面向冬奥冰雪运动损伤康复机器人研制
2022-12-15荣铁成贾秀贤
荣铁成,贾秀贤
(张家口市第二医院,河北 张家口 075000)
0 引言
第24届冬季奥林匹克运动会(XXIV Winter Olympic Games)又称2022年北京冬季奥运会,举办地为北京和张家口。随着本届冬奥会时间逐渐推进,相关工作也有条不紊的进行中,当然也包括冰雪运动损伤的预防、治疗和护理等。结合既往冬奥会、残奥会相关实例来看,冰雪运动损伤中的急性运动损伤发生率极高,常规康复方法整体康复周期相对较长,疗效不显著,在加上冰雪运动损伤存在显著的多器官、多组织损伤特点,传统的理疗康复手段单一,康复治疗人员储备不足等问题必须得以有效解决,也是本届冬奥会技术保障的迫切需求。可穿戴外骨骼机器人是目前全球范围内最先进的康复机器人,如HAL、eLEGS、REX及ReWalk系列(图1)等[1-4]。这种基于仿生原理和结合人体工程学设计的机器人,在佩戴后既可确保人体自由度与机器人运动模式同轴,也可极大提升脊髓损伤、创伤性脑损伤、多发性硬化症等疾病患者的康复训练效果,如ReWalk系列(以色列)业已在欧洲、美国等市场中得以应用,可满足多种患者的训练需求。同时,来自欧洲某跨领域国际研究团队所设计的软体仿生外骨骼机器人(XoSoft)还可直接将其穿在身上[6],如图1-b(概念图),产品原型已于2019年推出。

图1 康复机器人实例图
