电磁发射直线感应电机多约束改进间接矢量控制策略
2022-09-14朱俊杰吴志程许金孙兴法韩一
朱俊杰, 吴志程, 许金, 孙兴法, 韩一
(海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉 430033)
0 引 言
直线电机驱动凭借其机械结构简单、运行能耗低、定位精度高等优势,已被广泛应用于轨道交通、航空航天、数控机床、工业自动化等传动领域[1-2]。近年来,大容量脉冲储能技术和电能变换技术的突破,更是引起了国内外对直线电机驱动应用于电磁发射的广泛兴趣[3]。
与周期性平稳运行的轨道交通牵引系统不同,电磁发射是一种非周期瞬态运行模式,由于定子导轨长度约束,发射过程具有高加速短行程的运动特点,对直线电机的推力输出性能提出了很高的要求。值得关注的是,电磁发射在不同应用场景下的负载特性迥异,如航天卫星、深海探测器、舰载武器、车载超音速弹丸等等[4],相关的体积、重量约束也会严重限制电磁发射能源系统的电压等级和耐受电流,从而对发射电机控制策略的抗扰性和通用性提出了严峻的挑战。
直线感应电机控制理论与旋转感应电机基本相同。不过,直线电机磁路的不连续性会引入边端效应,导致电机参数动态变化,影响电机输出推力与控制性能[5-7]。Duncan等人[8]率先提出了考虑动态边端效应补偿的直线感应电机等效电路模型,为直线电机的优化控制提供了理论基础。Han Zhengqing等人[9]采用有限元法分析得出,在考虑边端效应的情况下,直线感应电机定子绕组采用星接法时的输出推力和电流对称性显著优于开口接法和三角接法,且变转差频率控制方法可有效提高电机输出推力,改善电流的不对称性。
目前关于直线感应电机的应用研究主要集中于磁悬浮等直线牵引系统,性能研究主要集中于损耗抑制[10-11]和推力优化[12-31],控制研究主要集中于滑差频率控制[12-16]、磁场定向矢量控制[17-22]和模型预测控制[23-27]。