P1-P4构型混合动力汽车节油率对比研究
2022-10-12陈东东李国兴乔天佑
陈东东,王 铁,李国兴,乔天佑,陈 尧
(太原理工大学 车辆工程系, 太原 030024)
0 引言
随着环境污染和石油资源短缺问题的加剧,人们越来越注重汽车的环保与节能。《节能与新能源汽车技术路线图2.0》中提到:到2035年,传统能源动力乘用车将全部转变为混合动力,而新能源汽车将成为主流[1]。混合动力汽车兼具纯电动汽车和传统燃油车的优点,在国家向世界承诺2030年前碳达峰、2060年前碳中和的大背景下,中国汽车、中国内燃机界应该不断努力探索[2-3]。
能量管理策略通过控制策略控制整车动力流向进而充分发挥混合动力汽车(hybrid electric vehicle,HEV)节能减排的潜力。等效油耗最小策略(equivalent consumption minimization strategy,ECMS)通过等效因子把电耗等效为油耗达到瞬时最优,在维持充电的混合动力电动汽车中,在电池放电阶段使用的任何存储电能在后期使用发动机的燃油或通过再生制动进行补充[4-5]。邓涛等[6]通过硬件在环仿真实验,验证了ECMS控制策略的实时性和可靠性,具有良好的稳定能力。荆培杨[7]在基于逻辑门限的基础上使用蚁群算法对ECMS等效因子寻优,与逻辑门限相比,ECMS百公里油耗减少0.6 L。罗俊林[8]把离散化算法融合到ECMS中,解决了ECMS实时性问题,通过惩罚函数维持稳定性。等效因子初值的选取十分重要,初值的大小直接影响后边等效因子的迭代计算。杨业等[9]提出了一种改进的射击算法,以快速获得等效因子的初值。
SOC参考值的确定与SOC偏差值有很大关系,影响SOC反馈。动态规划算法DP是求解全局最优参考SOC的方法之一,Wang等[10]研究了一种以DP全局优化算法得到的SOC作为自适应ECMS的参考SOC。Fan等[11]利用DP算法提取3个典型工况下的模式切换边界和换挡规律,利用ECMS代替等效因子在更大范围内在线寻找实时最优解,建立了参考SOC,采用PI算法,通过调整等效因子使实际SOC始终跟随参考SOC。孙蕾等[12]根据DP算法得到以全局优化为目标的SOC斜率,进一步通过SOC标准斜率修正DP算法下的SOC斜率作为SOC参考斜率,转化为参考SOC,最后基于ECMS通过罚函数修正等效系数,使实际的SOC能够跟随参考SOC,优化等效因子,提升燃油经济性。邓涛等[13]利用DP算法得出最优控制参数,作为计算等效因子的输入,充放电等效因子分开计算。苗强等[14]以通过DP算法获得的最优控制结果为基础,逆向推出ECMS策略的最优等效因子。孔凡敏[15]用DP算法求解某一循环工况下的最优控制解,最优控制解用每一时间点上的最优电机转矩和SOC表示,利用ECMS求出不同等效因子下的扭矩,若两者一样,则此时的等效因子为最优。
近年来,基于等效油耗最小的混合动力汽车能量管理策略广受关注,主要是针对如何优化等效因子展开研究,对其在不同构型上的应用较少。本文对等效油耗最小在P1-P4构型混合动力汽车上的应用展开仿真研究,探讨其策略对不同构型混合动力汽车的节油潜力。
1 P1-P4构型混合动力系统
1.1 P1-P4构型
根据电机与发动机、变速箱、车轴之间的相对位置,混合动力系统可以分为5种构型,即P0、P1、P2、P3和P4,如图1所示。P0:皮带传动起动发电机(belt driven starter generator,BSG),通过皮带连接发动机前端;P1:起动/发电一体机(integrated starter and generator,ISG)电机,与发动机的飞轮盘结为一体,位于发动机后端;P2:ISG电机,通过离合器连接在发动机后变速器前;P3:电机连接在变速器的输出轴上;P4:电机安装在车的后桥上。