相较于国外环境而言,国内与康复机器人相关的研发却完了几十年,但随着我国科技水平的整体提升,康复机器人业已得到国内医疗领域的高度关注与重视,经各大康复研究机构和高校科研单位的不断努力,也取得相应成果,如清华大学研发的二自由度(2-DOF)、华中科技大学研发的三自由度(3-DOF)、哈尔滨工业大学研发的五自由度(5-DOF)等机器人以及广州一康研发的A1-下肢智能反馈训练系统、A2-上肢智能反馈训练系统、A3-步态训练与评估系统、A4-手功能训练与评估等[7-11]不仅应用于临床,且取得了较好治疗效果。须注意的是,虽然上述国内外研究机构和企业所研究的机器人在脑脊神经损伤康复中取得了较好的临床效果,但由于其所涉及的范畴多集中在严重运动性或者创伤性的神经损伤的长期康复和治疗方面,故对运动型损伤的快速应急康复治疗却关注度不够或尚未关注。因此,本课题将在结合既往研究的基础上,提出基于人体整体训练(将人体作为一个整体)的全身康复及多种手段耦合一体化的康复新理念,结合2022年北京冬奥会开展针对全身、多功能模块挤成、耦合多种康复增强物理疗法的运动型损伤专业机器人研究,以提高冰雪运动员可能存在的运动性损伤的整体康复效率,提升其康复效果,促进其快速回复运动能力,为2022年北京冬奥会和残奥会的高水平、高质量保驾护航。报道如下所述:
1 康复机器人的整体设计
结合既往冬奥会与残奥会冰雪运动员的损伤后的康复治疗案例来看,运动性损伤康复机器人的基体部分主要是多功能床体。故为帮助冰雪运动员运动损伤后能尽快从运动性损伤中恢复,多功能床体的设计必须能有效的配合运动员的运动损伤情况开展有针对性的个性化康复训练。