直线感应电机在运行中具有参数动态变化的特性,如间隙、互感、磁密等,滑差频率控制可有效避免参数时变对控制性能产生的影响。但在恒滑差频率控制下,由于动态边端效应的影响,直线电机在高速运行区域的输出推力会严重下降[12]。Jaewon等人[13-14]针对中高速磁悬浮直线感应电机不同工况下的运行方式,采用有限元法分析了变滑差频率/速度对电机法向力和输出推力的影响,提出一种基于恒定法向力的变滑差频率控制方法,提高了电机的推进效率。Deng Jiangming等人[16]基于直线感应电机的T型数学模型,研究了考虑动态边端效应的相对最大电磁力变滑差控制策略,并针对电机动态参数提供了离线辨识方案。上述转差频率控制方法虽实现简单,鲁棒性强,但由于标量控制的缺陷,无法保证控制性能。
旋转感应电机磁场定向控制理论的成熟为直线感应电机提供了新的研究方向。Sergei等人[17-18]根据直接磁场定向原理,采用动态输出反馈线性化补偿技术,实现感应电机的最大转矩安培比直接推力控制,提高了机电能量转换的效率,但推力脉动较大,不适用于电磁发射等对动态响应精度要求高的场合。Sun Xiao等人[19]研究了长初级双边直线感应电机的间接磁场定向控制策略,通过补偿励磁电流和减小转矩电流来维持气隙磁链的恒定,抑制电机运行中参数动态变化引起的推力波动,但不适用于动态边端效应显著的短初级直线感应电机。Wang Ke等人[20-21]在考虑逆变器输出限制的条件下,建立了基于速度-推力曲线的最优滑差查找表,提出一种基于最优滑差频率的改进间接磁场定向控制方法,在不增加初级电流的情况下,一定程度上提高了电机的平均输出推力,但由于最优滑差的不连续问题,无法达到理论推力最大化,而且控制性能严格受限于查找表的存储容量和离散误差。Hossein等人[22]利用直接推力控制的高响应速度与矢量控制的平滑性,提出一种考虑动态边端效应补偿的矢量与直接推力联合控制策略,获得了相较于传统矢量控制更优的动态响应性能。
