飞行器空气舵系统的高效刚度分配优化方法研究*
2022-10-29施松浩黄锐唐念华刘博
施松浩 黄锐† 唐念华 刘博
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)(2.中国运载火箭技术研究院,北京 100076)
引言
空气舵系统是最具有代表性的飞行器执行机构,空气舵系统动力学性能的好坏,不仅影响飞行过程中结构本身的安全性能好坏,对飞行器控制精度的高低也起到了很大的作用[1-3].
空气舵系统机械部分一般由伺服作动器、连杆、摇臂、舵轴、舵面等部件构成,这些子结构的刚度共同构成了空气舵系统的整体刚度,且有着不同程度的贡献[4].单个部件的刚度分析与优化设计技术已经随着有限元软件的普及变得十分成熟[5-7].对于多体结构,Feng Xiong等[8]针对汽车部件的刚度优化研究了以有限元建模为基础,径向基函数、多目标粒子群优化算法和修正灰色关联分析相结合的优化方法,李峰等[9]针对机械臂结构建立力学模型,利用迭代法对其刚度参数进行优化.但是针对空气舵的整体刚度优化的研究目前还比较薄弱,主要还是依赖工程经验,缺少一种高效、准确的刚度优化方法.在适当的约束条件下,合理的整体刚度分配不仅能优化空气舵系统的动力学特性,还能实现整体重量的优化,这是单个零部件刚度优化无法替代的重要环节[10,11].
要实现空气舵系统整体刚度的分配优化,需要综合考虑子结构对整体刚度的影响.在考虑空气舵系统结构质量不变等指标约束时,提高整体刚度,往往需要提高或者降低不同子结构的刚度,这样就会产生非常多的组合,而且很难研究出何种趋势的组合是最优解.如果考虑所有的可行解,十分费时费力,若计算整体刚度的方法也不够高效或是不能兼顾子结构的优化参数,刚度分配优化就几乎不可能实现.多体系统传递矩阵法[12-14]是将元件用包含其力学特性的传递矩阵进行连接以实现多体动力学建模的方法,具有计算高效且易于修改子结构参数的特点.