含AFS/DYC主动分配优化的4WID-EV横向稳定性控制策略
2022-10-12陈建锋叶贻财汤传业
陈建锋,叶贻财,吴 强,汤传业,王 鹏
(1.江苏大学 汽车工程研究院, 江苏 镇江 212013;2.常州工学院 电气信息工程学院, 江苏 常州 213032)
0 引言
四轮独立驱动电动汽车(four wheel independent drive electric vehicle,4WID-EV)将轮毂电机集成到车轮内部,其工作效率取决于轮毂电机的输出转矩和转速[1-3]。这种结构通过调整车辆行驶过程中的需求转矩来提高轮毂电机的效率,能够在保证横向稳定性的同时改善汽车的经济性。
考虑到轮毂电机的独立控制能力,近年来出现了多种级联控制结构[4]。Goodarzi等[5]提出了多层次车辆动态控制系统,在上层控制器中基于最优理论获得期望的附加横摆力矩和总驱动力,通过下层控制器实现轮毂电机扭矩的智能分配,在满足纵向控制独立性的前提下充分保障车辆的横向稳定性能。有学者利用Takagi-Sugeno(T-S)模糊模型处理车辆横向动力学中的非线性问题,设计了基于T-S模糊的鲁棒H∞输出反馈控制器以进一步提升控制系统的鲁棒性[6-7]。总体而言,现有的研究主要集中在控制器的研发,对下层转矩的分配规律涉及较少。