模型预测控制是近年来的一个研究热点。它通常以特定控制目标为优化函数,以速度、定子磁链、转矩等为控制对象,通过寻求某一控制输出实现控制目标最优[23]。Xu Wei等人[24]提出一种基于有限集模型预测控制的直线感应电机推力最大化技术,以给定/预测推力误差和初级电流/次级磁链相角误差构建优化函数,实现最大推力安培比的直线感应电机恒推力运行。模型预测控制具有较快的动态响应速度,但稳态性能受限于建模精度,对电机参数变化比较敏感;而且算法复杂度高,计算量大,现阶段受硬件处理能力的限制,通用性不强[25-27]。
上述研究工作多集中于轨道交通等直线牵引系统,针对电磁发射直线电机控制的研究还鲜有报道。以电磁发射用短初级双三相直线感应电机为研究对象,深入探究电机输出推力与励磁电流、转矩电流以及运动速度之间的相互耦合变化关系。针对电磁发射高加速短行程、不同应用场景负载差异显著的特性,提出一种通用化的电磁发射直线感应电机多约束改进间接矢量控制策略,在逆变器电流约束、直流电压约束以及电机行程约束下,实现直线感应电机最大推力安培比输出与最大推力运行,使得负载在最短行程内加速至目标速度。与传统基于查找表的恒/变滑差间接矢量控制方法相比,提出的改进间接矢量控制策略可有效避免查表法引入的最优滑差离散误差,使电机在相同电流等级下以理论最大平均输出推力运行,进一步降低负载的行程需求,减小直线感应电机的体积重量,提高电磁发射系统的通用性。
1 直线感应电机数学模型
多约束改进间接矢量控制策略的研究对象为短初级双三相直线感应电机,初级2套三相绕组空间相位差30°,如图1所示。双三相直线感应电机从静止坐标系到同步旋转坐标系的Park坐标变换矩阵为:
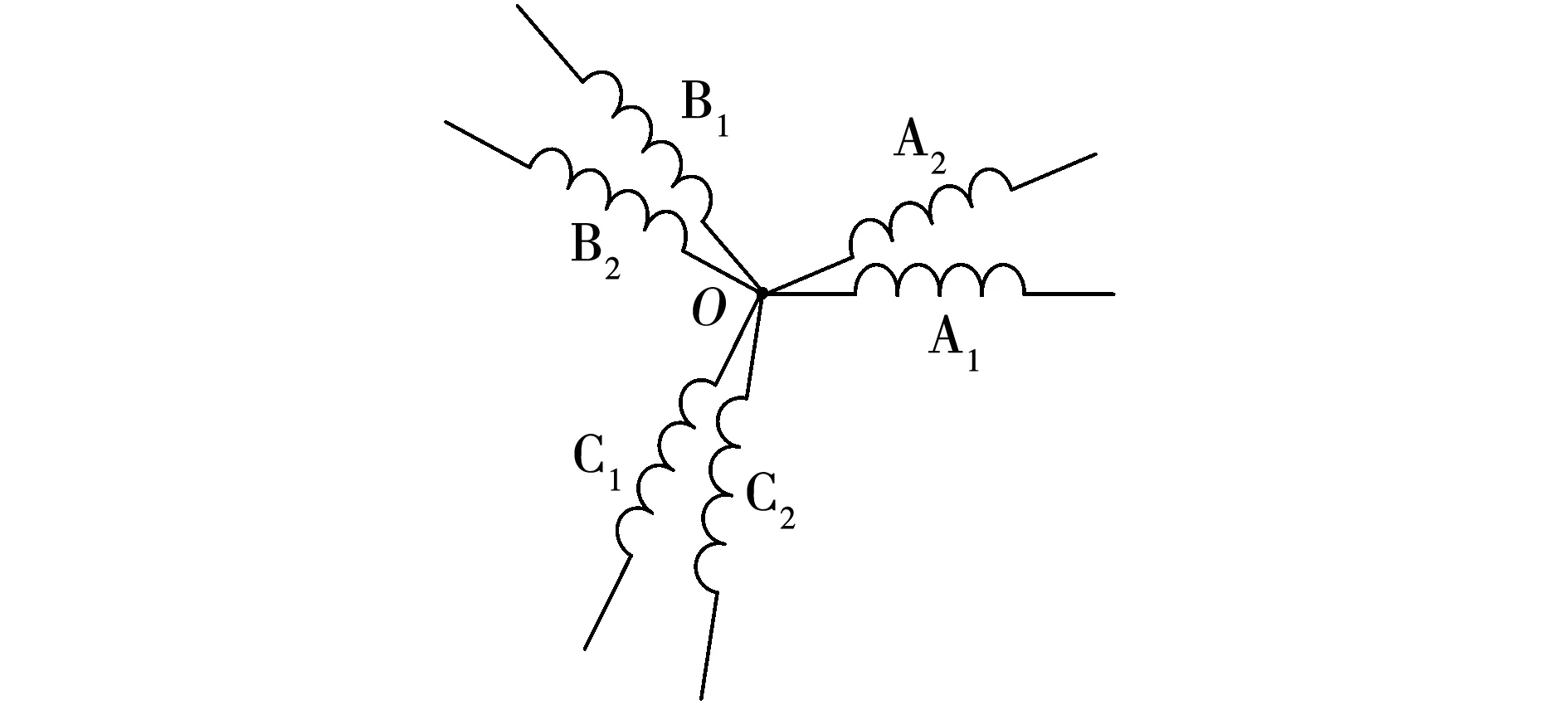
图1 双三相直线感应电机绕组分布Fig.1 Winding distribution of double three-phase linear induction motor
(1)