图1 混合动力系统P0-P4电机位置示意图
1.2 汽车参数
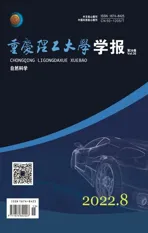
HEV动力系统结构由柴油发动机、液压离合器、驱动电机/发电机、变速箱等组成,发动机和电机通过传动轴互相连接,可以实现纯电动、行车充电、混动、制动能量回收等多种模式。研究车型的主要系统零部件参数如表1所示。
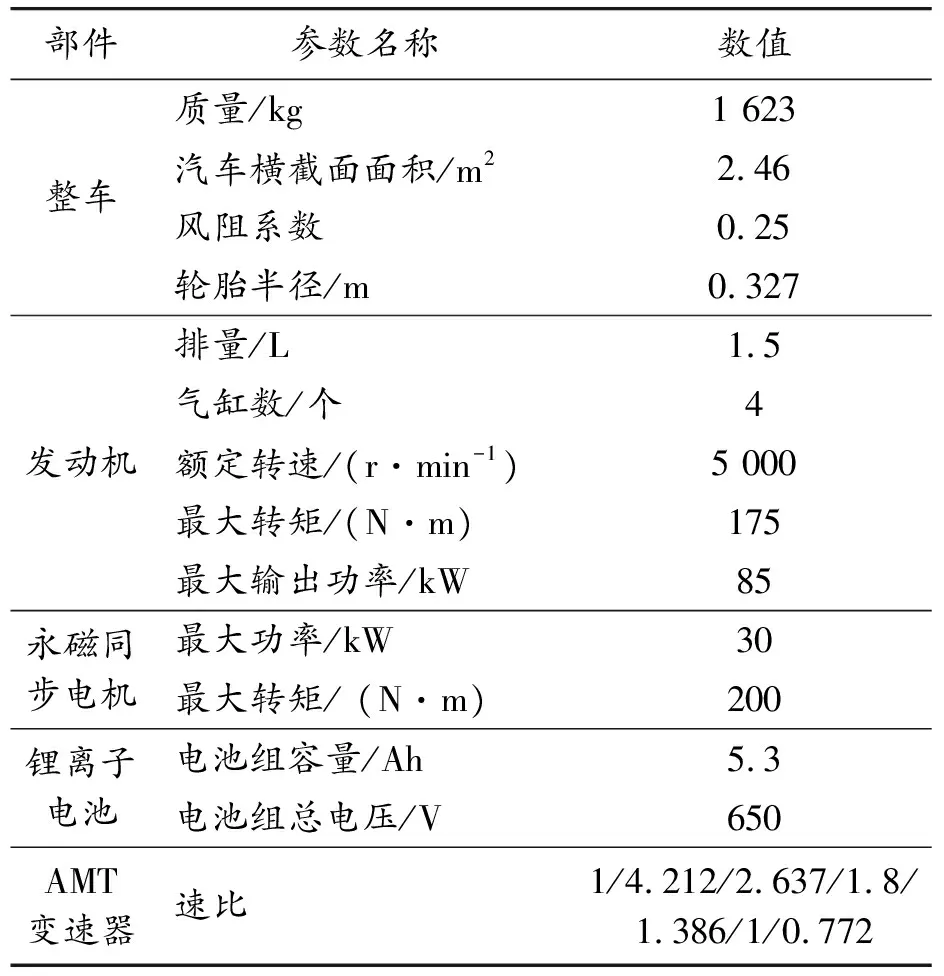
表1 研究车型的主要系统零部件参数
1.3 混合动力系统建模
1.3.1整车模型
图2为整车仿真器顶层示意图。整车仿真器执行过程主要由以下模块组成:
行驶工况模块:生成车辆应实现的速度、加速度。
驾驶员模块:计算目标行驶工况所需的转矩,通过负反馈实时调整,反馈项与速度跟踪误差成正比。
控制器模块:又称能量管理模块,生成发动机和电动机的动力输出值。该模块的输入是总转矩设定值和来自车辆的检测值,即电池SOC和车辆速度。
车辆与动力系统模型:包含被控对象模型,以发动机和电机设定点作为输入,计算当前车速和电池SOC的变化,以及发动机燃油消耗。
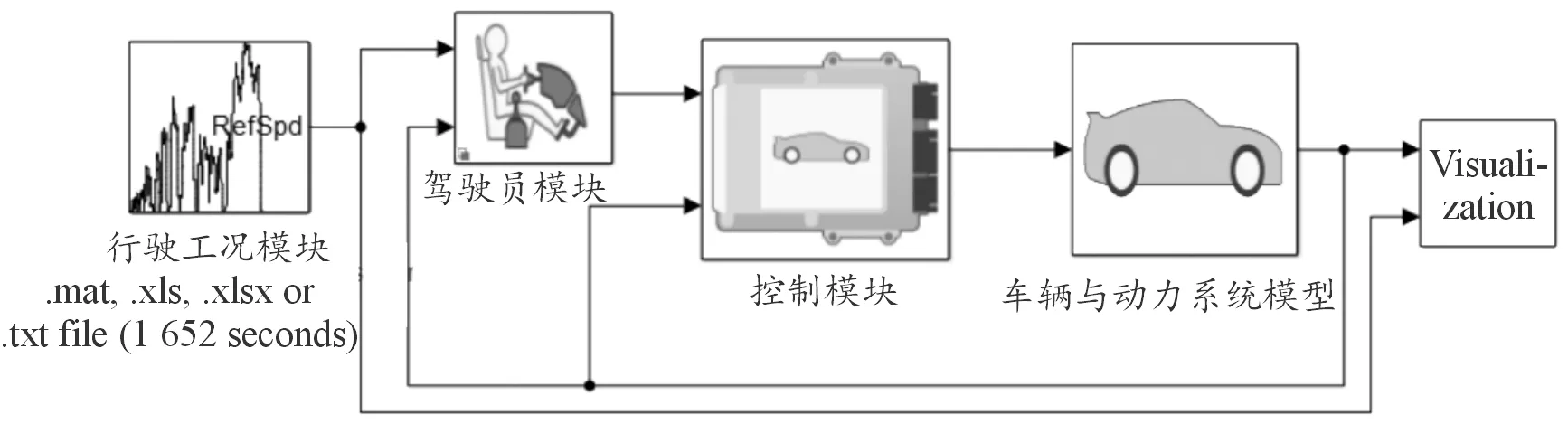
图2 整车仿真器顶层示意图
1.3.2传动系统模型
根据P1-P4构型的特点,分别搭建传动系统模型,如图3所示。几种构型的特点是电机位置不同,动力耦合方式不同。