此外,传统的横向稳定性控制只能通过拓展受轮胎力学特性约束的控制策略来实现,其下层控制器必须配置电机扭矩以产生上层控制器期望的附加横摆力矩。Emirler等[8]提出一种集成横向稳定性控制和再生能量制动的横向稳定性控制策略。该策略能够改善车辆的侧向安全性能并降低能量损耗,但下层的Bang-Bang控制器需要修正制动扭矩以适应制动防抱死系统,难以满足期望的附加横摆力矩需求。有学者构建了以电机整体效率最优为目标的经济性扭矩分配策略,在实现车辆横向稳定性控制的同时提升了电机效率,但下层控制器中的扭矩分配仍然存在较强的约束,对电机效率的提升较为有限[9-10]。
为弱化轮毂电机扭矩分配的约束、有效提升电机工作的潜能,本文设计了一种考虑主动分配优化的4WID-EV横向稳定性控制策略。该策略整体方案为级联结构:在模型预测控制(model predictive control,MPC)的框架下,基于分配优化模型主动调节主动前轮转向(active front steering,AFS)和直接横摆力矩控制(direct yaw moment control,DYC),集成控制各部分工作区间的有效程度。
1 控制策略的结构
基于AFS/DYC主动分配优化的4WID-EV横向稳定性控制策略系统如图1所示,其中关键的子模块包括AFS/DYC上层控制器、协调变量L调节器以及下层控制器。