在考虑动态边端效应的情况下,建立同步旋转坐标系下双三相直线感应电机的等效电路,如图2所示。其中,初级电压、电流和磁链矢量满足:
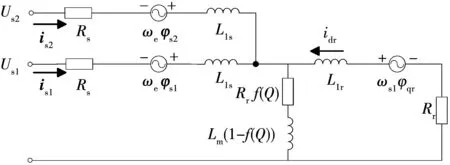
图2 双三相直线感应电机等效电路Fig.2 Equivalent circuit of double three-phase linear induction motor
(2)
动态边端效应补偿系数[8]满足:
(3)
根据等效电路可得同步旋转坐标系下双三相直线感应电机的动态数学模型。
a)电压方程:
(4)
b)磁链方程:
(5)
c)电磁力方程:
(6)
数学模型中各向量、矩阵符号分别如下:
2 推力特性分析
忽略励磁损耗,基于次级磁场定向矢量控制控制原理,将d轴定向到次级磁链,可得次级磁链为
(7)
次级磁链与转差角速度的关系为
(8)
直线感应电机输出电磁力计算为
(9)
直线感应电机输出电磁力随励磁电流、转矩电流、动子运动速度的变化关系为
(10)
设定电机初级相电流峰值阈值为Imax,即
(11)
根据基本不等式可得,在相电流峰值Imax的约束下,当励磁电流与转矩电流大小相等时,电机输出最大电磁力,即
(12)
此时,励磁电流与转矩电流大小满足
(13)
事实上,不妨令Iqs1=Iqs2=kIds1=kIds2,在相电流峰值Imax的约束下,电机输出电磁力(归一化)随转矩/励磁电流比例系数k以及动子运动速度v(归一化)的变化关系如图3所示。可以看出,k=1时对应电机最大输出推力;而且受动态边端效应影响,电机最大输出推力随运动速度的提高逐渐下降。
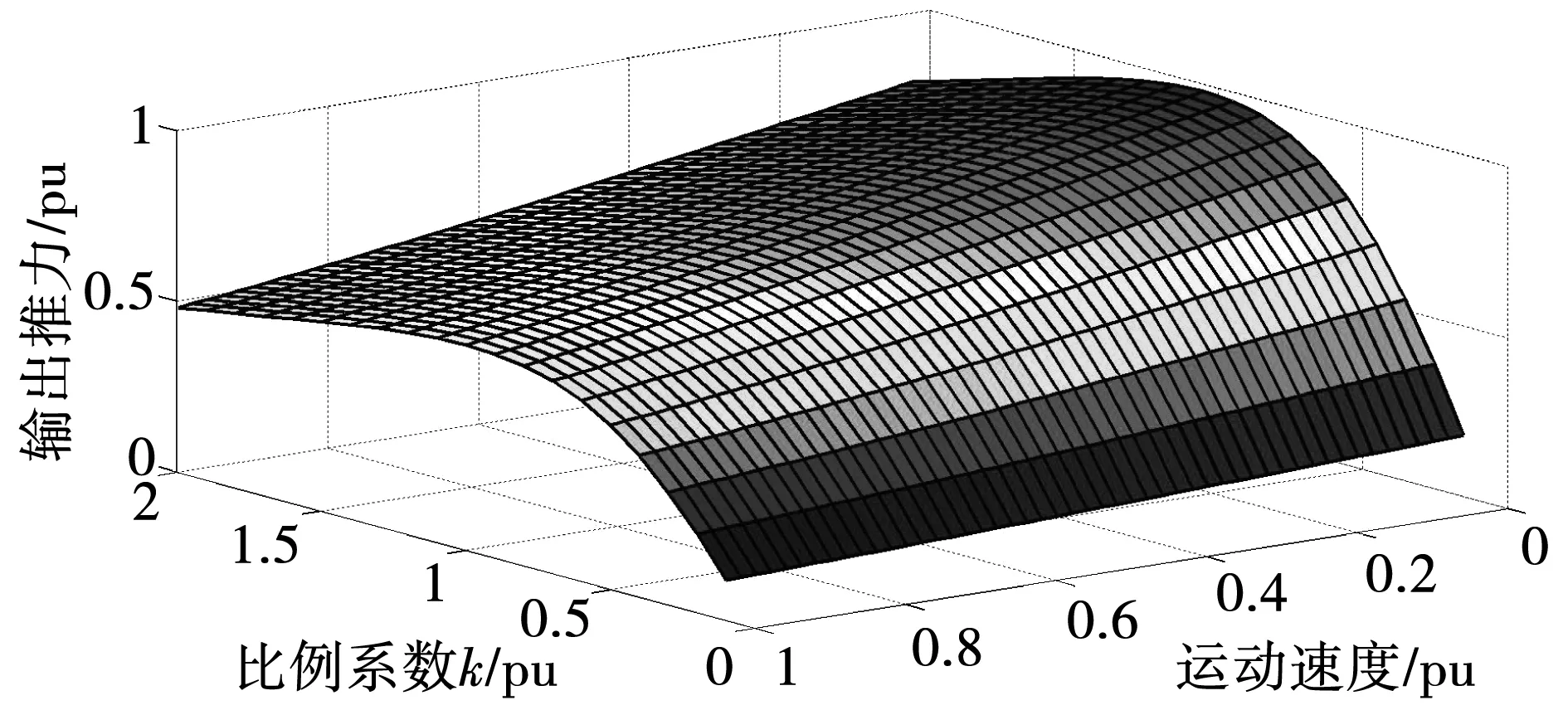
图3 输出推力特性Fig.3 Output thrust characteristics
3 传统矢量控制策略分析
3.1 恒滑差间接矢量控制
考虑动态边端效应补偿的恒滑差频率间接矢量控制流程如图4所示。根据给定推力Fcmd查表获取给定电流Is和给定转差角速度wsl;由式(7)和式(8)可推得给定励磁电流和给定转矩电流分别为:

图4 恒滑差间接矢量控制流程Fig.4 Constant slip indirect vector control process
(14)
d轴和q轴电流的给定与反馈误差经PI调节器输出为d轴和q轴的参考电压;dq轴参考电压经Park变换送入电能变换调制模块,控制逆变器的交流输出。
传统恒滑差间接矢量控制方法在不采用轨迹闭环时,可根据当前工况提前计算好给定励磁电流和给定转矩电流,在线计算量小,硬件实现简单;但未考虑动态边端效应的影响,无法保证运行在最优滑差点,电机输出推力性能较差。
3.2 变滑差间接矢量控制
短初级双三相直线感应电机在恒电流条件下的推力特性曲线如图5所示,其中fe为供电频率,fs为滑差频率。可以看出,随着电机运动速度的提高,最大输出推力工作点对应的滑差频率也逐渐增大。Wang Ke等人[20-21]据此提出一种考虑动态边端效应补偿的变滑差频率间接矢量控制方法,如图6所示。在每个控制周期,根据运动速度v和给定推力Fcmd查表获取给定电流Is和最优转差角速度wsl,根据式(14)实时计算动态边端效应补偿的给定励磁电流和给定转矩电流。

图5 恒电流推力特性曲线Fig.5 Constant current thrust characteristic curve
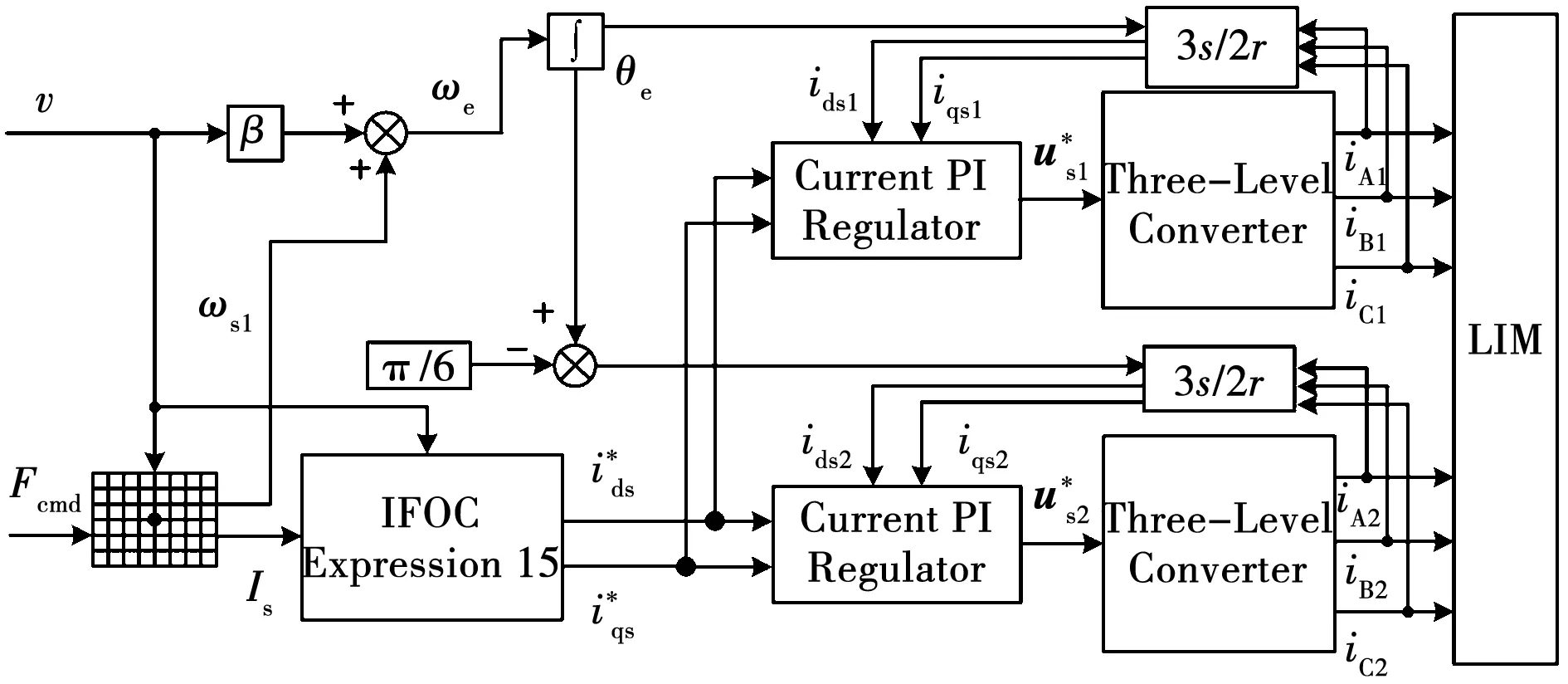
图6 变滑差间接矢量控制流程Fig.6 Variable slip indirect vector control process
变滑差频率间接矢量控制通过查表实时更新给定滑差频率,使得电机始终运行于最大输出推力工作点附近,可有效提高电机的平均输出推力。但由于最优滑差频率的不连续问题,无法实现理论上的推力最大化;而且查表法的控制性能严格受限于查找表的存储容量。该方法必须结合大量仿真和实验结果进行查找表的制作,表格的离散精度越高,引入的最优滑差离散误差越小,但制作越困难,在实际工程应用中存在繁琐、数据量大、精致精度低的缺陷。