因此,本课题中康复机器人的整体设计主要从运动员运动损伤康复的需求角度和医护人员康复角度出发,适应性的解决运动型损伤问题,这也是本文将康复机器人设计为能满足卧姿、坐姿、站姿等3种模式[12]于一身的原因,目的是为解决以下几个问题:首先,对严重性运动性损伤者采用卧式康复训练;其次,待运动性损伤得以缓解后(或无需卧式康复训练者)科学、合理配合以坐式康复训练;再次,待运动性损伤程度较轻(或无需卧式、坐式康复训练者)、肢体拥有一定运动能力者开展站式康复训练,图2所示。多功能床体主要由背部半结构、外接式座位板、外接式床板结构、位姿变换结构(含翻折机构、升降机构等两个板块)及其他辅助性结构等5个部分构成[13],安全性、可靠性、实用性均满足。多功能床体相关配套设施包括简单易用型智能训练系统,智能上肢康复机器人训练评估系统,智能康复机器人按摩评估系统、智能下肢运动强化训练评估系统(图2),康复评定与人体运动信息提取系统(EMG、EEG),肝肿瘤热消融超声影像导航系统等。
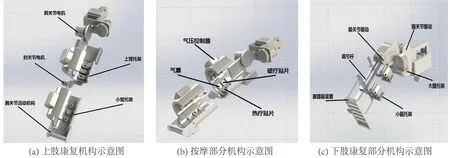
图2 多功能床体总体合计的三维模型图
2 康复机器人结构方案选定与构建
2.1 人体尺寸范围标准
为满足冬奥会与残奥会中冰雪运动员的实际需求,本课题的康复机器人结构方案的选择均依据《中华人民共和国体育法》相关原则,参照《运动员技术等级标准(2019年版)》(体竞字[2019]40号)中与人体尺寸范围相关标准,同时为满足本届冬奥会和残奥会后本系统能更好的投入医疗市场,为普通运动性损伤患者的临床治疗造福祉,本文还参照《全国成年人人体尺寸标准》(GB10000-1988)摘录和(或)编订了两个(男、女)人体尺寸表,包括百分位数、身高(cm)、上臂长(mm)、前臂长(mm)、坐肩高(mm)及肩宽(mm)等7项,如表1、表2,以避免由于康复机器人结构不合理使患者的康复训练存在不良反应,对康复机器人产生厌烦心理。