区别于传统的AFS/DYC集成控制策略(下文简称:传统策略)[11],图1中的上层控制器能够在MPC框架下基于协调变量L主动对附加的横摆力矩进行优化,使电机工作在高效区间。下层控制器分配电机扭矩以满足驾驶员需求扭矩Tr并生成附加横摆力矩ΔM(L)。使用该策略,可以在保证系统横向稳定性的同时提升电机的效率,改善4WID-EV的经济性能。
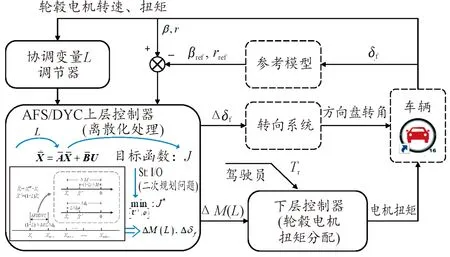
图1 横向稳定性控制策略系统示意图
2 系统建模
2.1 车辆动力学模型
假设车辆在水平路面上行驶并忽略车辆悬架、转向系统及空气阻力等的影响,可得图2所示的单轨车辆模型[6]。此时车辆的侧向和横摆运动可表示为:
(1)
式中:m为整车质量;vy为侧向速度;vx为纵向速度;r为横摆角速度;Fyf、Fyr分别为前后轮的侧向力;ΔM为附加横摆力矩;Iz为车辆质心处绕z轴的转动惯量;lf、lr分别为质心到前、后轮中心的距离。
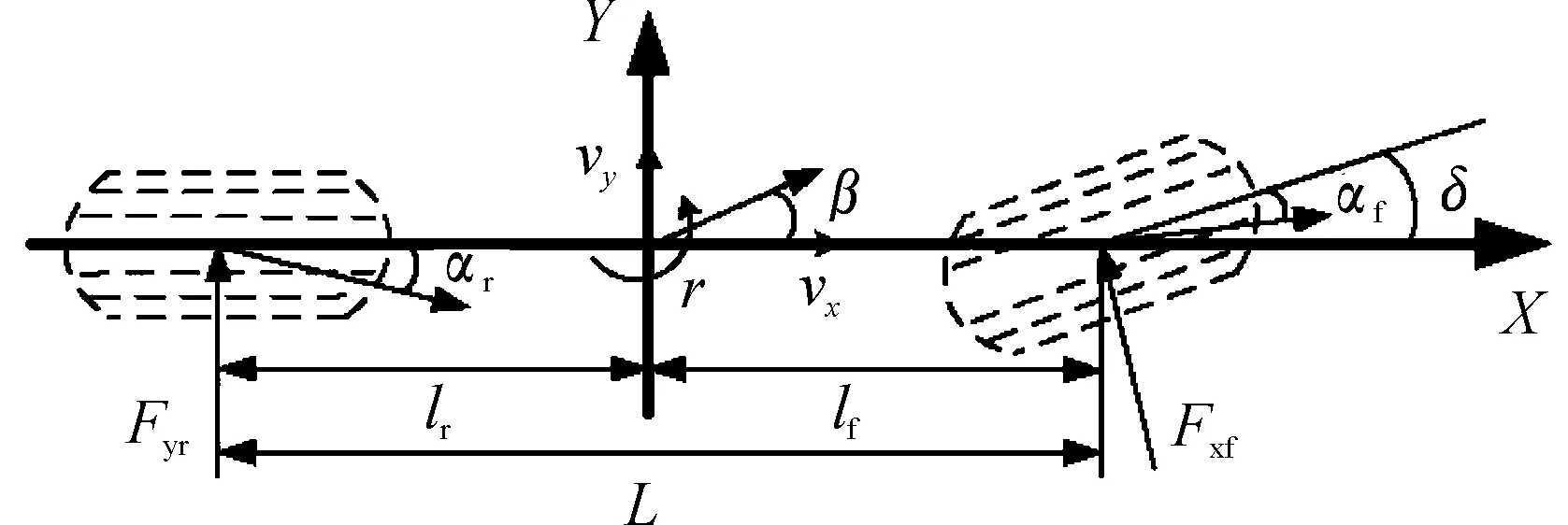
图2 单轨车辆模型示意图
假设侧向轮胎力为:
Fyf=Cfαf
Fyr=Crαr
(2)
式中:Cf、Cr分别为前、后轮的侧偏刚度;前、后轮的侧偏角αf、αr为:
(3)
式中:前轮转角δ=δf+Δδf,δf为驾驶员输入的前轮转向角;Δδf为主动前轮转向角。当纵向车速vx恒定时,前、后轮的侧偏角较小,车辆的动态可表示为:

(4)

