基于光电传感和轨迹观测的多级感应线圈炮触发控制研究
2022-09-14郭灯华史铎林关晓存管少华吴彪
郭灯华, 史铎林, 关晓存, 管少华, 吴彪
(海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉 430030)
0 引 言
电磁发射是采用电磁力作为推进力的发射方式,能够突破化学能极限,具有前沿应用前景[1-4]。同步感应线圈炮是电磁发射的一种,具有结构简单,配置灵活,无机械摩擦等特点。在电磁能武器、试验平台、航空航天等领域具有巨大优势[5-7]。
由于线圈炮定子线圈和电枢之间耦合量随二者相对位置变化,线圈电流和电枢涡流是一个复杂动态过程,使得控制线圈炮达到大能级和高速度输出有很大挑战。美国Sandia国家实验室设计了一种线圈型电磁发射装置,由45级将18 kg发射体加速至424 km/s[8-11],该装置采用94 GHz微波雷达布置在发射装置尾部来检测发射体的位置和速度,来控制各级线圈驱动电源的触发时序,也有文献报道类似微波多普勒测量方式[12],这类方案需采用昂贵的微波雷达设备,且探测距离有限。2010年德州大学研究了末速度为200 m/s的小型线圈炮,采用高速相机测速[13];有文献报道在线圈炮尾部设置激光测距方式[14-16],这些测量方式存在测量成本高和测量距离受限等缺点;张等人采用4级线圈将0.65 kg发射体加速至125 m/s,在线圈之间设置对射光纤传感器,通过电枢截断信号来触发各级驱动电源[17],该方案测速精度是线圈长度,检测分辨率不够高。