表1 BCI+EXO组及常规训练组FMA、ARAT、WMFT评分比较(,分)
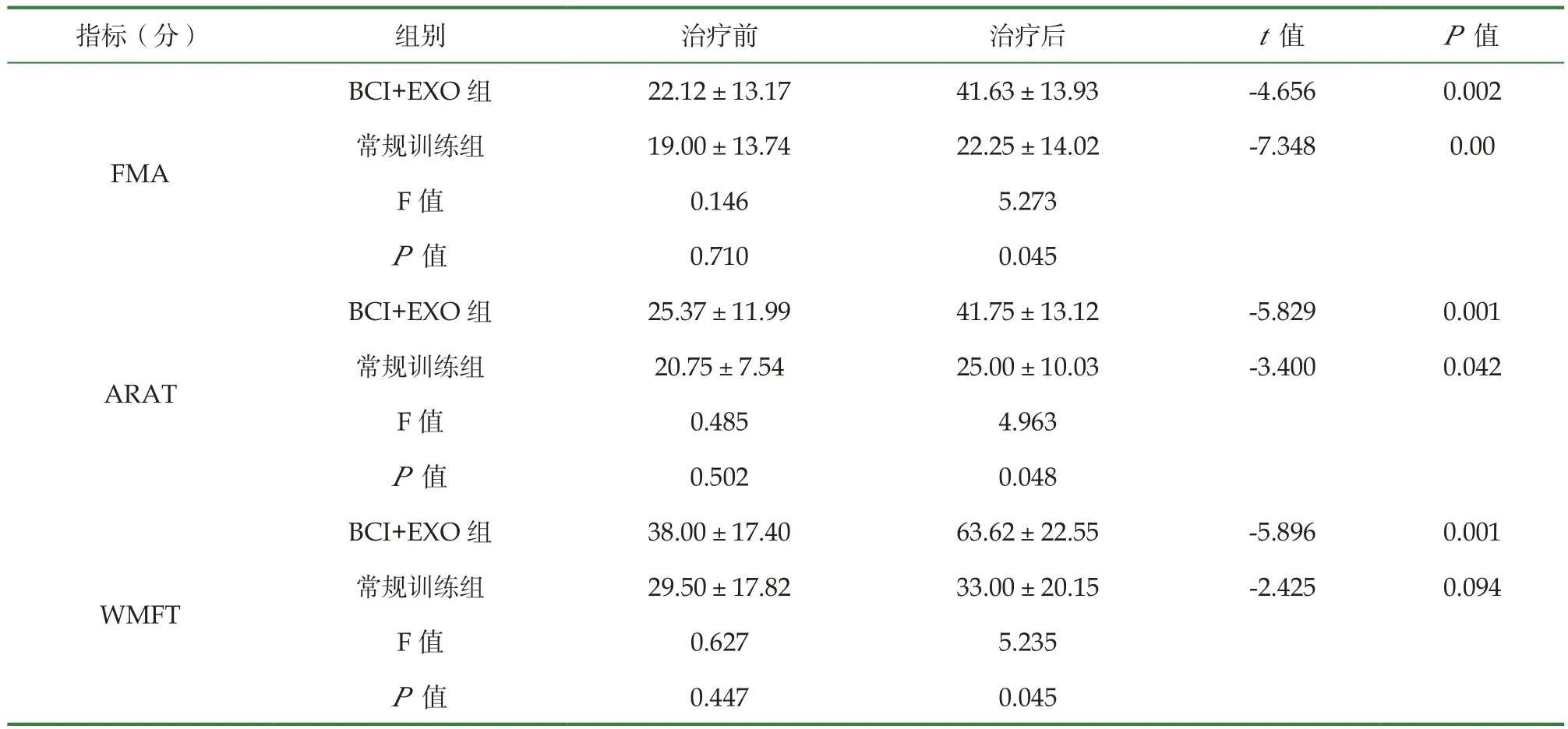
表1 BCI+EXO组及常规训练组FMA、ARAT、WMFT评分比较(,分)
指标(分) 组别 治疗前 治疗后 t值 P值FMA BCI+EXO 组 22.12±13.17 41.63±13.93 -4.656 0.002常规训练组 19.00±13.74 22.25±14.02 -7.348 0.00 F值 0.146 5.273 P值 0.710 0.045 ARAT BCI+EXO 组 25.37±11.99 41.75±13.12 -5.829 0.001常规训练组 20.75±7.54 25.00±10.03 -3.400 0.042 F值 0.485 4.963 P值 0.502 0.048 WMFT BCI+EXO 组 38.00±17.40 63.62±22.55 -5.896 0.001常规训练组 29.50±17.82 33.00±20.15 -2.425 0.094 F值 0.627 5.235 P值 0.447 0.045
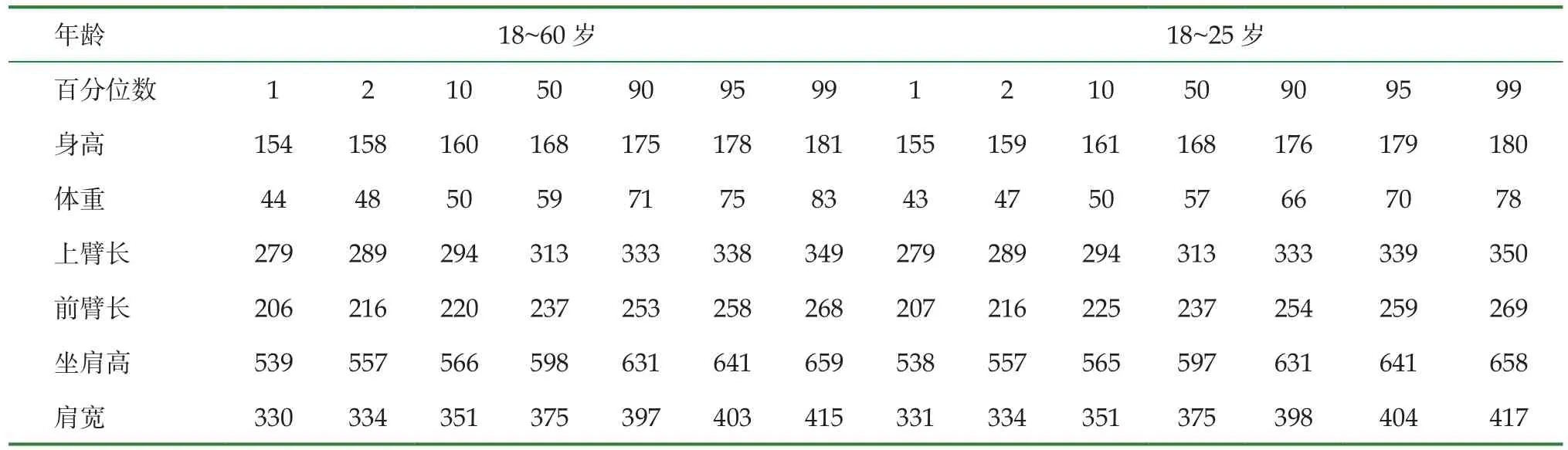
表1 人体主要尺寸(男)
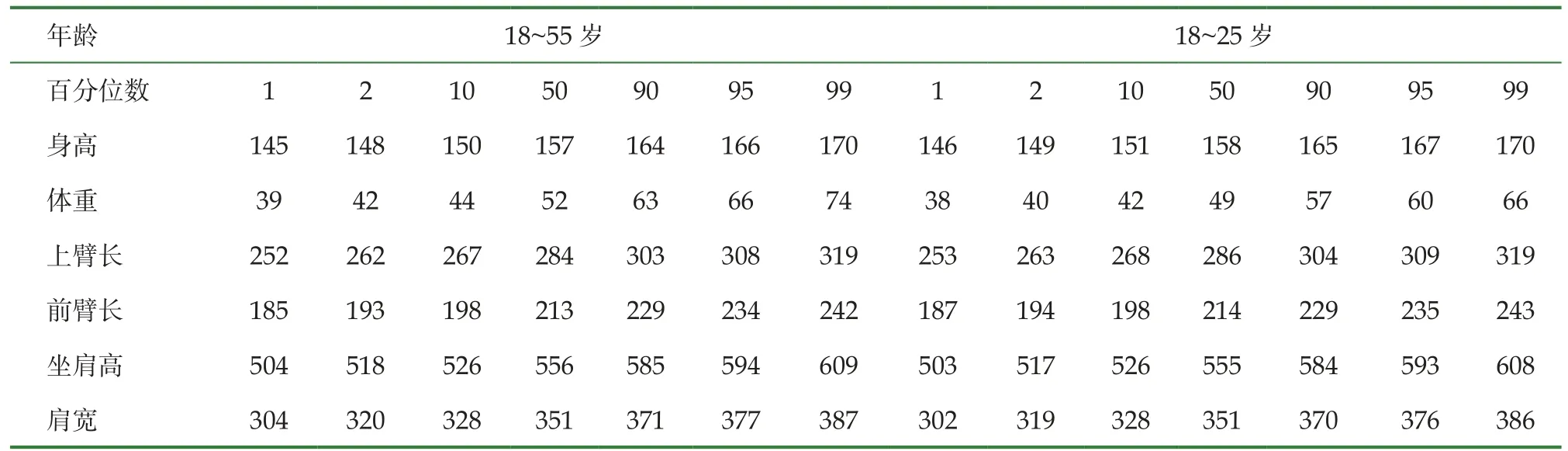
表2 人体主要尺寸(女)