4 多约束改进间接矢量控制策略
上述两类间接矢量控制方法的实质是在给定滑差频率的条件下,利用次级磁场定向原理计算给定励磁电流和给定转矩电流,实现电流闭环控制;Wang Ke等人的变滑差频率间接矢量控制方法也未突破人工设定滑差频率的局限性。这类方法使得直线感应电机输出推力性能无法达到理论最优,不能很好地适应电磁发射场景下直线感应电机的高加速短行程运行模式。
从第2节电机的推力特性分析可知,在次级磁场定向条件下,电机最大输出推力工作点对应于转矩/励磁电流比例系数k=1。通过控制转矩电流与励磁电流的比例系数,可有效避免人工设定滑差频率引入的离散误差等问题,实现直线感应电机在相同电流等级下恒以理论最大输出推力运行。因此,提出一种通用化的电磁发射直线感应电机多约束改进间接矢量控制策略,如图7所示。
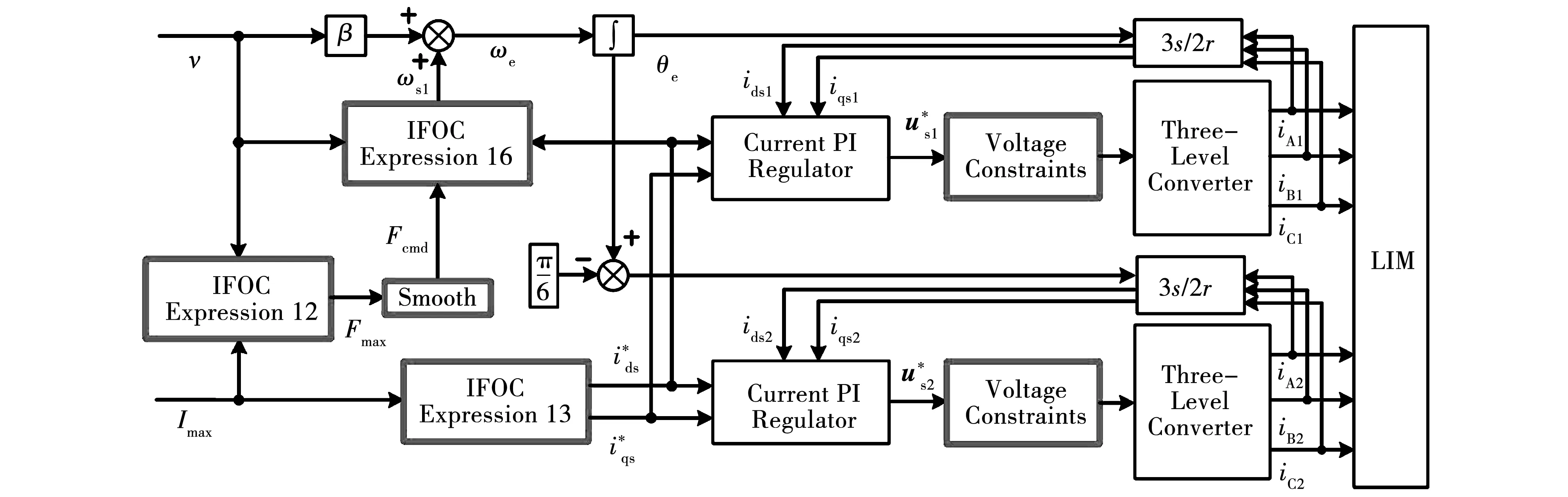
图7 多约束改进间接矢量控制流程Fig.7 Multi constraint improved indirect vector control process
在每个控制周期,根据逆变器最大电流约束Imax、电机运动速度v和式(12)实时更新电机理论最大出力Fmax,给定力Fcmd从0以特定斜率上升;当给定力Fcmd上升至理论最大值Fmax后,两者保持一致,并且在动态边端效应影响下,随运动速度的提高逐渐下降;给定励磁电流和给定转矩电流通过式(13)计算得到;给定转差角速度通过下式计算得到:
(15)
d轴和q轴的参考电压通过下式做约束处理:
(16)
式中:i=1或2代表直线感应电机的2套三相绕组;Udci代表直流母线电压;λ代表调制系数。
所述控制策略将单次电磁发射过程划分为4个阶段,主要流程如下:
3)最大推力运行阶段,励磁电流与转矩电流保持恒定,比例系数k=1,电机输出推力随速度升高呈下降趋势;