为解决上述研究存在的探测距离有限、检测分辨率低等问题,本文研究一种基于光电传感和轨迹观测的30级同步感应线圈炮触发控制方式。该方法在线圈之间布置光电传感器,通过级联式探测发射体条纹输出正交波形,再转换成发射体位置;采用观测器得到观测速度和平滑位置,分析观测器稳定性和性能,优化观测器带宽。再根据观测轨迹进行各级线圈触发控制,得到很好的控制效果。通过仿真和试验对该触发控制方法进行验证。
1 线圈炮原理
为了实现较大功率输出,大功率的线圈发射系统一般采用脉冲电容作为储能元件,晶闸管和二级管等半控器件作为开关组件。其原理图如图1所示。

图1 多级感应线圈炮原理图Fig.1 Structural diagram of multi-stage induction coil gun
采用电流丝法建立线圈炮模型,线圈电磁方程为
(1)
其中:
电枢运动方程为:
(2)
(3)
互感梯度与位置关系曲线如图2所示。

图2 推力与互感梯度Fig.2 Force and mutual inductance gradient
当电枢位于线圈中性线前时,电枢受力向前,当电枢位于线圈中性线后时,电枢受力向后,当电枢横向与线圈重合时,电枢受力为零,此时互感最大。
为了尽可能实现线圈炮的最大出力,需要优化线圈炮的控制。由式(3)可知,若控制线圈触发时刻,使得线圈电流达到最大时,电枢恰好运动至互感梯度最大点,则线圈发射出力最大。由于线圈对应的脉冲电源触发后,电流需要一段时间才上升到最大值,因此,需要根据电枢速度和位置来预估电流最大值对应的电枢位置。