图3 传动系统模型
1.3.3发动机数学模型
根据发动机特性曲线,建立输入输出关系,发动机万有特性如图4所示,通过查表或数据拟合得到发动机转矩和油耗。

图4 发动机万有特性曲线
发动机输出转矩为:
Te=ftorque(ae,ne)
(1)
发动机瞬时油耗为:
mf=ffuel(Te,ne)
(2)
式中:ae为发动机油门开度;ne为发动机转速;Te为发动机转矩;mf为发动机瞬时油耗。
1.3.4电机数学模型
电机在混合动力车辆行驶中既能充当动力源为车辆提供驱动力,又能回收部分能量流入电池。电机效率特征如图5所示。
电机的效率为:
ηm=η(nm,Tm)
(3)
电机的功率为:

(4)
式中:nm为电机转速;Tm为电机转矩;ηm为电机效率;Pm为电机功率。

图5 电机效率特征曲线
1.3.5电池模型
根据电池使用过程中电压下降的特性,采用电池充放电效率曲线确定电池电压与SOC的关系,电池电阻与温度和当前SOC有关。
电池SOC为:
(5)
电池电流为:
(6)
式中:SOC0为电池初始负荷状态;C为电池容量;U为电池开环电压;R为电池内阻;Pb为电池功率。
2 等效燃油消耗最小策略
2.1 基本原理
ECMS最初是由Paganelli于1999年提出的,它是一种将全局最小化问题简化为瞬时最小化问题的方法,该问题在每个时刻仅使用基于动力系统中实际能量流的参数来解决[16]。
ECMS方法的基本原理是将成本分配给电能,从而使电储能的使用等同于使用(或节省)一定量的燃料。这一成本显然是未知的,因为它取决于未来的车辆。ECMS方法充放电过程中的能量路径如图6所示,在放电状态时(图6(a)),电动机提供动力,虚线路线与未来所用电能的回收有关,充电的工作点无法预先知道。在充电状态时(图6(b)),电机将机械能转换为电能存储在电池,虚线路线与未来利用这种电能所产生的机械能有关,被认为是一种节油的方法,在这种情况下,电动机的等效燃油流量为负。
图6 ECMS方法充放电过程中的能量路径示意图
(7)
瞬时燃油消耗量为:
(8)
式中:ηeng(t)为发动机效率,Peng(t)为发动机在一定效率下运行时产生的功率。电机等效虚拟燃料消耗量为:
(9)
等效因子s(t)代表燃料转化为电能的效率链,反之亦然。传统的ECMS公式中,等效因子是一个常数。
等效因子代表了发动机和车载充电能量储存系统过去、现在和未来的效率,其值影响充电的可持续性和能量管理策略的有效性。如果该参数过高,代表使用电能的成本高,因此无法充分实现混合动力的潜力,如果该参数过低,则相反,电池耗电加快。
在实现ECMS时,通常使用罚函数来保证SOC不超过容许极限SOCmin≤SOC≤SOCmax。罚函数对于实现可靠的电池充电状态在线估计起着关键作用。因此,通过构造适当的罚函数p(SOC)对等效燃料消耗进行修改,如下式所示:
(10)
瞬时等效成本中使用的罚函数是一个修正函数,它考虑了当前SOC(t)与目标荷电状态SOCtarget的偏差:
(11)
当SOC>SOCtarget时,p(SOC)<1,这意味着电池能量的成本较低,因此当SOC高于参考值时,放电的可能性更大。另一方面,当SOC
2.2 ECMS模型
基于ECMS的能量管理模块主要包含控制域模块、动力系统向后仿真模型和哈密顿函数计算及其最小化模块,其Simulink模型如图7所示。