遗传算法是模拟达尔文的生物进化理论以求得满足要求的最优解的一种成熟优化方法[15-17].这两者的结合成为实现高效的刚度分配优化的可行方法[18].本文研究了一种基于多体系统传递矩阵法和遗传算法相结合的刚度分配优化方法,对空气舵系统进行了高效建模及灵敏度分析,并结合遗传算法,将多体系统传递矩阵法建模的程序作为适应度函数进行空气舵系统的刚度分配优化.
1 空气舵系统的高效刚度分配优化方法
1.1 空气舵系统描述及力学简化
如图1所示,空气舵系统是一个复杂的多刚-柔耦合系统,主要由伺服作动器、连杆、摇臂、舵轴、舵面组成.伺服作动器在接收到控制指令后,通过连杆带动摇臂转动,并通过舵轴带动空气舵偏转.
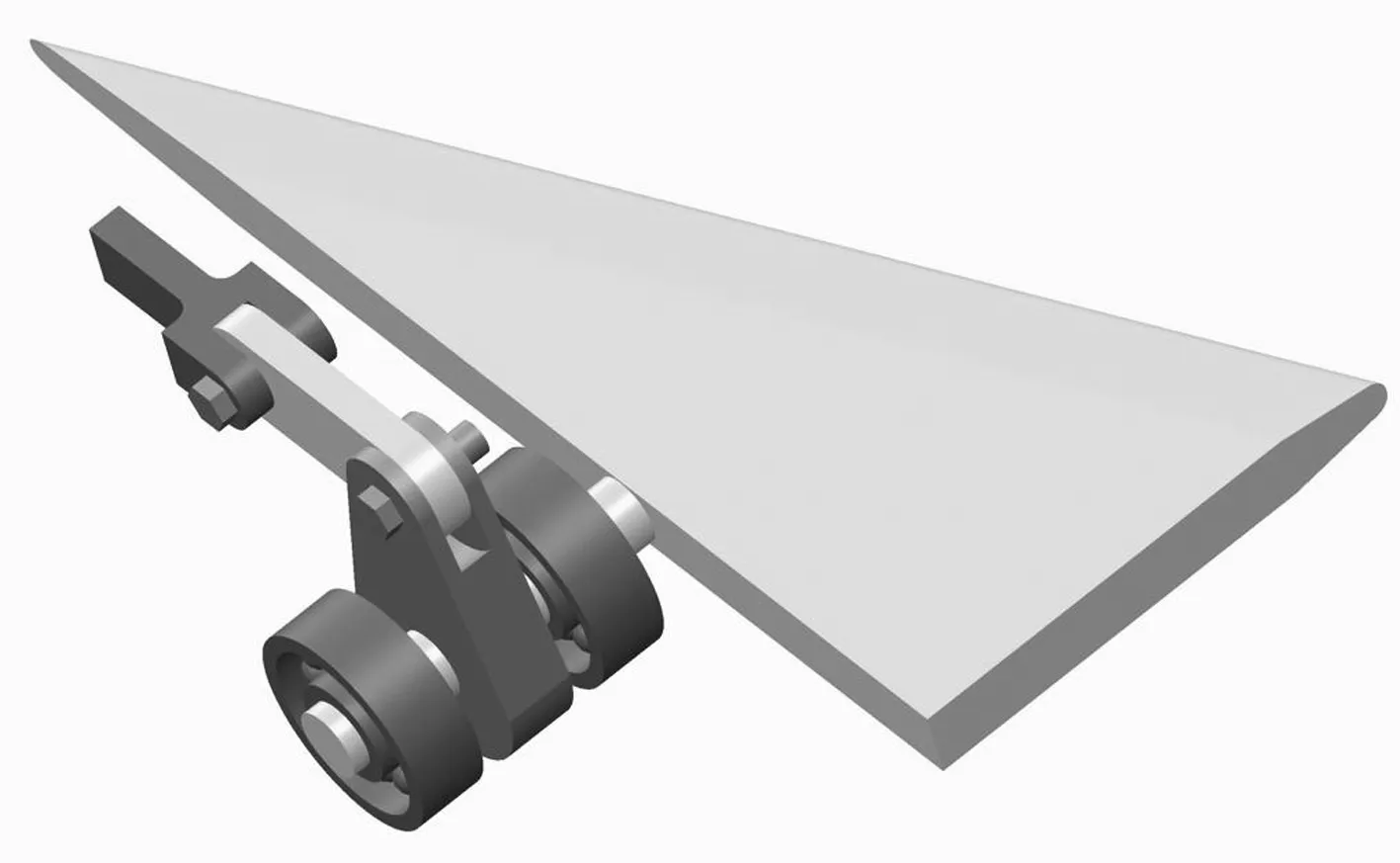
图1 空气舵系统装配体模型Fig.1 The assembly model of air rudder system
根据子结构组成与传动关系,建立了如图2所示的舵系统动力学模型.元件1为伺服作动器推杆,元件3为连杆,处理为考虑横向和轴向振动的Euler-Bernoulli梁,元件2和4为铰链,元件6为舵轴,处理为扭转振动的杆,元件5为摇臂,元件7为舵面,摇臂和舵面形状不规则,为方便简化,仅考虑其质量、重心、尺寸以及绕z轴的转动惯量,所以处理为刚体.状态矢量z用于定义一个点的力学状态,包括该点的位移与内力,表示为U,其中的元素分别对应于该点的x方向的位移、y方向的位移,绕z轴的转角、绕z轴的力矩、x方向的剪力、y方向的剪力,传递方向是从作动器传递到舵面,元件1左边设置为固支,元件7右边设置为铰支,模拟轴承的作用,所建模型用于研究空气舵的俯仰模态.把多体系统分解成许多易于矩阵形式表达的简单力学特征元件即传递矩阵U,将传递矩阵按照状态矢量传递方向组装在一起可得到整个系统的力学特征,用总传递方程表示为
Z7,0=UallZ1,0
(1)
Uall=U7U6U5U4U3U2U1
(2)