2.2 主动分配优化方案
4WID-EV中,利用主动前轮转向角Δδf和附加横摆力矩ΔM能够实现对车辆质心侧偏角和横摆角速度的有效调节。轮毂电机扭矩的分配受ΔM的影响很大:基于电机产生的纵向力需生成ΔM。其中,AFS/DYC集成控制下各部分作用程度难以调节,由车辆动态方程获得的控制量U缺乏主动分配优化能力。

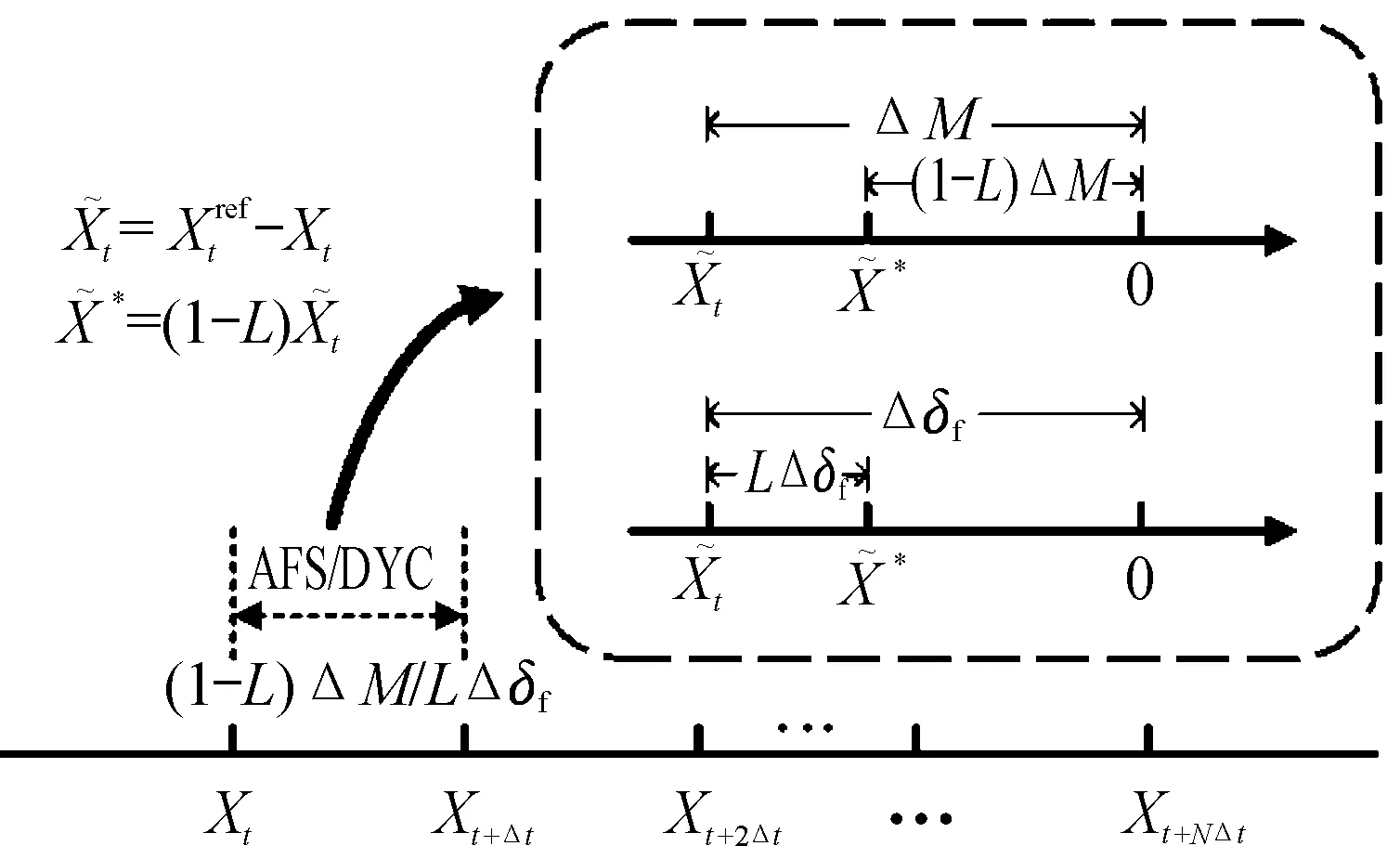
图3 主动分配优化方案示意图

(5)


(6)

3 控制器设计
采用MPC算法构造级联结构的控制器:上层控制器的主要任务是保证4WID-EV的横向稳定,即在主动分配优化方案、约束条件以及目标函数的基础上使系统的状态量收敛于参考值;下层控制器和协调变量L用于轮毂电机扭矩的分配,以实现效率最大化的控制目标。
3.1 参考模型
(7)
式中:Rl为道路转弯半径。考虑到βref较小,侧向稳定性控制的研究[12]中常取βref≈ 0。此外,侧向加速度常受限于轮胎-路面附着系数μ。当ay≤μg时,rref需满足如下条件[8]:
(8)
3.2 目标函数
为降低驾驶员转向控制的扰动作用,主动前轮转向角Δδf应满足:
MPC的最优控制问题可表述为在满足I/O约束的条件下,使车辆的运动状态跟踪参考模型的期望值,相应的目标函数J可表示为:
(10)
约束条件:
(11)
(12)

(13)