图7 基于ECMS的能量管理模块Simulink模型
控制域模块:用于产生评估哈密顿函数的控制集,其中有N个元素,包括发动机驱动模式、纯电动模式或零发动机驱动模式,然后在电动机的绝对最小和最大转矩之间均匀地分配(N-2)个转矩值,以覆盖其整个转矩范围。
动力系统向后仿真模型:实现了车辆动力学方程的建模,并输出计算哈密顿函数所需的所有变量。但并不是所有候选控制量都能产生可行的解决方案,因为一些控制量可能不满足所有瞬时约束,需要识别,以便从后续的最小化过程中排除。
哈密顿函数计算及其最小化模块:计算控制数组中所有元素的哈密顿函数,然后识别对应于最小值数组下标。该索引的下标用于从发动机、电动机和制动转矩矩阵中选择最优值,以运用于系统中。其Simulink模型如图8所示,等效因子s为定值。

图8 哈密顿函数计算及其最小化模块Simulink模型
2.3 自适应A-ECMS模型
等效消耗最小化策略算法的3个核心问题:如何确定等效燃油消耗因子;如何根据车辆的行驶状态,对车辆行驶需求的功率在动力源之间进行优化分配,以使瞬时等效油耗最低;如何保证在整个循环工况过程中保证电池SOC的收敛性。
传统ECMS认为等效因子是一个定值,而自适应等效因子会随着SOC值和工况的变化而变化,常用罚函数保证整个循环工况下SOC的收敛性,罚函数可分为有S型拟合曲线、分段函数和正切函数对SOC进行补偿修正,调节等效因子实现对SOC参考轨迹的跟踪。
通过SOC偏差反馈调节等效因子,该方法证明能够有效控制电池SOC在一定范围内变化,保持电池SOC稳定。基于SOC反馈的等效因子s的计算模型如图9所示。

图9 基于SOC反馈的等效因子s的计算模型
3 仿真及结果分析
3.1 汽车循环测试工况
汽车循环测试工况是汽车燃油经济性和排放性能评价的基础,选取全球统一轻型测试工况(WLTC)、联邦测试程序(FTP75)和高速道路循环工况(HWFET)分别代表标准、城市和高速行驶工况[17-18],比较不同车型在不同行驶工况下的车速,汽车循环测试工况如图10所示。
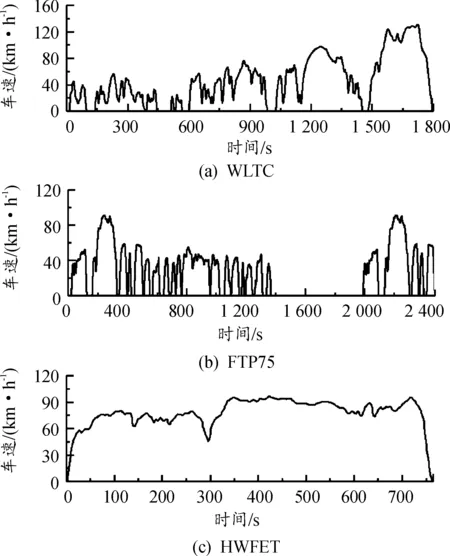
图10 不同汽车循环测试工况下的车速
图11为不同行驶工况下车轮的需求功率分布。