由于线圈时间常数较大,电流上升存在一定时间,当电枢速度较高时,上升时间内电枢会运动较长距离,而线圈和电枢耦合出力范围较短。因此,需要考虑电流上升时间和电枢运动速度。
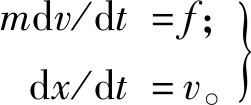
该触发方式是在电枢运动至耦合出力点较大位置之前,提前触发线圈,当线圈电流达到最大时,电枢恰好运动到耦合出力点,使电枢推力达到最大。触发原理如图3所示。
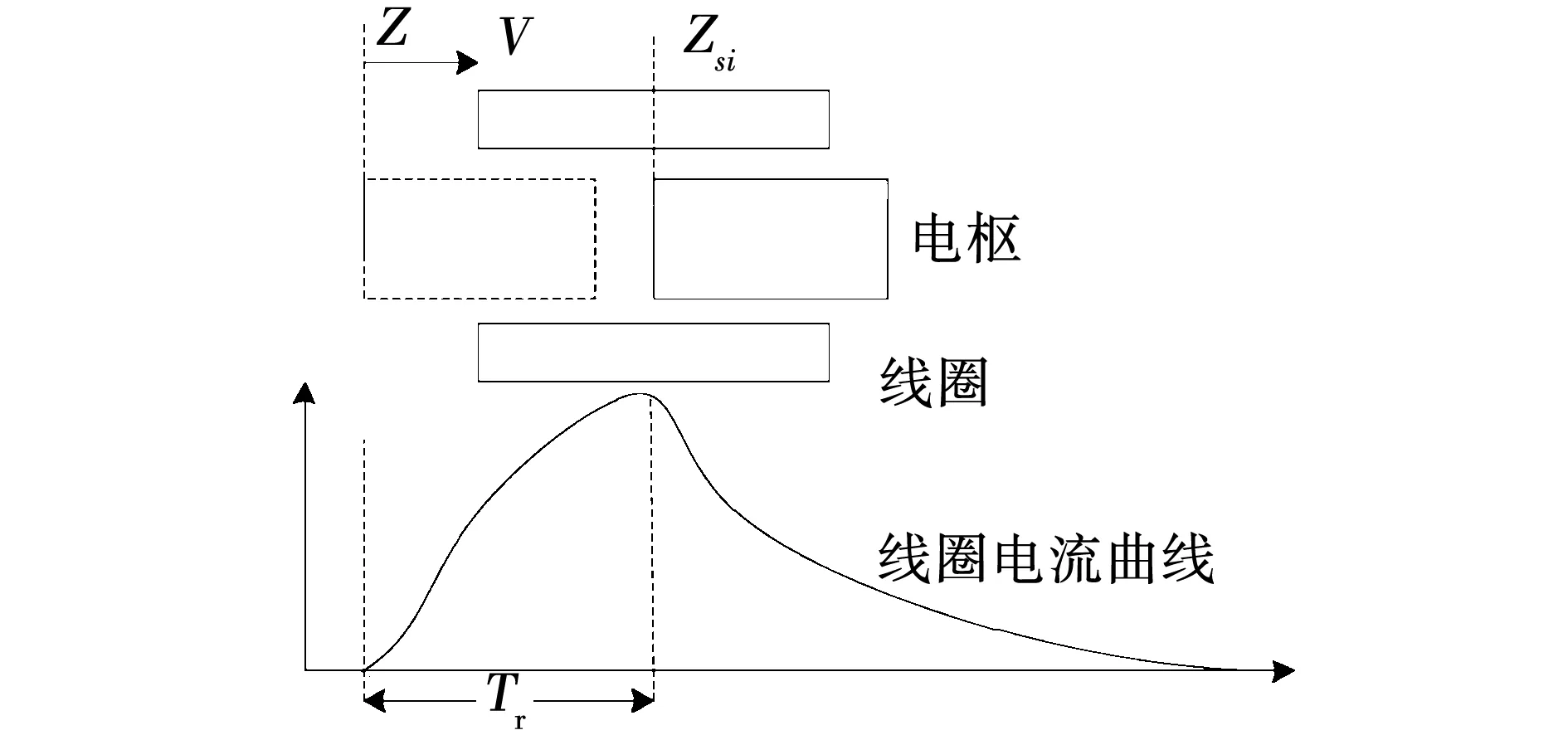
图3 触发原理图Fig.3 Structural diagram of trigger
图中:触发时刻电枢位置是z;第i级线圈和电枢最佳耦合位置是Zsi;电枢速度是v;线圈电流上升时间是Tr。则第i级线圈触发在满足下列关系时,可获得较优触发效果,即
(4)
式中Si是第i级线圈的晶闸管触发信号。
2 位置检测与轨迹观测
通过有限元软件计算线圈炮位置传感器布置处的磁感应强度,见图4。可以看出磁场强度达到了5T,同时由于电枢速度达几百米每秒,加速度上千G。因此,需要检测系统能耐强磁场干扰且满足高加速和高响应速度。
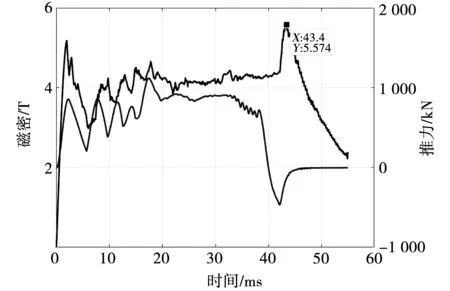
图4 磁感应强度和推力Fig.4 Magnetic induction intensity and force