为了满足不同运动型康复患者要求,本文所设计的肩关节康复机器人结构尺寸调节范围应尽量的覆盖上面表格中的尺寸,并且在机器人与人肢体接触处的地方,尺寸比例遵循人体解剖学,使得机器人的结构更合理,让患者穿戴机器人进行康复训练时感到更舒适。参照人体肩关节生理结构划分标准将康复机器人的自由度分成3部分,表3所述,康复机器人的自由度简图如图3所述。并按照此标准康复机器人的于运动参数进行设计。

表3 肩关节运动参考值的极限范围
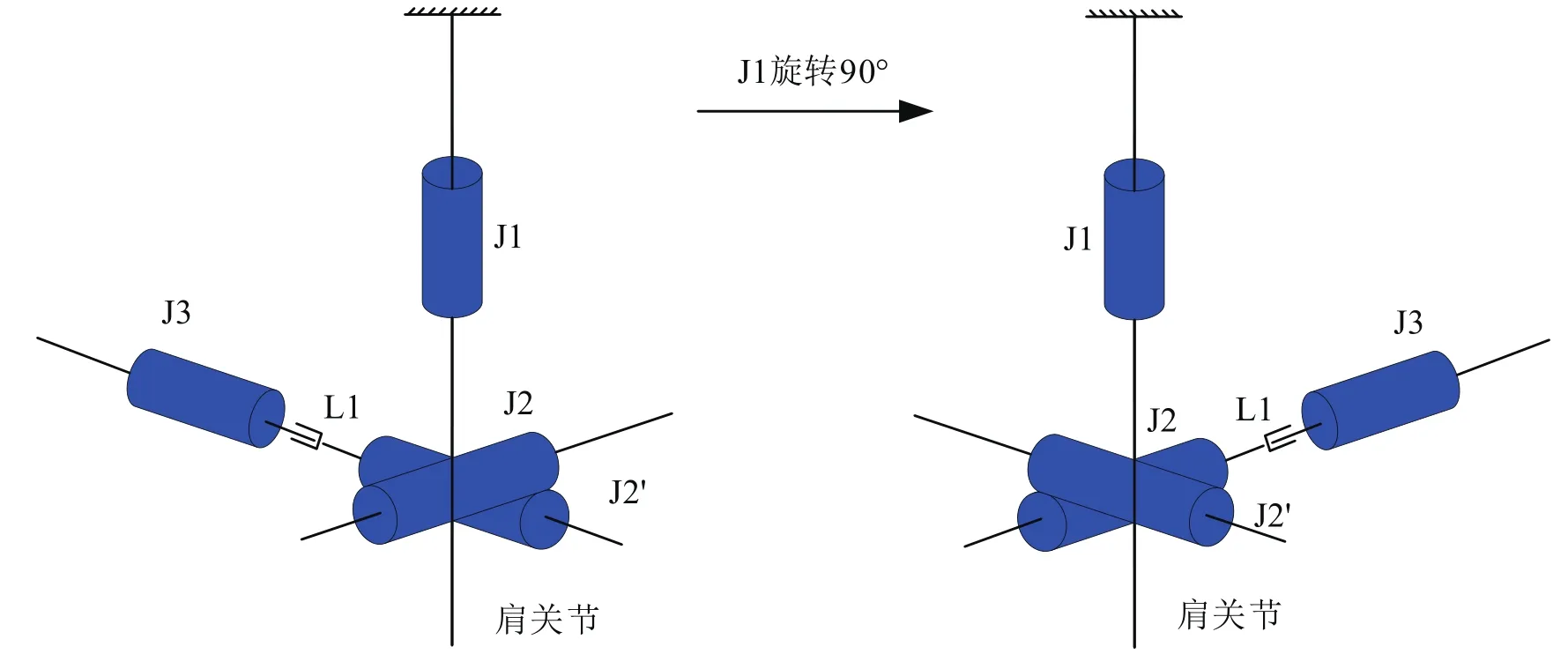
图3 康复机器人自由度简图
2.2 康复机器人的姿态运动
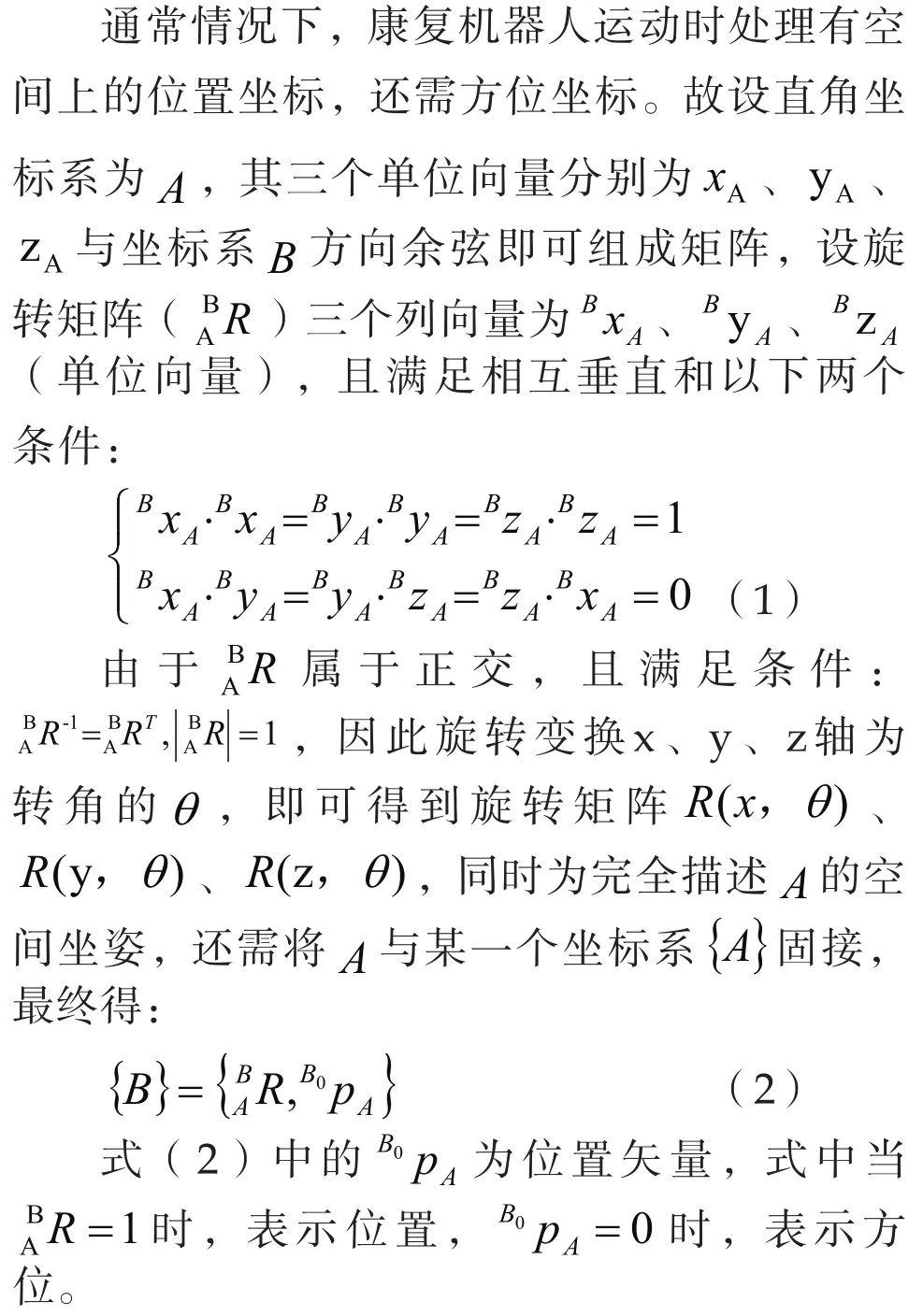
2.3 康复机器人的动力学分析
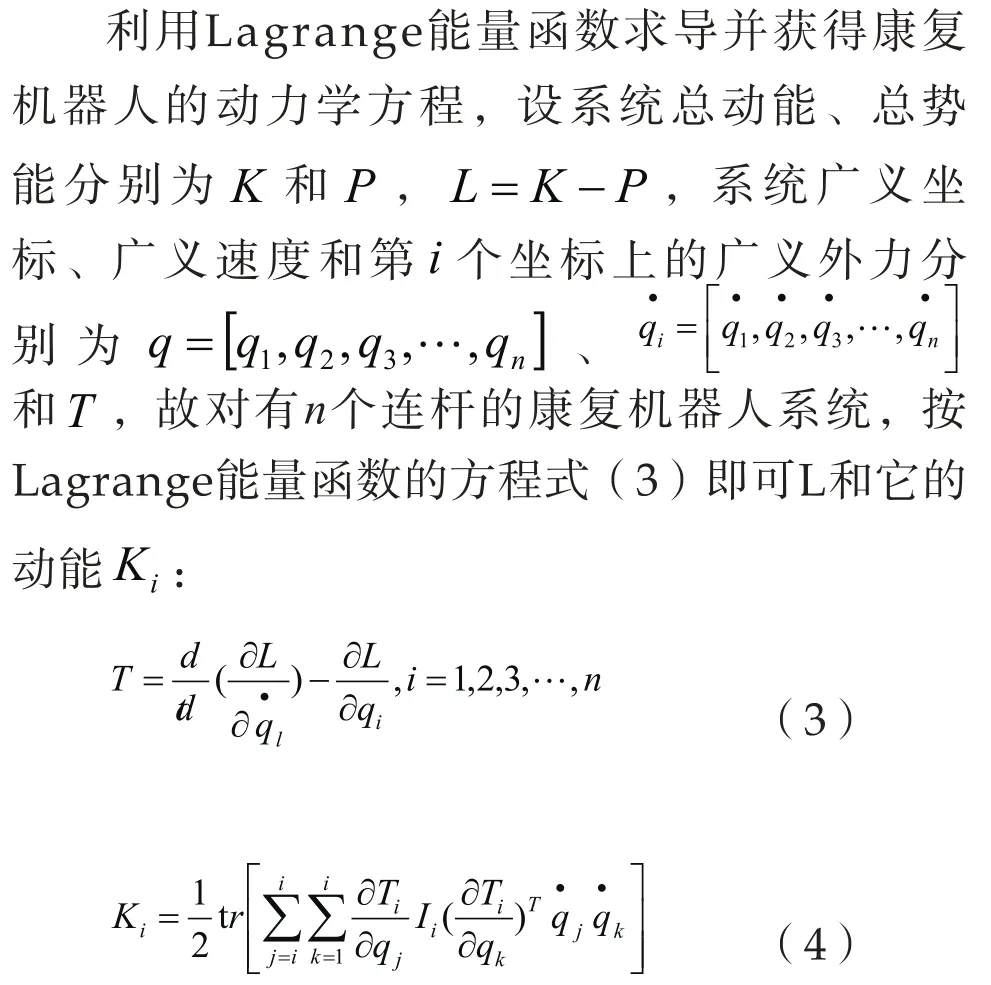
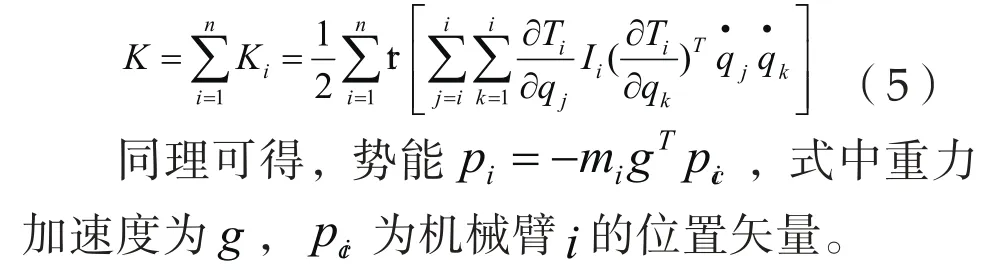
式(4)中的Ii为质心处的转动惯量。故当康复机器人有n个连杆时,康复机器人系统的动能之和(K)的计算公式:
2.4 运动性损伤康复医疗基础数据分析及实验
针对目前常用的运动康复周期长、疗效不显著的问题,结合冬奥会以及冬残奥会过程中多器官、多组织的损伤特点,对运行性损伤的基础医疗数据进行系统分析,将单一功能康复治疗和多功能康复治疗手段的数据进行对比,识别运行性损伤康复治疗的关键数据及影响机制,并应用于临床实验研究,从而获得运动性损伤多功能耦合康复机理,为运动性损伤康复机器人的研制提供基础数据和技术要求。
2.5 康复机器人机构优化