图11 不同行驶工况下车轮的需求功率分布
由图11可知,WLTC工况为标准的汽车循环测试工况,包含不同的加减速、匀速、怠速,可以作为标准工况的代表。在FTP75工况下,车轮需求功率主要分布于0~10 kW,属于低功率范围,可以很好地代表城市工况。在HWFET工况下,车轮需求功率主要分布于10~20 kW,属于高功率范围,可以代表高速工况。3种工况的最大速度分别是131.5、91、96 km/h,平均速度分别是46.77、34.1、77.7 km/h,从最大速度、平均速度和功率分布的特征性能可以看出,3个循环测试工况存在显著差异,因此可以作为代表工况进行P1-P4构型混合动力汽车燃油经济性对比分析。
3.2 初始等效因子的选取
初始等效因子与电池SOC有直接相关性,影响工况结束时SOC趋近于参考SOC值。初始等效因子需要保证SOC在参考SOC值附近收敛,同时在运行周期内的燃油消耗量最少。初始等效因子对SOC的影响如图12所示。由图12可知,随着s的增大,运行周期结束时的SOC值变大,这主要是因为,s越大,代表用电的成本越高,系统倾向于更少的放电和更多的充电,发动机介入工作更多,油耗增加。初始等效因子为4时,SOC的稳定性较好,所以初始等效因子选4。

图12 初始等效因子对SOC的影响
3.3 能量管理策略仿真结果分析
初始SOC值为60%,车速跟随主要与驾驶员模型和控制策略有关,模型应有较好的车速跟随和较小的车速波动。图13为P1-P4构型模型中的车速误差。由图13可知,4种构型的车速误差均在±5 km/h,急加速和急减速工况下均未出现车速误差较大的情况,证明4种构型的模型都能很好地跟随目标转速,满足设计要求。
为了验证A-ECMS能量管理策略对复杂工况的适应性,以典型的P2构型混合动力汽车为例进行仿真计算,在WLTC、FTP75和HWFET 3种工况叠加的复合工况下,比较基于规则、传统ECMS和自适应A-ECMS 3种能量管理策略下的SOC变化轨迹,如图14所示。由图14可知,在复合工况下,3种策略的终点SOC分别为59.52%、62.03%和60.84%。相比基于规则和基于ECMS的能量管理策略,基于A-ECMS的能量管理策略可以在SOC偏离参考值较多时实时调整等效因子,使系统SOC向参考值60%靠近,对SOC都起到稳定性的作用,动力电池运行在效率较高的区域。
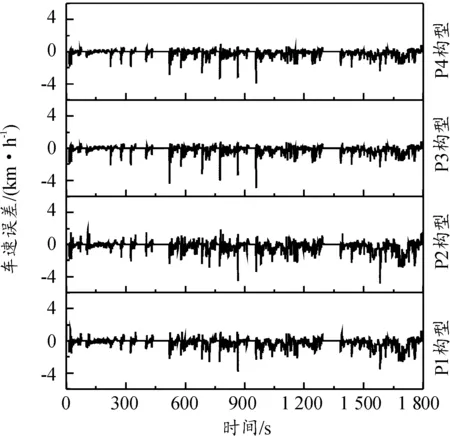
图13 P1-P4构型模型中的车速误差

图14 P2构型混合动力汽车在3种能量管理策略下的SOC变化轨迹
本文研究对象为HEV,所有的能源都来源于燃油,由于无法严格确保电池SOC的初始值和终点值相等,将电池的能量等效为燃油消耗,消除SOC变化带来的影响,将发动机实际燃油消耗和电池等效燃油消耗之和作为最终的燃油经济性指标[18]。
图15为基于规则、ECMS和A-ECMS能量管理策略在WLTC循环工况下的汽车经济性对比。初始等效因子不变,在WLTC工况下,相比基于规则的能量管理策略,基于ECMS和A-ECMS能量管理策略使混合动力汽车的百公里油耗分别减少1.17%和2.22%。综上,基于A-ECMS的能量管理策略比基于规则和基于ECMS的能量管理策略节能,并且对复杂工况的适应性较好,因此用基于A-ECMS的能量管理策略来对比分析不同构型的节油率。