图2 空气舵系统动力学模型Fig.2 The dynamical model of air rudder system
1.2 基于多体系统传递矩阵法的高效结构动力学建模
考虑横向和轴向振动的Euler-Bernoulli梁的传递矩阵为UB,具体形式参见文献[12].
所以作动器的传递矩阵U1为
U1=UB
(3)
连杆有转动,需要加上坐标变换矩阵
(4)
式中,θ为连杆转动的角度.所以连杆的传递矩阵U3为
U3=RTUBR
(5)
舵轴为等截面无质量扭转振动弹性轴,传递矩阵为
(6)
式中,GJ为轴的扭转刚度,l为该轴的长度,x表示该轴的局部坐标系中x轴的坐标,方向沿舵轴轴向.摇臂和舵面为一端输入、一端输出的刚体,传递矩阵为UR,具体形式参见文献[12].所以摇臂和舵面的传递矩阵为
U5=U7=UR
(7)
铰链的传递矩阵为
(8)

1.3 高效刚度分配优化算法
空气舵系统的刚度分配优化流程如图3所示,将空气舵系统分解为五个子结构,提取影响整体刚度的参数,选择将作动器的半径、连杆截面的宽和高、舵轴的半径作为变量.
遗传算法[19]主要包含适应度函数、基因、染色体、个体、种群、选择、交叉、变异等要素.选择合适的种群数量和遗传代数,然后通过种群初始化、选择、交叉、变异等一系列操作,优胜劣汰,最终寻找到最优的个体.将空气舵系统子结构的尺寸变量作为遗传算法的表现型基因,利用遗传算法寻找最优的刚度分配个体.
在遗传算法中,使用适应度这个概念来度量群体中各个个体在优化计算中能达到或接近于或有助于找到最优解的优良程度,评价个体适应度的一般过程如下:(1)对个体编码串进行解码处理后,可得到个体的表现型.(2)由个体的表现型可计算出对应个体的目标函数值.(3)根据最优化问题的类型,由目标函数值按一定的转换规则求出个体的适应度.基于多体系统传递矩阵法的动力学建模将影响空气舵动力学特性的各个参数即个体的表现型包含在了里面,且可以非常方便地通过调整这些参数快速地计算出空气舵系统的固有频率,而刚度分配优化的目的,就是提高系统的第一阶俯仰模态固有频率,所以这里选择将空气舵传递矩阵法固有频率的计算程序编程为适应度函数,将空气舵系统的第一阶俯仰模态固有频率高低作为适应度的评判标准,适应度高的个体将有更高概率遗传到下一代.初始种群在经过设定好的遗传代数的适应度选择后,最终找到适应度最高的一组刚度分配方案.由于固有频率与各个尺寸多呈正相关或负相关性,所以对整个舵系统的质量进行适当约束,以求在不超过一定质量标准的情况下,寻找到最优的刚度分配方案.

图3 刚度分配优化流程Fig.3 The process of stiffness allocation optimization
2 空气舵系统刚度优化算例验证
2.1 空气舵系统等效结构动力学分析
根据式(1)~式(8)可以写出舵系统总传递矩阵
(9)
令边界条件
(10)
代入(9)式,得
(11)
要使(11)式有非零解,则有
(12)