针对上下肢康复、主被动运动康复及耦合按摩、电疗、磁疗、热疗等多功能康复要求,在运动性损伤多功能耦合康复机理基础上,整合康复机器人的功能需求和耦合治疗方法,将机械、物理等多种疗法合理集成进行康复机器人上下肢运动机构、主被动运动机构、运动员力量训练机构等运动学和动力学分析。进行康复机器人整体结构进行模块化设计,不同的功能部件形成标准化模块,便于模块组合和安装,也便于产业化生产和提高产品的一致性。
2.6 机器人多功能耦合功能实验验证及康复医疗专家数据库建立与实现
针对冬季冰雪项目运动损伤特点和快速康复训练要求,结合张家口市第二医院的医疗优势,开展康复机器人多功能耦合功能验证实验,采用多功能耦合康复机器人对运动康复参数和理疗康复参数进行精确控制,验证并提升多功能耦合的康复效果。并根据主被动机械康复训练模块、运动员力量恢复训练模块、多种理疗手段(按摩、热疗、磁疗)等机器人多功能耦合康复医疗实验数据构建专家数据库。运动性损伤康复机器人系统实现的部分功能,如图4所述:
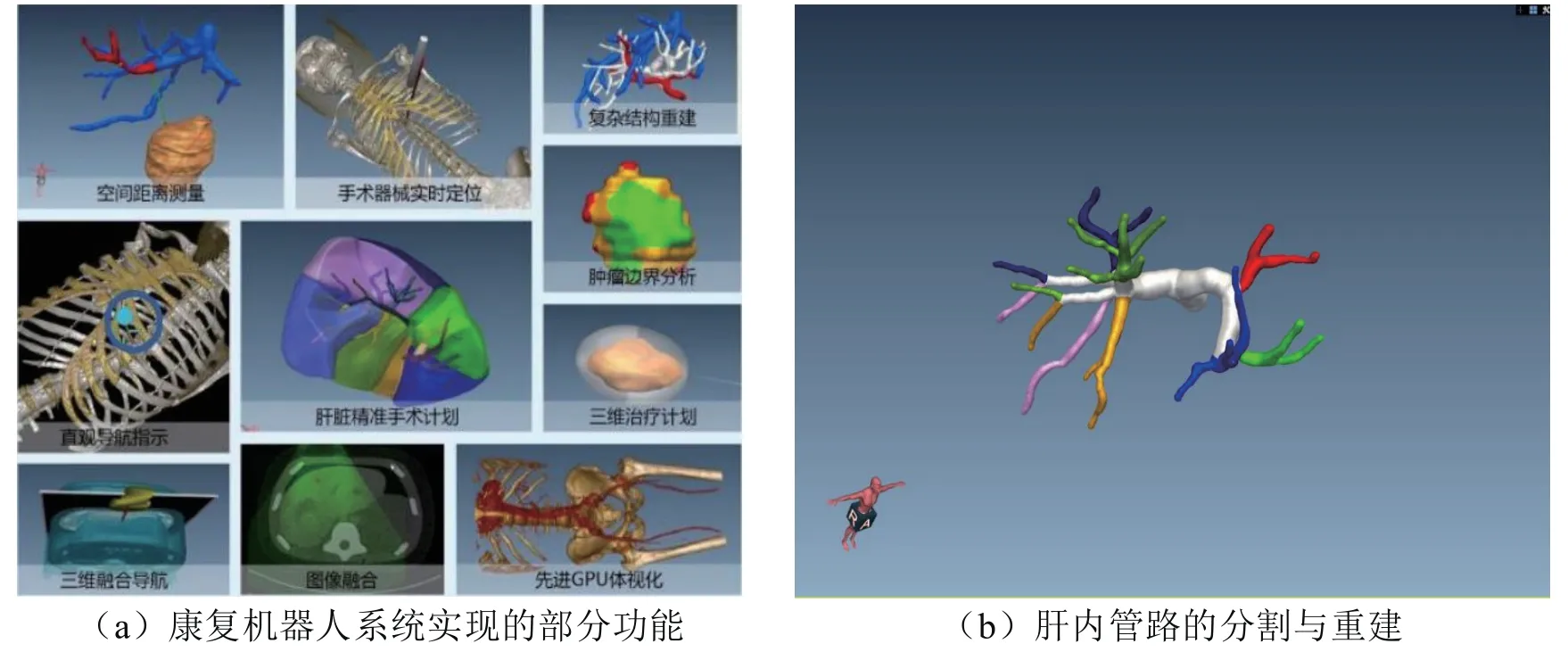
图4 康复机器人系统实现的部分功能与管路分割与重建
3 实验验证
3.1 BCI+康复外骨骼机器人临床效果优于常规训练
为验证本系统的有效性,选取51例(其中BCI+EXO组27例、常规训练组24例)脑卒中患者为研究对象。临床试验结果发现,在常规康复治疗基础上增加脑机界面(BCI)技术结合手外骨骼机器人训练(EXO)相比常规训练,可使大部分脑卒中患者手功能出现明显改善,Fugl-Meyer运动功能(FMA)、上肢运动研究量表(ARAT)及运动功能测试量表(WMFT)评分均较治疗前有显著提高。
3.2 BCI+外骨骼训练与常规训练中枢机制比较
