基于改进的模型参考自适应的飞行控制律设计
2022-10-27邬正堃屈晓瑜
邬正堃,屈晓瑜
(中国航天科工集团第六研究院二一〇所,陕西西安 710018)
引言
提高飞行控制器的鲁棒性是科研工作者们一直追求的目标。基于常规的比例积分微分(proportion integration differentiation,PID)控制算法设计的飞行控制算法虽然理论简单易实现,并且鲁棒性比较好,但PID 控制方法结构和参数固定,因而在复杂的飞行环境下,可能无法保证飞机达到期望的动态性能,进而降低飞行器的飞行品质。
随着现代控制的发展,自适应控制的提出和发展对提高飞行控制系统在复杂环境下的鲁棒性有着很大的帮助。文献[1]将模型参考自适应控制与BP 神经网络结合,设计了航天器的姿态控制器,实现了航天器攻角的自适应控制。文献[2]基于模型参考自适应控制设计了四旋翼的姿态容错控制,实现了四旋翼在扰动存在和执行机构故障下的姿态角跟踪。此外,文献[3]开展了基于模型参考自适应的直升机悬停控制,实现了直升机姿态的满意控制。除此之外,模型参考自适应控制还被应用于柴油机转速控制[4]、导弹控制[5]以及大侧滑角飞行控制[6]等场景中。
飞行控制具有飞行包线范围大、扰动复杂等特点。考虑到常规模型参考自适应控制本质是仍是线性控制器,因而在飞行状态大范围初值变化情况下会出现性能降级的问题。鉴于此,本研究对常规模型参考自适应控制进行了改进,以拓宽其适用性。并且在初始飞行状态变化和参数拉偏扰动下对基于改进模型参考自适应飞行控制律的鲁棒性和控制性能进行验证。
1 模型分析和相关假设
在扰动影响下,被控对象的非线性微分方程可写为

为了后续研究,这里对系统做出以下几个必要的假设:
假设1(维数假设):系统是完全驱动系统,并且系统的输出量为状态量,即n=m=l。
假设2(可控性假设):系统的控制矩阵G(x)的逆存在。

假设5(系统控制效能矩阵部分已知):系统的控制效能矩阵假设为符号已知的对角矩阵。
2 基于改进的模型参考自适应控制
从结构上来看,传统模型参考自适应控制由被控对象、参考模型、自适应律以及控制律四个部分组成。其中,参考模型作为系统的参照,具有被控对象期望的动态;自适应律则是根据被控对象和参考模型之间的误差估计出扰动参数,控制律则是根据估计出的扰动来消除被控对象的扰动影响,最终保证被控对象的响应跟踪上参考模型动态。
但从形式上来看,传统参考模型实质上仍是线性控制器。从飞行控制角度来看,传统模型参考自适应控制器具有以下几个缺陷:
(1) 单个控制器适用范围有限,在初始状态变化较大的情况下会出现控制性能降级;
(2) 在整个包线内,传统模型参考自适应控制器需要设计多个参考模型,因此,该控制器的通用性不足。
为了消除上述模型参考自适应控制器中的不足,本文借鉴文献[7],对基于参考模型的自适应控制进行改进。改进后的参考模型自适应控制器的结构不变,具体设计如下控制律设计为


在自适应律中,Γ 表示自适应增益,这与系统扰动估计速率相关,Γ 越大,自适应律估计速率越快;相反,Γ 越小,自适应律估计速率越小。过高的 Γ容易导致系统振荡,因此实际选择增益的过程中应兼顾系统的快速性和瞬态性能。
从控制律(3)和参考模型(4)的形式来看,改进后的模型参考自适应控制系统是非线性的,与系统的动态和控制矩阵有关。单个控制器适用于整个飞行包线内,并且控制器参数较少,通用性强,很好地弥补了常规模型参考自适应控制的缺陷。
3 稳定性分析
本小节在Lyapunov 稳定性要求下,证明了改进后的模型参考自适应控制器对扰动的鲁棒性。
选取Lyapunov 函数

结合状态误差、自适应估计误差的定义,上式可进一步写成

4 飞行控制律设计
以典型三翼面飞机为研究对象,飞机的操纵舵面包括左右升降舵(δel,δer)、左右副翼(δal,δar)和方向舵( δr)。
根据牛顿第二定律,飞机所受的力矩可以建模成以下形式

其中

根据第2 节中参考模型(4),自适应律(5)和控制器(3),可以设计出基于改进的模型参考自适应的飞行控制律。控制器中参数选取如下

5 仿真验证
本小节主要对所设计的基于改进的模型参考自适应飞行控制律进行验证。
为了突出控制效果,选取常规模型参考自适应控制作为对照组。在高度2 000 m,速度100 m/s 的平飞状态下设计模型参考飞行控制律。
在高度5 000m,速度150 m/s 的平飞状态下对比以上两种控制方法。给飞机俯仰和滚转角度阶跃指令,期间偏航角速度保持为零。12 s 时飞机静稳定导数突变20%,对比结果,见图1~图6。

图1 滚转角速度对比图
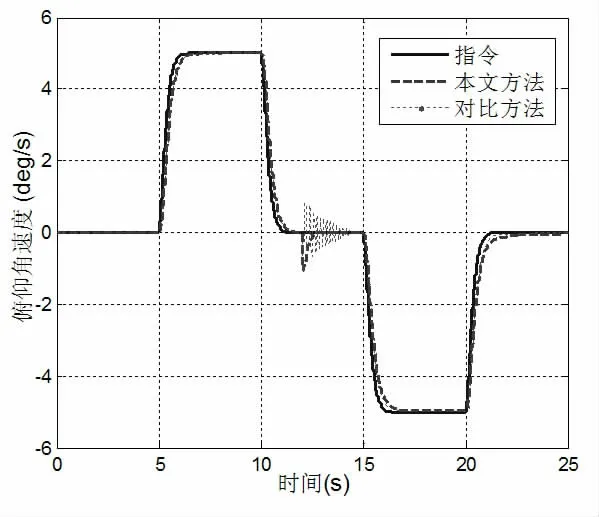
图2 俯仰角速度对比图

图3 偏航角速度对比图

图4 升降舵对比图

图5 副翼对比图

图6 方向舵对比图
从对比结果能够看出,基于改进的模型参考自适应飞行控制律动态和稳态性能都优于传统模型参考自适应控制,并且在参数拉偏的干扰下能够保证飞控系统的性能不降级,角速度并未出现震荡,依旧实现期望动态。因此,本研究提出的方法适用范围较传统模型参考自适应控制有明显提升。
6 结论
本研究提出一种基于模型参考自适应控制方法,并应用于飞行控制律设计。改进后的模型参考自适应控制克服了传统模型参考自适应控制因初始状态变化导致的性能降级问题。因而,适用范围更大。并且改进后的方法设计的流程更加简单。数字对比仿真验证了理论分析。结果表明基于本研究提出方法设计的飞行控制律能够克服参数拉偏干扰,并且能够保证飞机动态性能和稳定性达到预期。本研究对提高飞行控制律鲁棒性做出了一定贡献。