图15 P2构型混合动力汽车在3种能量管理策略下的百公里油耗
3.4 不同驾驶循环工况对比分析
为了对比分析不同构型混合动力汽车的节油率,在WLTC、FTP75和HWFET 3种循环工况下,以P1-P4构型混合动力汽车为例进行仿真计算,分析不同构型混合动力汽车的SOC变化及百公里燃油消耗量。
3.4.1WLTC工况的性能对比
图16为P1-P4构型混合动力汽车在WLTC工况下的SOC变化曲线和百公里油耗对比。由图16(a)可知,P1和P2构型的SOC变化曲线相似,P3和P4构型的SOC变化曲线相似,这主要是因为它们的构型特点导致。P1-P4构型的工况终点SOC分别为58.36%、55.94%、58.35%和59.76%。
由图16(b)可知,P1-P4构型的百公里油耗分别为7.16、7.49、6.8、6.93 L,初始等效因子一样的情况下,相比P2构型,P1、P3和P4构型混合动力汽车的百公里油耗分别减少4.41%、10.15%和7.48%。
3.4.2FTP75工况的性能对比
在FTP75工况下,基于自适应A-ECMS策略下的P1-P4构型混合动力汽车的SOC变化轨迹和百公里油耗如图17所示。由图17(a)可知,初始等效因子一样的情况下,P1-P4构型的工况终点SOC分别为62.01%、61.43%、62.51%和62.39%,整个工况中,P1和P2构型的SOC波动频率明显小于P3和P4构型。

图16 P1-P4构型混合动力汽车在WLTC工况下的SOC变化轨迹和百公里油耗

图17 FTP75工况下基于自适应A-ECMS策略下的P1-P4构型混合动力汽车的SOC变化轨迹和百公里油耗
由图17(b)可知,P1-P4构型的百公里油耗分别为7.35、7.66、6.80、6.91 L,相比P2构型,P1、P3和P4构型混合动力汽车的百公里油耗分别减少4.05%、12.65%和9.79%,P3构型明显节油率较高,P4构型次之。
3.4.3HWFET工况的性能对比
在HWFET工况下,基于自适应A-ECMS策略下的P1-P4构型混合动力汽车的SOC变化轨迹和百公里油耗如图18所示。由图18(a)可知,P1-P4构型的工况终点SOC分别为60.41%、61.90%、60.26%和60.50%,整个工况中,P2构型的SOC波动较小,主要是因为高速工况P2构型的电机较少参与驱动。
由图18(b)可知,P1-P4构型的百公里油耗分别为5.94、6.24、5.83、5.93 L,相比P2构型,P1、P3和P4构型混合动力汽车的百公里油耗分别减少4.81%、7.03%和4.97%,P3构型的燃油经济性最好,P1和P4构型区别较小。
综上,相比P2构型,不同循环工况(WLTC、FTP75和HWEFT)下P1、P3和P4构型百公里油耗平均节省0.94、1.96和1.62 L,平均节油率为4.39%、10.09%和7.57%,P1-P4混合动力汽车的节油率排序为P3>P4>P1>P2,因此,P3构型的节油潜力更高。无论哪种构型,在高速工况下的燃油经济性最好,城市工况和标准工况下相差不大。

图18 HWFET工况下基于自适应A-ECMS策略下的P1-P4构型混合动力汽车的SOC变化轨迹和百公里油耗
4 结论
1) 对P1-P4构型混合动力汽车进行分析,P1和P2构型的工作状态类似,P3和P4构型的类似,建立了相同动力组件及车身的P1-P4构型的Simulink模型,为后期验证能量管理策略奠定了基础。
2) 相比基于规则和基于ECMS的能量管理策略,基于A-ECMS的P2构型混合动力汽车对复杂工况的适应性较好,动力电池运行在高效区间,同时其百公里油耗最少。
3) 不同构型的油耗和SOC变化对比分析,在标准工况和城市工况下,P1和P2构型的差异较小,P3和P4构型的差异较小;在高速工况下,P1、P3和P4的差异较小。
4) 在相同车辆参数下仿真,P3构型的燃油经济性始终最好。与P2构型相比,不同循环工况下P1、P3和P4构型百公里油耗分别平均节省0.94、1.96和1.62 L,平均节油率分别为4.39%、10.09%和7.57%。
综上,P1-P4混合动力汽车中,P3构型的节油率最好,节油潜力最大,本研究可为基于等效油耗最小能量管理策略的并联式混合动力汽车的构型选择提供理论依据。