(14)
对于线性模型预测控制算法而言,目标函数的求解过程通常可转换为如下的二次规划问题[13]:
(15)
约束条件:
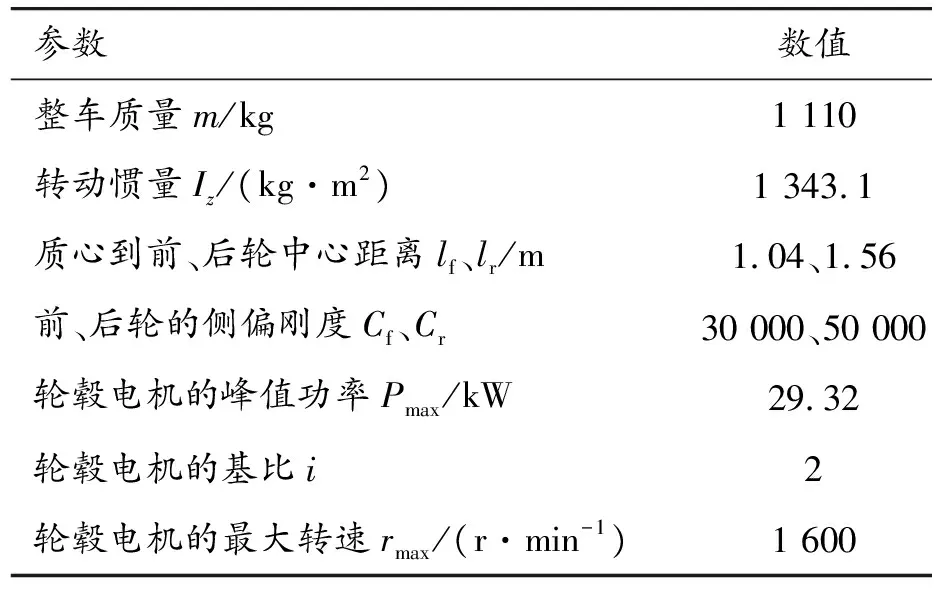
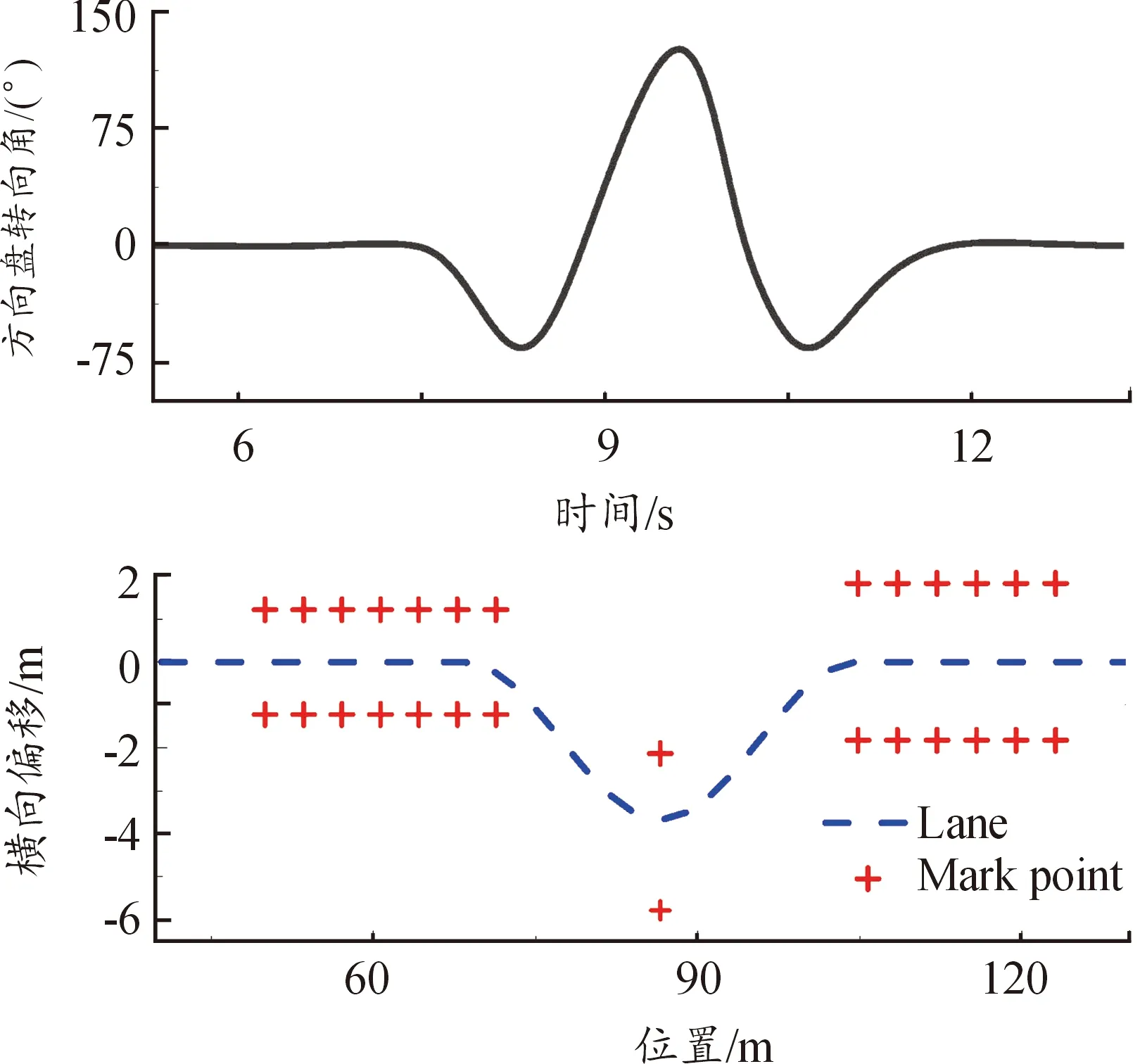
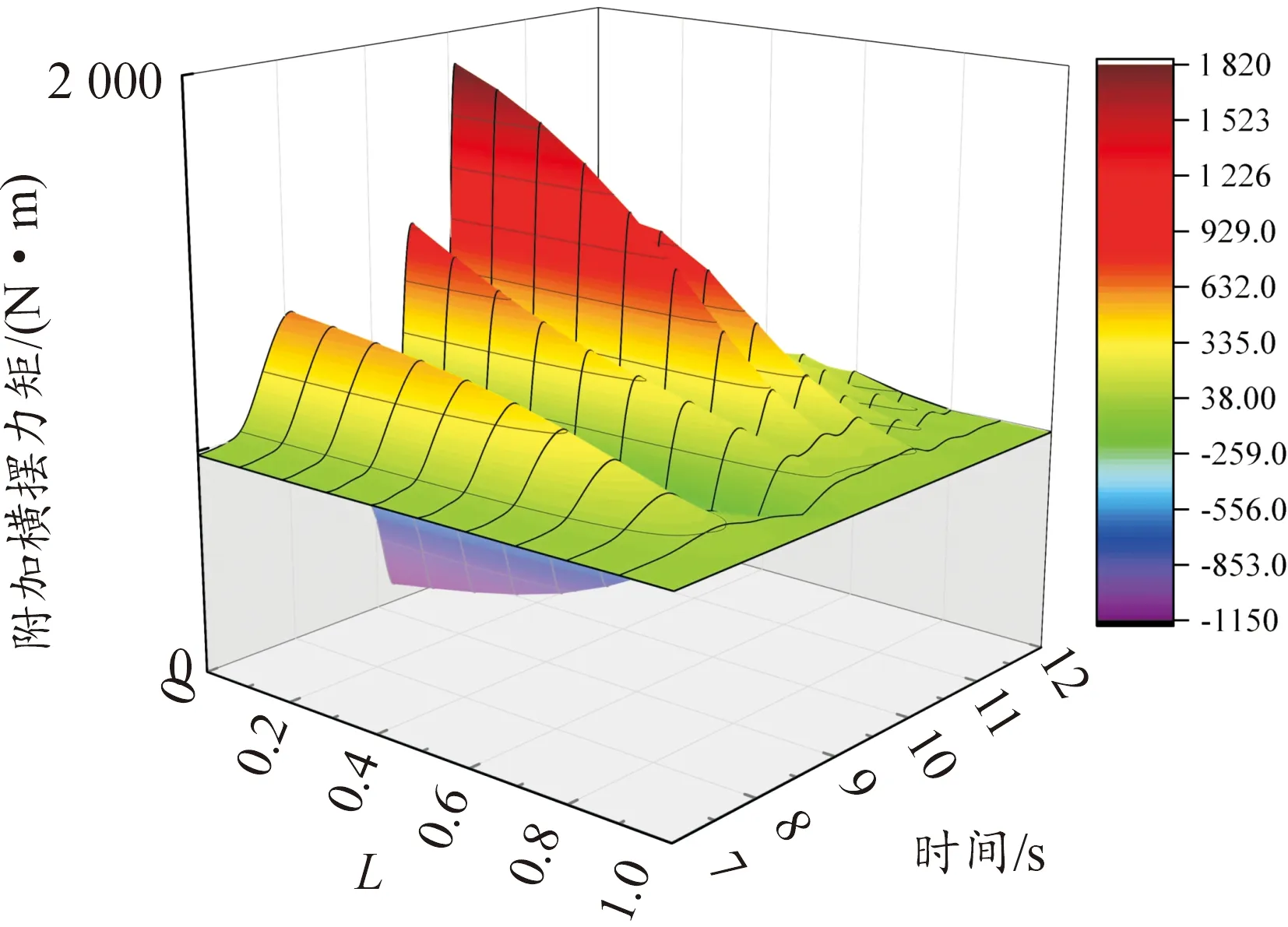
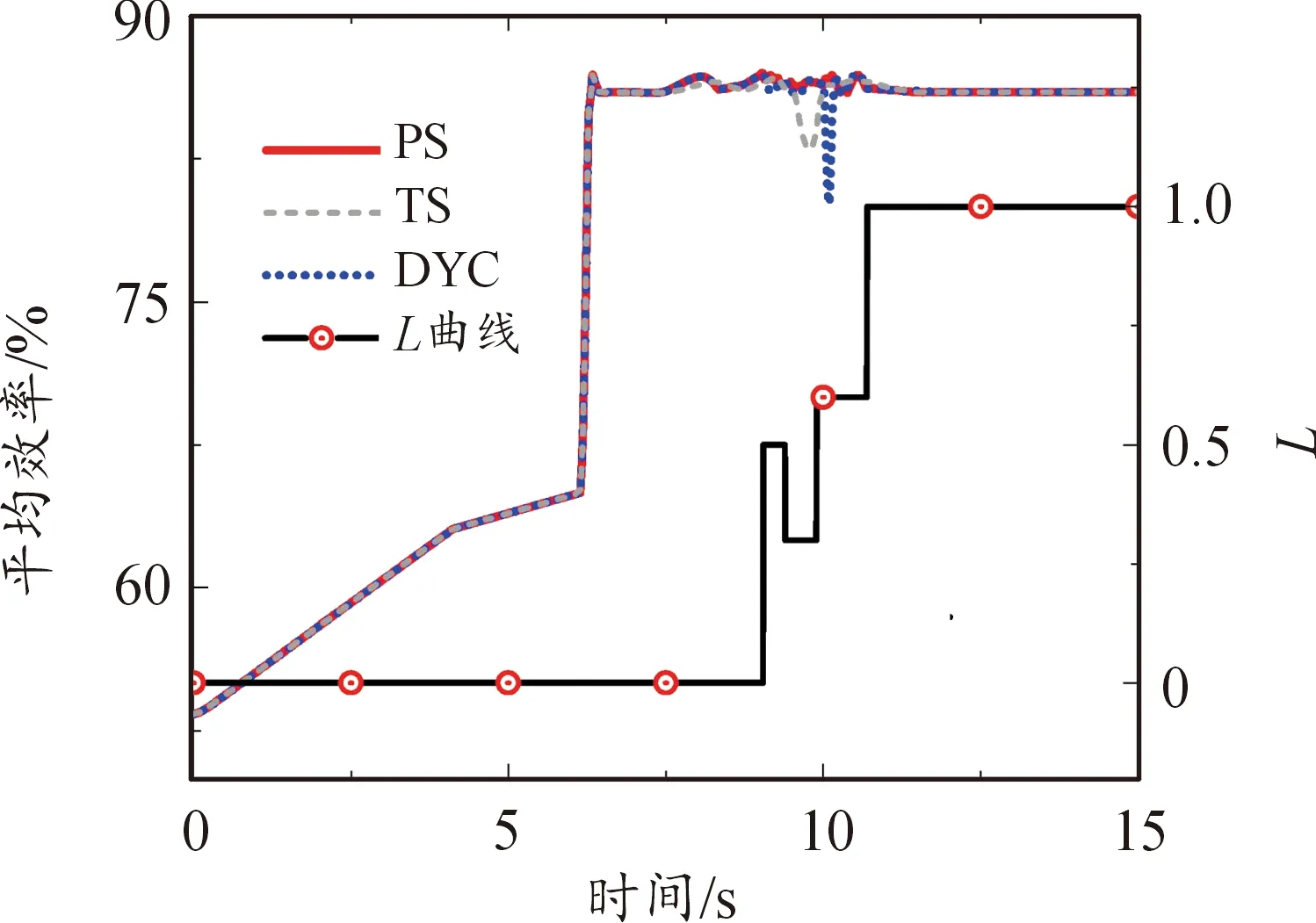
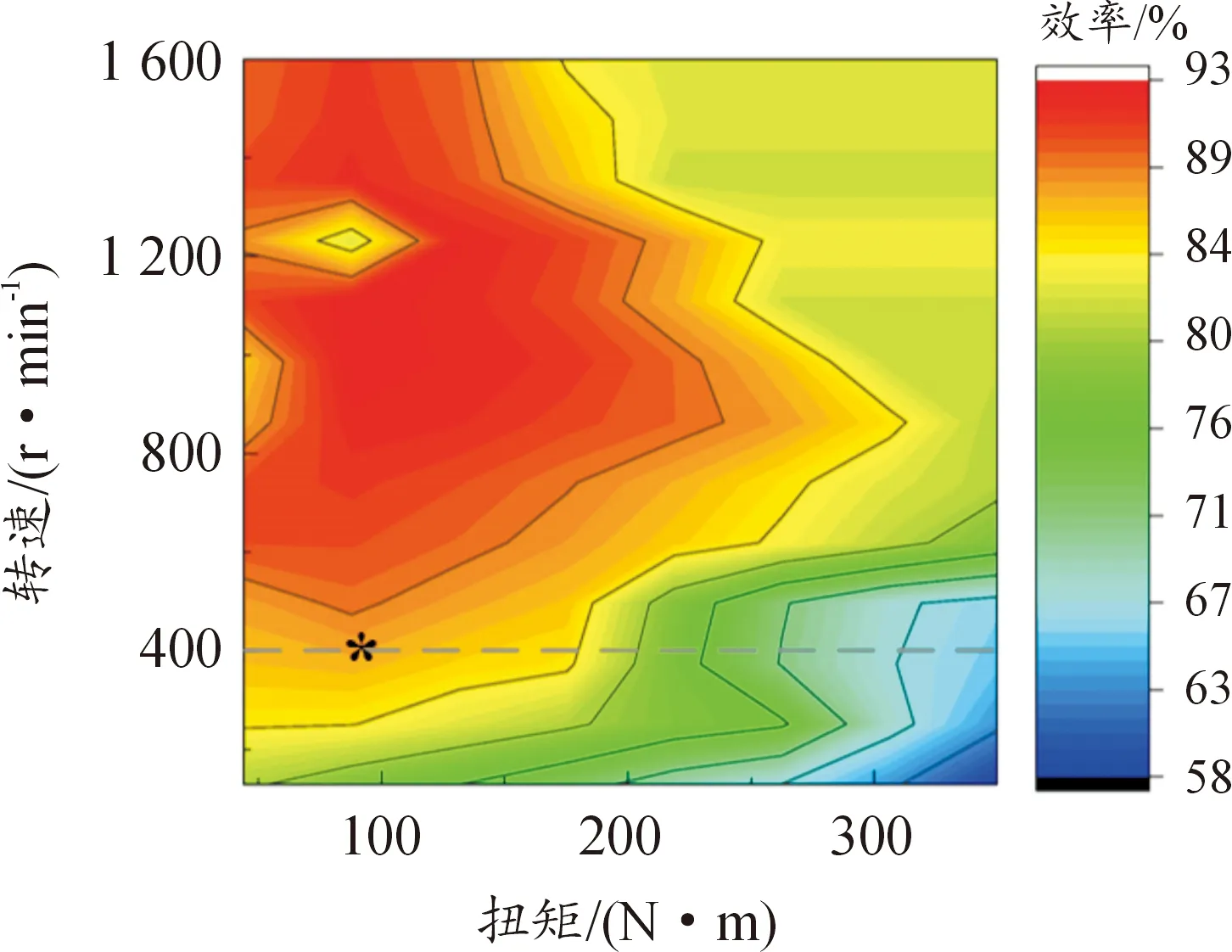
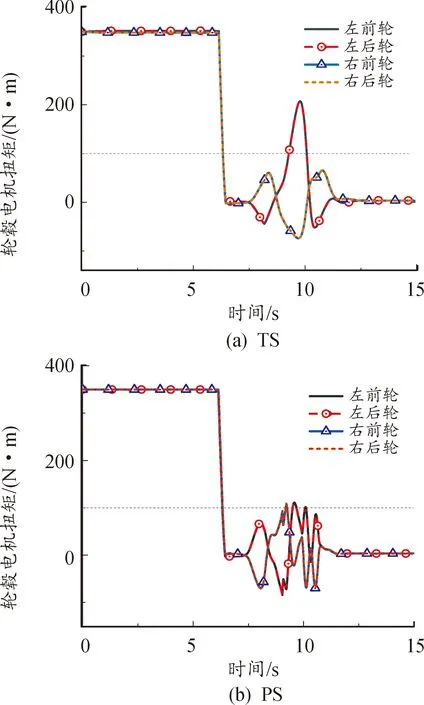
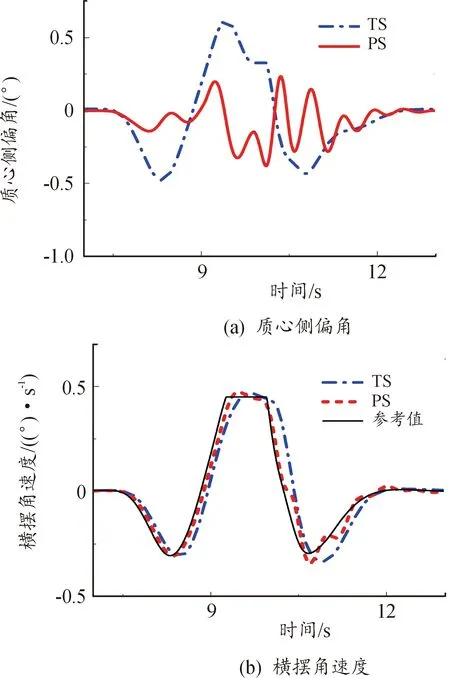
S[UT,φ]T Seq[UT,φ]T=beq lb<[UT,φ]T (16) 式中:H为正定矩阵,g为梯度向量,S、Seq为约束矩阵,b、beq、lb、ub为约束向量。 利用CarSim/Matlab环境搭建仿真平台,车辆的整车参数见表1,方向盘转角的变化如图4所示。双移线工况中,试验车的路线受限于标记点位。 为了简化分析,设定3种协调变量(L=0,0.5,1),纵向车速vx= 50 km/h,轮胎-路面附着系数μ=0.75。