本文采用的电枢位置检测方案如图5所示,在每级线圈之间间隙,布置一组光电传感器,光电传感器组由4个发射式光电探头组成。电枢上表面涂黑白条纹,光电探头检测条纹输出0和1信号。光电探头之间轴向布置距离是δ,电枢上黑白条纹间距是4δ,探头1和3组成一组正交编码信号,探头2和4组成另一组正交编码信号,两组正交编码信号合成后输出位置检测精度是δ。
图5 光电传感器布置原理图Fig.5 Schematic diagram of photoelectric sensor arrangement
若干组光电传感器组信号经一个CPLD处理板收集后,转为高速串行信号发送给FPGA总处理板,FPGA总处理板可以接收多路CPLD处理板串行数据。这样,FPGA总处理板可以获得整个线圈炮的位置检测信号,进而获得电枢在发射膛内的全部位置信息。
为了使不同光电传感器模组之间的信号能够有效级联,电枢上涂的黑白条纹长度需大于一个线圈间距,且线圈间距是8δ的整数倍,即
Lcoil=8nδ。
(5)
其中:Lcoil是线圈间距;n是正整数;δ是相邻光电探头轴向距离,也即编码精度。
电枢在膛内运动速度较高,需要分析位置检测的实时性。设光电传感器检测速率是fs,由于电枢每运动8δ,光电信号跳变一次,因此,能够满足的检测速度是
vz≤8kδfs。
(6)
其中:vz是电枢轴向速度;k是冗余系数,其中k取1/3。由此计算,例如对于最大速度200 m/s的检测,检测精度是2.5 mm,光电传感器检测速率至少是30 kHz。