如图6所述,经脑卒中患者训练后静息态磁共振信号多模态脑功能网络评估发现,BCI+EXO组的大脑半球间及同侧半球间不同脑区功能连接数量及相关性改善较常规训练组显著更优。
图5 脑卒中患者进行BCI+EXO训练
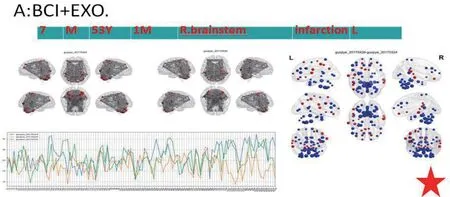
图6 BCI+EXO训练前后脑区功能连接(FC)数量变化
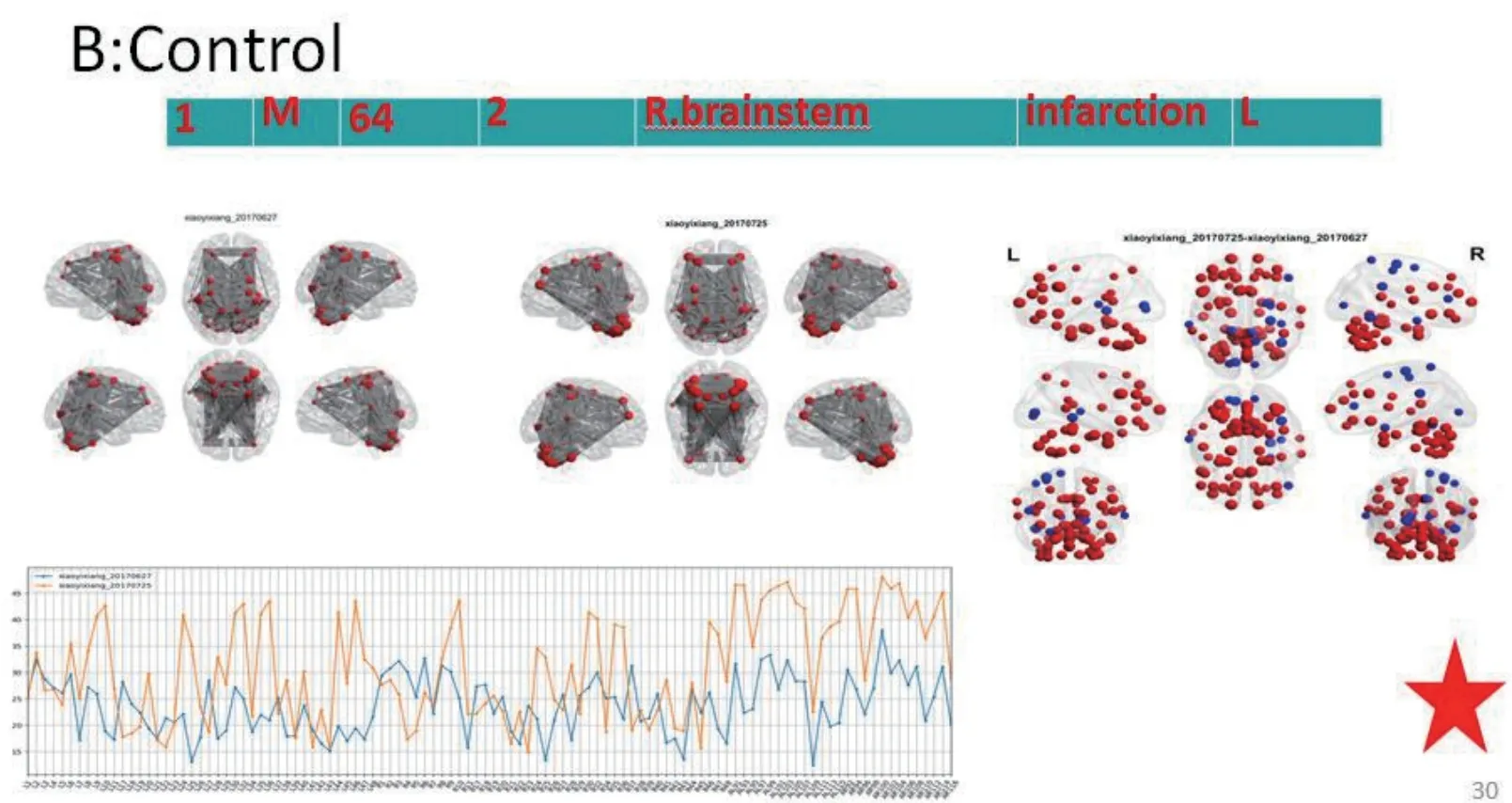
图7 常规训练前后脑区功能连接(FC)数量变化
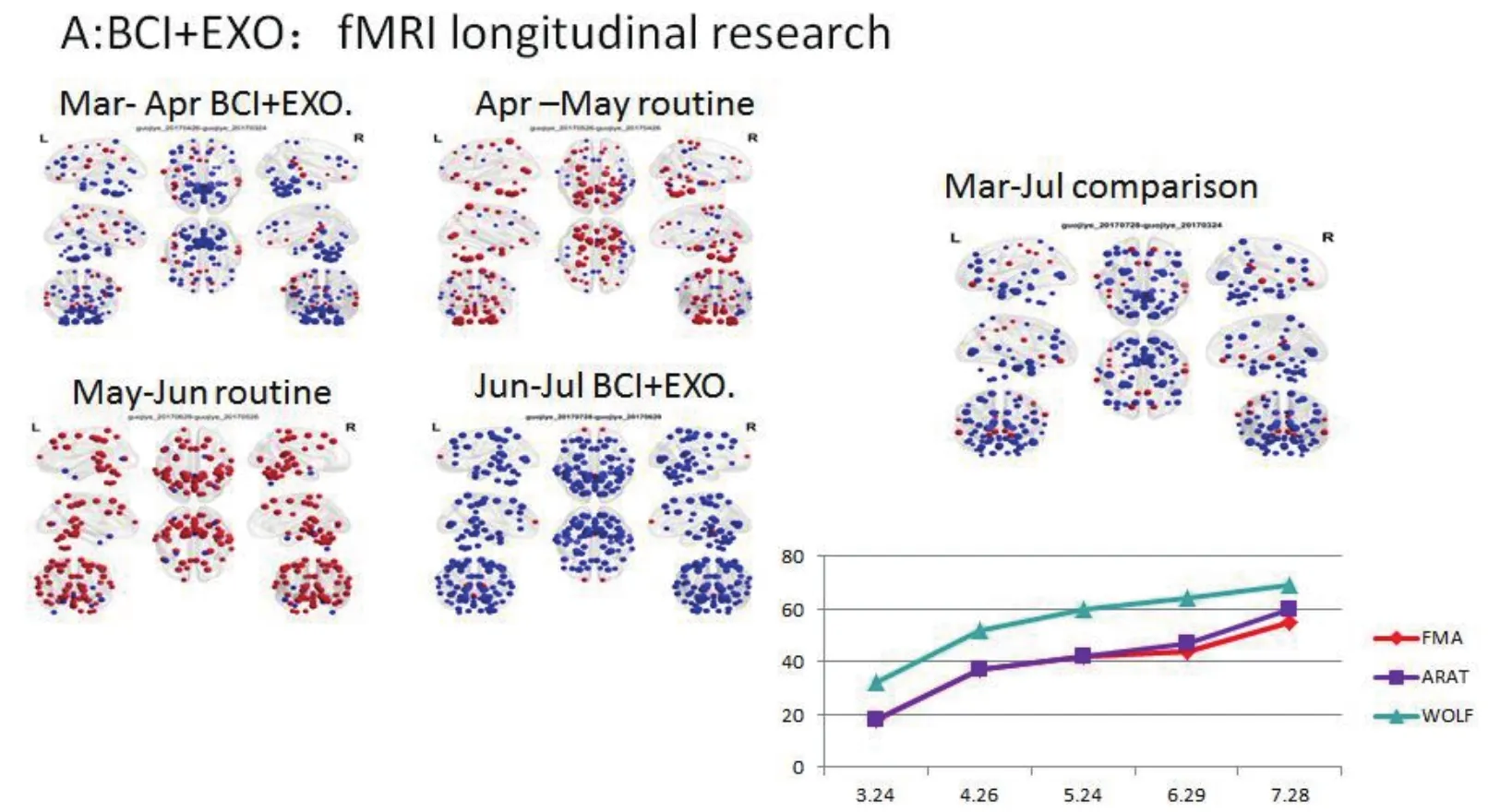
图8 反复BCI+EXO训练后的脑区功能连接(FC)数量变化
3.3 BCI+EXO训练可促进涵盖多感觉区的运动通路完整
经总结发现,BCI+EXO训练前后脑卒中患者的脑功能网络变化与临床评分之间有相关性,如视觉、听觉、感觉、等脑区变化与临床评分显著相关。
3.4 肌束的弹性系数比较
经7名脑瘫儿童6周被动拉伸和主动运动综合(BCI+EXO)训练后发现,其肌束长度增加(比目鱼肌(SOL):8%,P=0.018;腓肠内侧(GM):3%,P=0.018),羽状角降低(SOL:10%,P=0.028;GM:5%,P=0.028),束状僵硬度降低(SOL:42.17%,P=0.128;GM:21%,P=0.018),肌腱长度减少(6%,P=0.018),跟腱肌腱僵硬度增加(32%,P=0.018),杨氏模量增加(20%,P=0.018)。如图9所述:
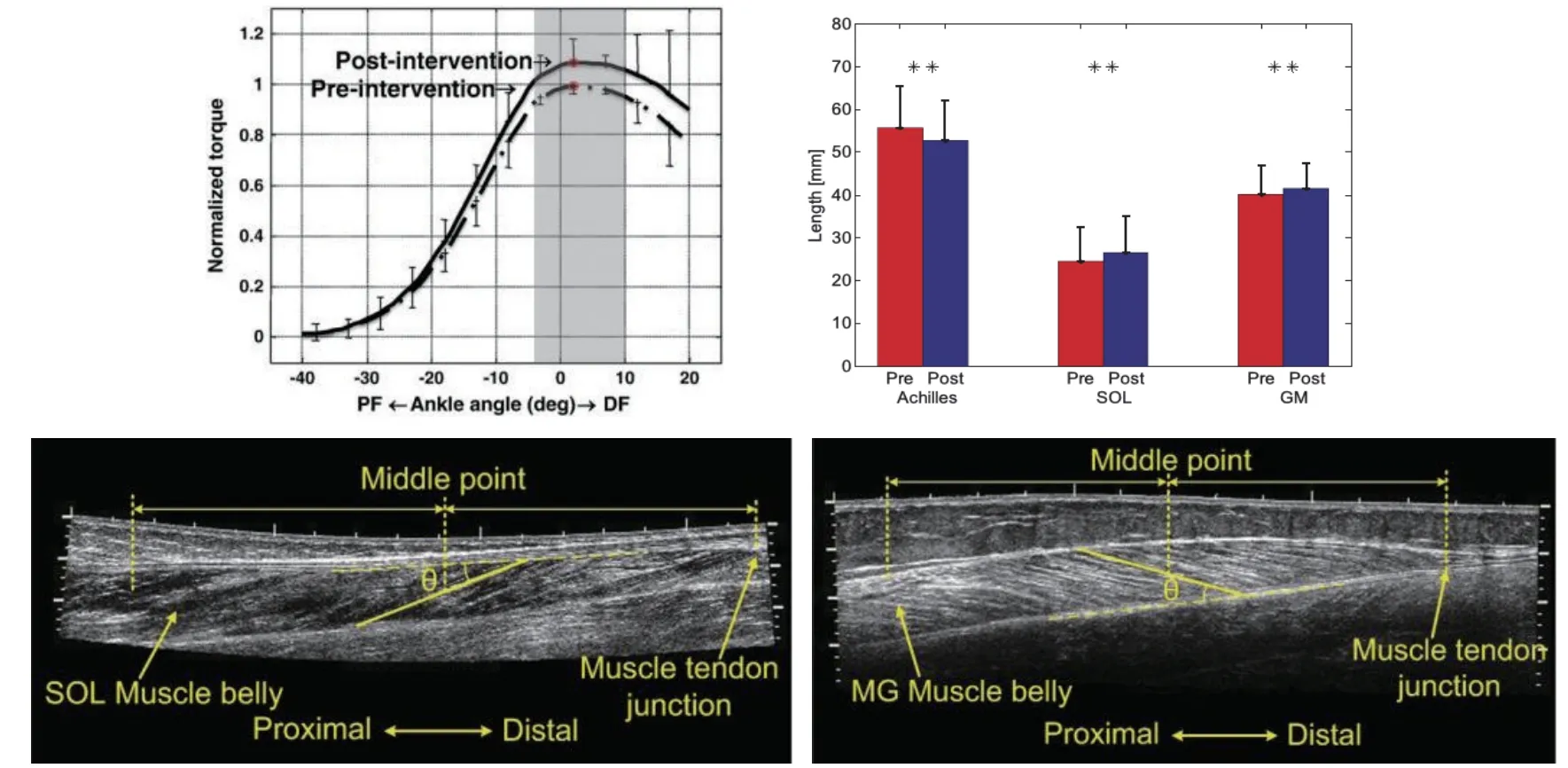
图9 跟腱肌腱的生物力学特征实验曲线