不同L值下的横摆角速度和质心侧偏角如图5所示,其中:PS表示本文提出的策略(proposed strategy),CS代表未施加横向稳定性控制的对比策略(contrast strategy)。 表1 整车参数 图4 方向盘转角的变化曲线以及试验车路线 由式(8)可知,受路面附着条件的制约,车辆横摆角速度的期望值|rref| ≤ 0.45 deg/s。图5(a)中的结果表明:除[9,10]s的范围外,车辆的横摆角速度都能较好地跟踪期望值,且剧烈工况下根据PS得到的横摆角速度更趋近于期望值。图5(b)中,CS作用下的车辆质心侧偏角与参考值βref=0 存在较大偏差:变化区间为[-1.3,0.4]deg,且在10.1 s处达到最大值-1.3 deg。此外,PS作用下,3种协调变量对应的车辆质心侧偏角的变化区间分别为[-0.5,0.4]deg、[-0.35,0.2]deg和[-0.3,0.2]deg。显然,DYC的有效工作区间随协调变量L的降低而不断增大,进而使输出的附加横摆力矩ΔM(L)增大以维持车身的稳定。在此过程中,系统的横向稳定性能不断增强,且L=0时的曲线整体上最接近βref。特别地,L=1时,受式(9)限制,仅AFS有效工作。这在很大程度上降低了控制器保障车辆横向稳定的能力。 需要指出的是,本文提出的主动分配优化方案使得AFS和DYC共同控制下各部分的有效程度是主动可调的。