由触发公式(4),控制系统需要获得电枢速度,而该位置检测方式只能直接测得电枢位置。由于检测位置是离散的,直接微分得到的速度含较大波动,需要采用观测器来提取电枢速度和平滑位置。由于整个计算过程时间很短,对需要观测器具备快速性,这里构建Luenberger观测器来观测速度,观测框图见图6。
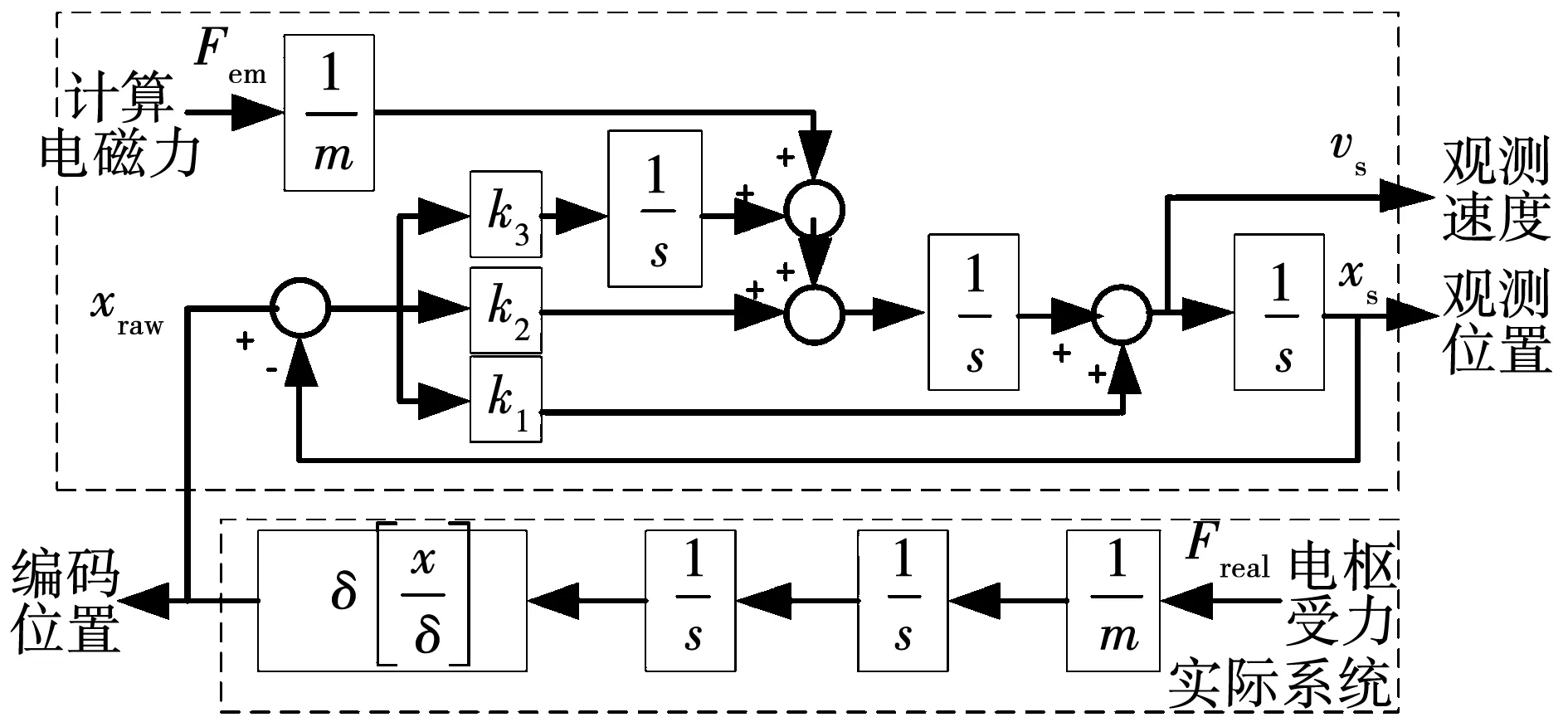
图6 观测器框图Fig.6 Schematic diagram of observer
图中:Fem是计算电磁力;m是电枢质量;k1、k2、k3是观测器参数;vs,xs是观测速度和位置;xraw是编码位置;δ是编码精度;δ[x/δ]表示对x按δ离散化。观测器微分方程为
(7)
分析式(7)的稳定性,实际系统微分方程为
(8)
其中:xr、vr是实际位置和速度;Freal是实际受力,将式(7)和式(8)的x和v对应相减,令Freal与Fem相等,可以得到
(9)
其中xe=xr-xs,ve=vr-vs,代表观测和实际的位置和速度误差,当k1、k2、k3取正值时,式(9)的系数矩阵特征根均为负。因此,式(9)是一个收敛的微分方程,即实际轨迹和观测轨迹误差会收敛至0(轨迹至位置和速度曲线),观测轨迹会收敛至实际轨迹。
3 观测器参数
式(9)的特征方程为
λ3+k1λ2+k2λ+k3=0。
(10)
令k1=ω(2ζ+1),k2=ω2(2ζ+1),k3=ω3,ζ=0.707,这样特征根分布在负半轴,半径为ω的圆上,ω是观测器的带宽。
观测器的带宽选取很重要,若带宽较低则控制器响应过慢,无法满足高速发射工况;若带宽较高,则势必引入较大观测噪声,带来控制误差。