由求得的固有频率可以得到其对应的系统边界点的状态矢量,再将求到的固有频率代入每个部件的传递矩阵Ui即可得到所有的传递矩阵,其他连接点的状态矢量就可通过下式得到
(13)
弹性梁上任意点处的状态矢量为
Zi,xi=Ui,xiZi-1,i(i=1,3,5)
(14)
系统的振型由各点的状态矢量确定,本文建立的模型用于研究空气舵的俯仰模态,所以选用Θz方向确定.
空气舵系统的固有频率计算采用的方法是搜根方法[20],结果如图4所示,横坐标为固有频率,纵坐标表示|Δ|值的大小,当|Δ|值接近于0时即可求出固有频率.由多体系统传递矩阵法算得舵系统第一阶固有模态频率为139.57Hz.振型如图5所示,其中横坐标是各个连接点到作动器固定端的x方向的距离,纵坐标是Θz角度,由于摇臂沿y轴建立,舵轴沿z轴建立,输入点与输出点在x轴上位置相同,因此在图5中从摇臂开始的部件都在连杆末端一点处,该点处由于舵轴的加入Θz显著增大,可以看出第一阶固有模态为俯仰模态.用MSC.Patran软件对舵系统进行有限元建模,图6为计算得出的第一阶俯仰模态,频率为141.06Hz,与多体系统传递矩阵法算得的频率误差仅为1.06%,证明了传递矩阵法对空气舵系统建模的正确性.商用有限元软件计算需要10min,而传递矩阵法建模计算一次仅需0.12min,计算效率比直接有限元模拟提高约2个数量级,有利于后续优化的实现.
2.2 灵敏度分析
基于传递矩阵法进行舵系统动力学特性计算,可以方便地调整舵系统中的各部件的参数,并且能快速计算出大量样本,以便研究参数对舵系统的振动特性的影响.制造空气舵系统的材料往往是确定的且不方便更改,所以对于刚度的控制,可以通过改变子结构的尺寸来实现.图7是通过改变舵系统子结构的尺寸进行的灵敏度分析,图中横坐标是尺寸变化量,纵坐标是固有频率.图(a)包含舵轴,图(b)不包含舵轴,可以看出,舵轴半径的改变对结构整体的刚度影响最为明显,连杆高度的影响最小.

图4 固有频率计算结果 Fig.4 The calculation result of natural frequency

图5 空气舵Θz方向振型Fig.5 The Θz mode shape of air rudder

图6 空气舵有限元计算结果Fig.6 The finite element result of air rudder
2.3 刚度分配优化
在对系统总质量进行约束的情况下,每一代最优个体的固有频率如图8所示,舵系统第一阶俯仰模态固有频率由原来的139.57Hz提升为161.61Hz,优化效果十分显著.每一代最优个体的各个尺寸如图9所示,各部件的尺寸有一定波动,但基本围绕一个数据,此数据即最优尺寸.根据灵敏度分析,舵轴半径对于整体刚度的影响最大,优化过程中,也是舵轴半径最先达到尺寸的上限,而连杆高度对整体刚度影响最小,主要用于平衡质量的约束条件,所以最晚趋于稳定,优化结果具体参考表1.

(a)包含舵轴半径的灵敏度分析(a)The sensitivity analysis including the radius of rudder shaft

图8 固有频率优化结果Fig.8 The optimization result of natural frequency
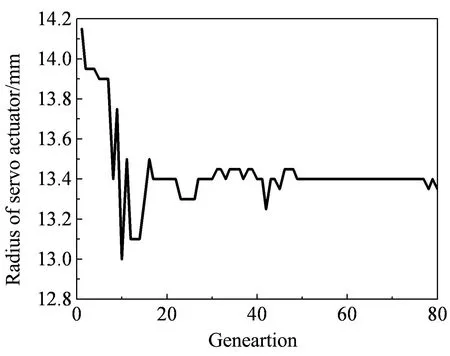
(a)作动器半径优化过程(a)The optimization process of the radius of servo actuator

表1 优化结果对比Table 1 Comparison of optimization results
3 结论
本文针对空气舵结构设计存在的刚度分配优化问题提出了一种多体系统传递矩阵法与遗传算法相结合的高效优化方法.以典型的空气舵系统为对象,利用多体系统传递矩阵法对空气舵系统进行建模并程序化,以实现快速计算舵系统的固有频率与振型,研究各个子结构对整体刚度的贡献的目的.将传递矩阵法建模程序作为适应度函数,运用遗传算法在约束整体质量的情况下对各个子结构的刚度分配进行优化,空气舵系统第一阶俯仰模态固有频率得到了显著提升.
