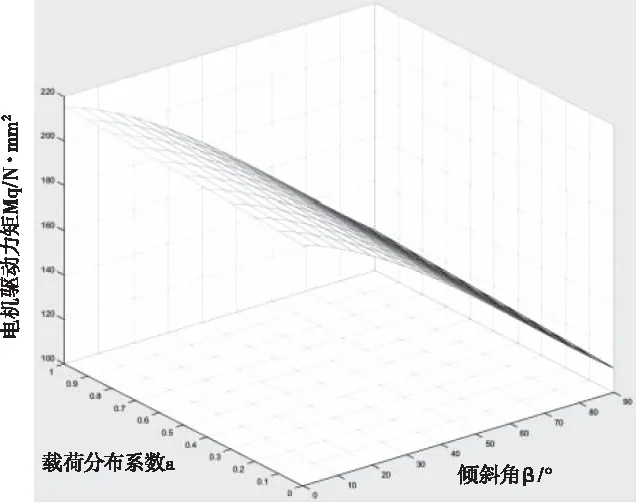
图9 直行时电机所需转矩与倾斜角β和载荷分布系数a的关系
可以看出无论是直行运动还是转弯运动,电机所需驱动转矩都随倾斜角β的增大而增大,随载荷分布系数a的增大而增大,但对于转弯运动来说,电机所需驱动转矩受载荷分布系数a的影响不大主要受倾斜角β的影响,而直行运动时电机所需驱动转矩受载荷分布系数a的影响远远胜过倾斜角β的影响。
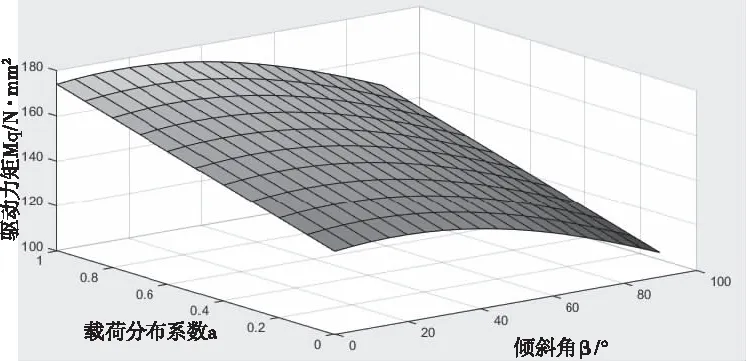
图10 转弯时电机所需转矩与倾斜角β和载荷分布系数a的关系
5 结论
本研究针对浮空器囊体检漏机器人进行了受力分析。首先设计了检漏机器人的三维模型,然后对检漏机器人进行了静力学分析和动力学分析,建立了运动模型,并利用设计的机器人的硬件参数进行理论分析和运算仿真,得到了检漏机器人吸附单元最小吸附力和在不同倾斜角和载荷分布系数下电机所需的驱动转矩,研究结果表明在大倾斜角的情况下,检漏机器人比较容易出现纵向倾覆的情况,通过对研究结果进行分析,得到了机器人直行时电机驱动转矩主要受载荷分布系数影响,转弯时主要受倾斜角的影响结论。本研究结果为检漏机器人的结构设计和安全吸附力提供了理论支持。