通过仿真获得发射时电枢的速度和位置曲线,观测器频率分别取10、100、1 000 Hz时对比实际和观测曲线,如图7~图9所示。

图7 轨迹对比(ω=10 Hz)Fig.7 Comparasion of trajectory(ω=10 Hz)
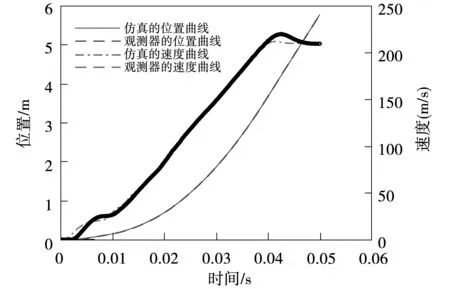
图8 轨迹对比(ω=100 Hz)Fig.8 Comparasion of trajectory(ω=100 Hz)
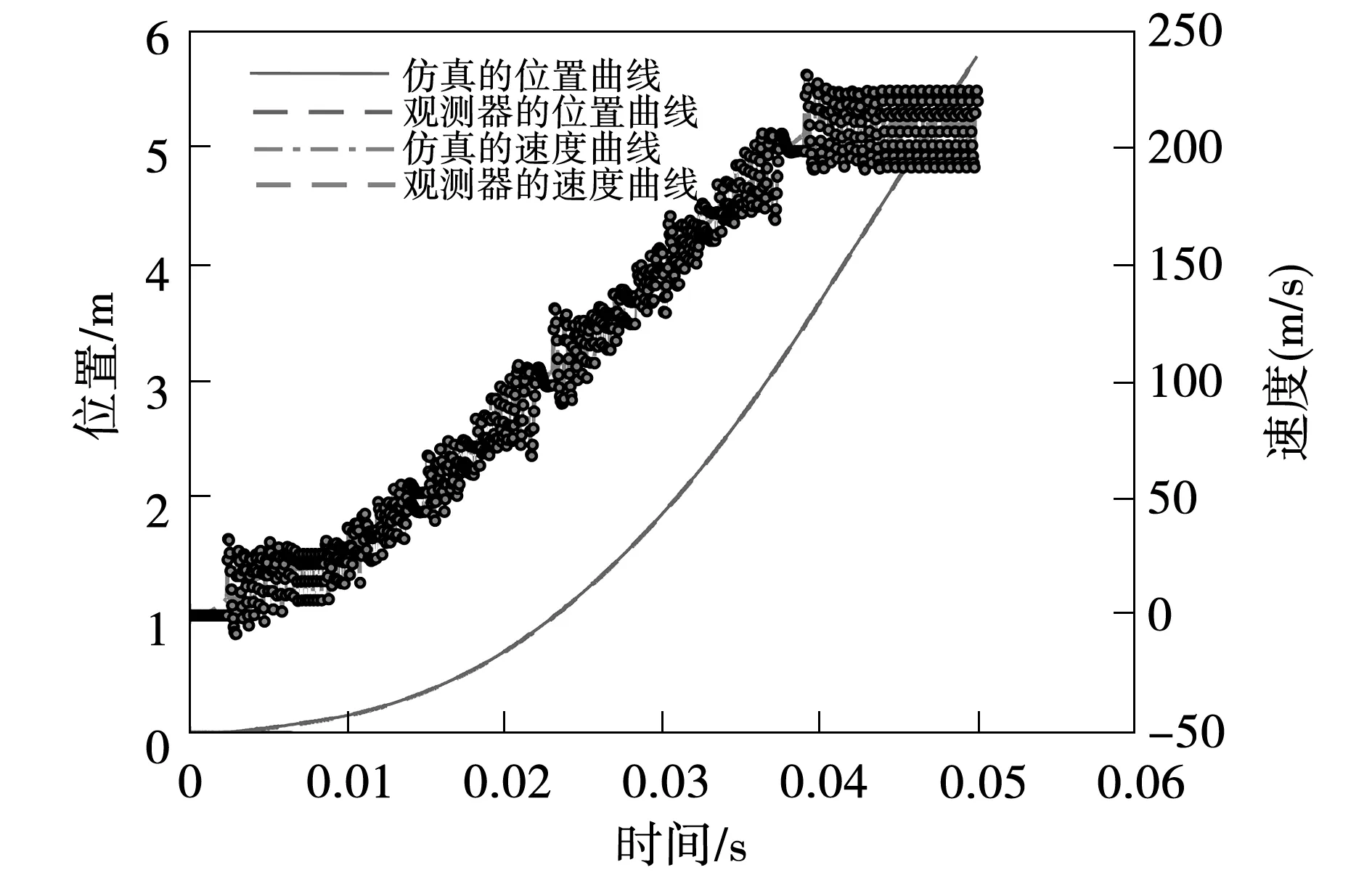
图9 轨迹对比(ω=1 000 Hz)Fig.9 Comparasion of trajectory(ω=1 000 Hz)
可以看出,观测频率较低时观测的位置和速度不能快速跟踪实际位置和速度曲线,观测频率较高时,则由于离散编码位置,会引入较大噪声,需要选择合适的观测频率。这里通过二次优化方式选取观测器,定义观测误差为
(11)
其中:x、v分别代表位置和速度;下标obs表示观测,sim表示仿真。

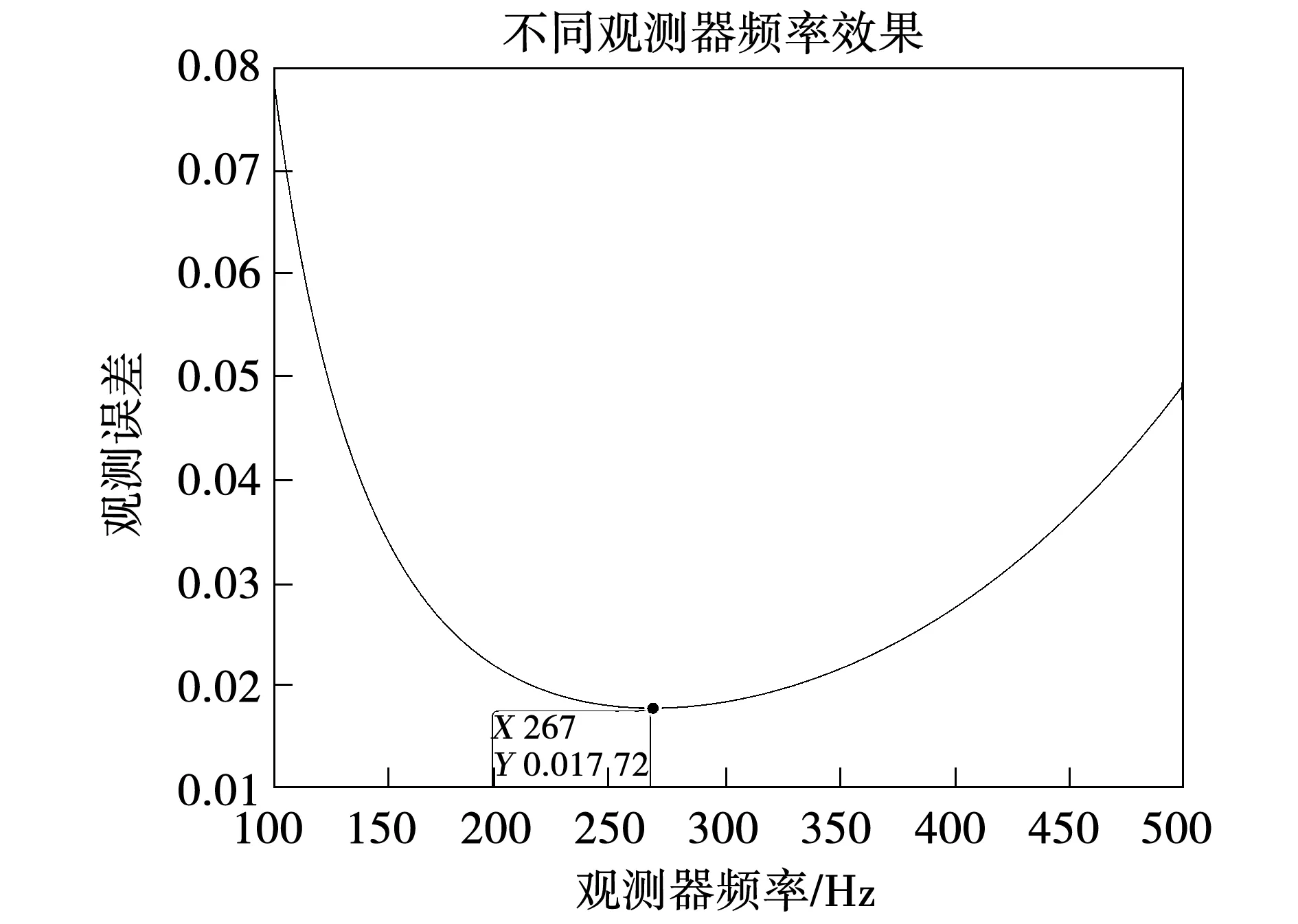
图10 不同观测频率下的误差曲线Fig.10 Error curves under different observer frequency
为了兼顾观测的快速性和平滑性,选误差最小对应的267 Hz作为观测器频率。
4 实验验证
在30级线圈炮系统上进行试验,发射体质量(含电枢)是200 kg,验证本文研究的轨迹观测控制方法,试验装置参数如表1所示。