上层控制器输出的附加横摆力矩ΔM(L)对不同协调变量L的响应结果如图6所示:L=0时,ΔM是上层控制器输出的唯一控制量,此时AFS部分的主动前轮转向角Δδf为零,控制系统仅为传统的DYC;L=1时,DYC部分不起作用(ΔM=0),控制系统仅为传统的AFS;L∈ (0,1)时,ΔM随L的增大而减小。 图6 附加横摆力矩ΔM(L)对不同协调变量L的响应结果 在保证系统横向稳定的前提下,附加横摆力矩ΔM(L)与协调变量L之间的隐式关系在一定程度上削弱了下层控制器最优问题的约束强度,改善了电机扭矩分配。协调变量L及不同策略对应的轮毂电机平均效率如图7所示。在[9,10.5]s范围内,相较于不带主动分配优化的传统策略(traditional strategy,TS)和纯DYC策略,根据PS得到的4个轮毂电机平均效率的最小值可分别提高3.9%和7.2%。 图7 协调变量L及不同策略对应的轮毂电机平均效率曲线 分析图8轮毂电机效率MAP图发现:当前转速下高效率区域对应的扭矩约为100 N·m (效率MAP图中*标记)。进一步,分析PS和TS作用下的轮毂电机扭矩分配情况(见图9):[9,10.5]s范围内,由于PS中存在的协调变量L的作用,4个轮毂电机的扭矩趋近于100 N·m。 图8 轮毂电机效率MAP图 车辆的质心侧偏角和横摆角速度如图10所示。在协调变量L的作用下,PS对应的车辆质心侧偏角的变化区间为[-0.38,0.22]deg,明显小于TS的变化区间[-0.48,0.6]deg。