3.5 下肢选择性控制能力评估和功能性结果测量
如图10所述,经柔性被动和主动互动训练控制技术观测的小儿平衡量表(PBS)6分钟行走、定时上升(Timed Up-and- Go)、被动运动范围(PROM)及主动运动范围(AROM)等指标发现(训练6周)。实验发现,PROM、AROM和屈曲、背屈肌肉的剂量均显著递增(P分别=0.002、0.020、0.001,P<0.05),脚踝肌肉痉挛显著减少(P=0.01),选择性神经控制显著改善(P=0.005);下肢功能平衡性显著改善(P=0.0025),且6分钟内步行距离增加(P=0.025)。
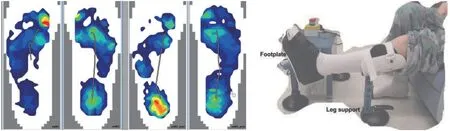
图10 下肢选择性控制能力评估与功能项结果测量
结论,经3.4、3.5实验总结来看,被动拉伸与主动运动相结合的训练方式在此次试验中对脑瘫儿童的关节生物力学特性、神经控制能力和平衡行走功能有显著促进效果。
4 结论
综上所述,目前运动性损伤康复以人工为主,辅以单一的、局部的康复训练器材或辅以物理疗法,而针对全身甚至耦合多种康复治疗手段的训练器械未见报道。全身康复及多种手段耦合一体化的康复是将人体作为一个整体进行训练,将提高康复效率,提升康复效果,是运动性损伤康复的新理念。本课题基于这一新理念,结合2022冬奥会冰雪运动的康复训练需求开展针对全身的、多功能模块集成的、耦合多种康复增强物理疗法的运动性损伤康复专业机器人研究,相关产品国内外未见报道,具有技术创新性。研究成果将提升康复效率,使运动员快速恢复运动能力,对更好保障2022冬奥会和冬残奥会的高质量、高水平有益。