表1 试验装置参数Table 1 Experimental device parameters
试验装置的实物图见图11~图13,图11是30级感应线圈炮,图12是带黑白条纹的电枢,材质是6061铝,图13是光电编码器组、并行转串行模块、控制器。

图11 30级感应线圈炮Fig.11 30-stage multi induction coil gun

图12 带黑白条纹电枢Fig.12 Armature with black-white stripe

图13 位置检测与控制器Fig.13 Position detection and controller
控制器主控板采用DSP+FPGA+ARM型式,DSP型号是TI TMS320F28335,FPGA型号是Xilinx Virtex V4,ARM型号是STM32F407。其中,DSP工作在40kHz,负责观测器和触发计算,FPGA负责接收各编码器信号和接收采集的电压电流等模拟量,ARM通过以太网进行数据传输。将试验采集的数据和仿真结果进行对比,见图14~图16。
图14是30级线圈的放电电流曲线,30级线圈仿真放电时间与实际触发放电时间数据对比,可以看出二者吻合很好,未出现提前触发或延后触发。

图14 电流曲线Fig.14 Current curves
图15是每个光电传感器采集的波形,横坐标数据是时间,纵坐标数据是每个传感器采集的波形,有波动的地方代表传感器检测到电枢条纹。
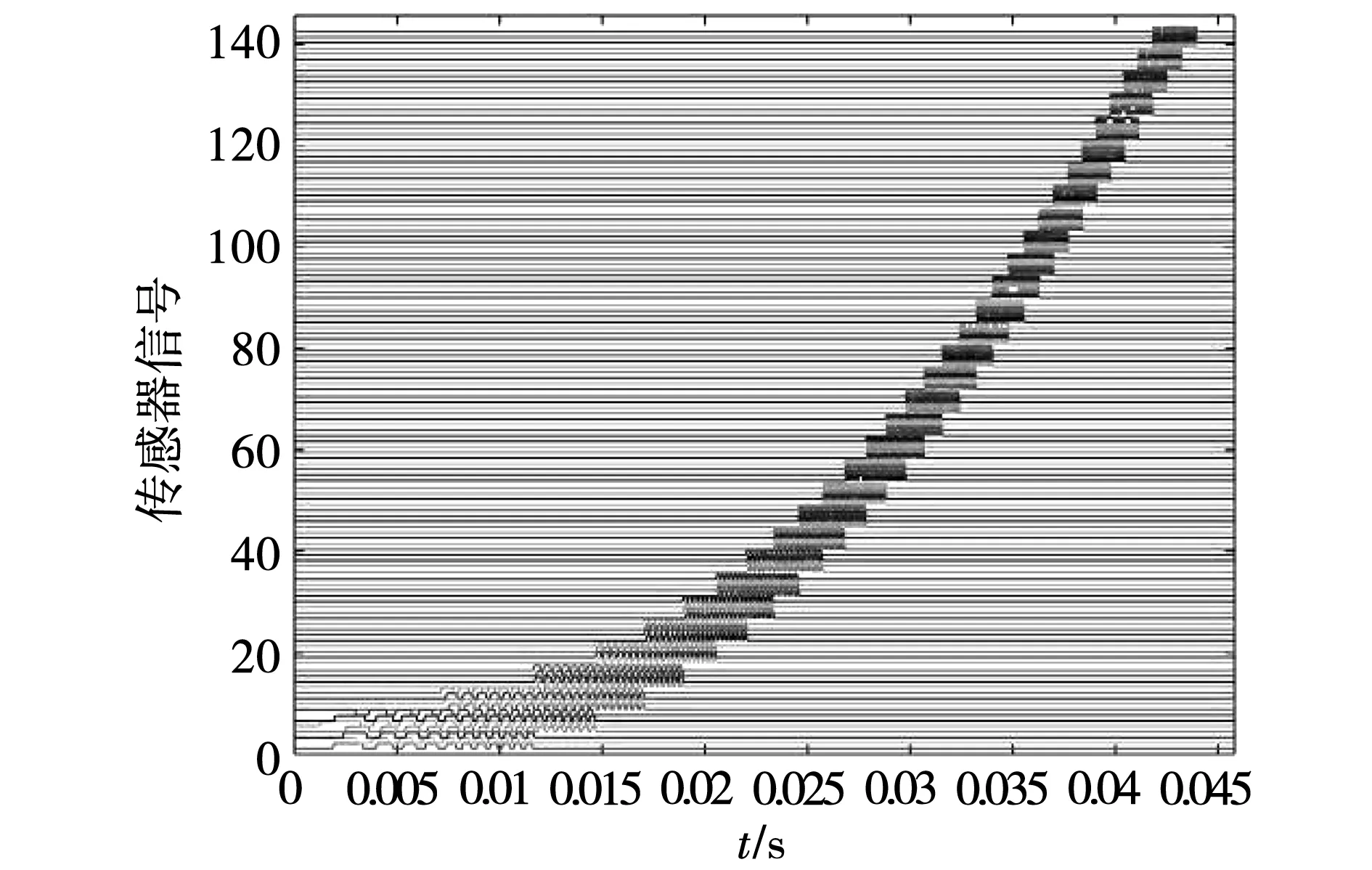
图15 编码器波形Fig.15 Waves of encoders
图16是观测的速度和位置曲线与仿真的对比图,可以看出二者吻合较好。最终观测器测到的电枢末速度达到了210 m/s,根据动能和前级脉冲功率储能计算,整个装置效率达到了34.7%,试验表明本文研究触发控制方法的有效性。

图16 位置速度曲线对比Fig.16 Curves of comparison of the position and velocity
5 结 论
线圈炮电枢电磁推力与线圈炮和电枢之间位置密切相关,通过电流丝法的方程具有高阶非线性变系数方程,控制线圈炮的各级触发具有很大困难。基于电枢位置和速度,可以获得较好的发射效果。由于电枢运动时的高加速和高速度,给电枢轨迹获取带来难题。本文提出一种在电枢设置反光编码条纹在线圈侧面布置光电传感器,再将各级信号级联获得电枢位置的方法,设计了Luenberger观测器来得到连续的电枢位置和速度,解决了只能获得离散的位置信息,不能用于后续控制的问题。计算发现267 Hz对于当前发射系统是最优的观测器参数。最后,通过30级线圈发射试验对本文研究进行了检验,发射末速度达到了210 m/s,整个装置效率达到34.7%。这表明本文提出的光电传感器和轨迹观测方法可以有效用于多级线圈炮的触发控制,能够满足高速高加速应用场景。同时为解决环境光或发射时的背景光干扰,可采用特定波长光波、增大光强、信号的冗余检测等措施,进一步提升系统可靠性。