当质心侧偏角较小时,车辆的航向角主要由横摆角速度决定。由于行驶路径受图4中的标记点位限制,车辆行驶的航向角基本相同,故图10(b)中的横摆角速度曲线形状相近。但是,TS对应的横摆角速度曲线在时间轴向偏离参考值的幅度更大。因此,采用PS能够获得更好的跟踪效果,即具有较好的横向稳定性能。 图9 轮毂电机扭矩变化曲线 图10 L作用下车辆质心侧偏角和横摆角速度曲线 本文提出一种基于AFS/DYC主动分配优化的4WID-EV横向稳定性控制策略。在MPC的框架下,利用主动分配优化方案构造的上层控制器使AFS/DYC集成系统各部分的有效程度主动可调。根据主动分配优化结果输出的附加横摆力矩ΔM(L),弱化了下层控制器中轮毂电机扭矩分配的约束强度。受标记点位限制的双移线工况下的结果显示: 1) 上层控制器输出的附加横摆力矩ΔM(L)对协调变量L的响应是变化的,且各部分的有效程度主动可调。 2) 在协调变量L的作用下,约束强度的弱化有效改善了电机扭矩的分配。相较于2种已有的策略,轮毂电机的平均效率可分别提高3.9%和7.2%。 3) 所提出的策略能够较好地跟踪期望的质心侧偏角和横摆角速度,具有较好的横向稳定性。 后续将设计关于协调变量L的控制模组,进一步优化轮毂电机的扭矩配置,提高4WID-EV的经济性。4 仿真验证
5 结论