4)制动阶段,根据剩余行程和式(17)判断是否转入制动阶段,电机输出电磁力从正向推力按设定时间常数指数下降为反向制动力,实现动子制动,即
(17)
式中:x代表电机当前位置;X代表总行程;m代表负载总重量。
在逆变器电流约束、直流电压约束以及电机行程约束下,所提出的改进策略通过控制转矩/励磁电流比例系数k恒为1,实现次级磁场定向条件下直线感应电机的最大推力安培比输出与最大推力运行,与现有的控制方法相比,可有效避免查表法引入的最优滑差离散误差,在相同电流等级下以理论最大平均输出推力运行,降低负载的行程需求。
5 仿真验证
为验证所述多约束改进间接矢量控制策略的有效性,基于MATLAB/Simulink搭建了双三相直线感应电机和间接矢量控制的仿真模型,分别实现考虑动态边端效应补偿的恒滑差间接矢量控制、变滑差间接矢量控制和提出的改进间接矢量控制方法,对比不同控制策略下电机电流特性、滑差特性、输出推力特性和运动特性。仿真设定的目标速度为20 m/s,行程约束为10 m。仿真参数如表1所示。

表1 仿真模型的参数Table 1 Parameters of simulation model
方法1为恒滑差间接矢量控制,方法2为变滑差间接矢量控制,方法3为改进的间接矢量控制方法。三种方法在电机加速阶段的仿真结果分别如图8、图9、图10所示。
方法1的仿真结果如图8所示,在电机加速阶段推力受动态边端效应影响逐渐下降,滑差频率保持恒定,d轴电流逐渐增大,q轴电流逐渐减小,整个过程中无法保证电机运行在最优滑差点,最终电机无法达到目标速度。
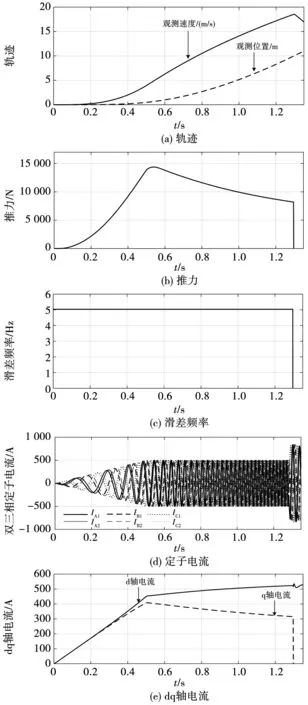
图8 恒滑差间接矢量控制仿真结果Fig.8 Simulink results of constant slip indirect vector control
方法2的仿真结果如图9所示,在电机加速阶段推力下降率小于方法1,滑差频率逐渐增大。根据图9(e)可知,由于查表带来的离散误差,d轴、q轴电流难以严格保持相等。
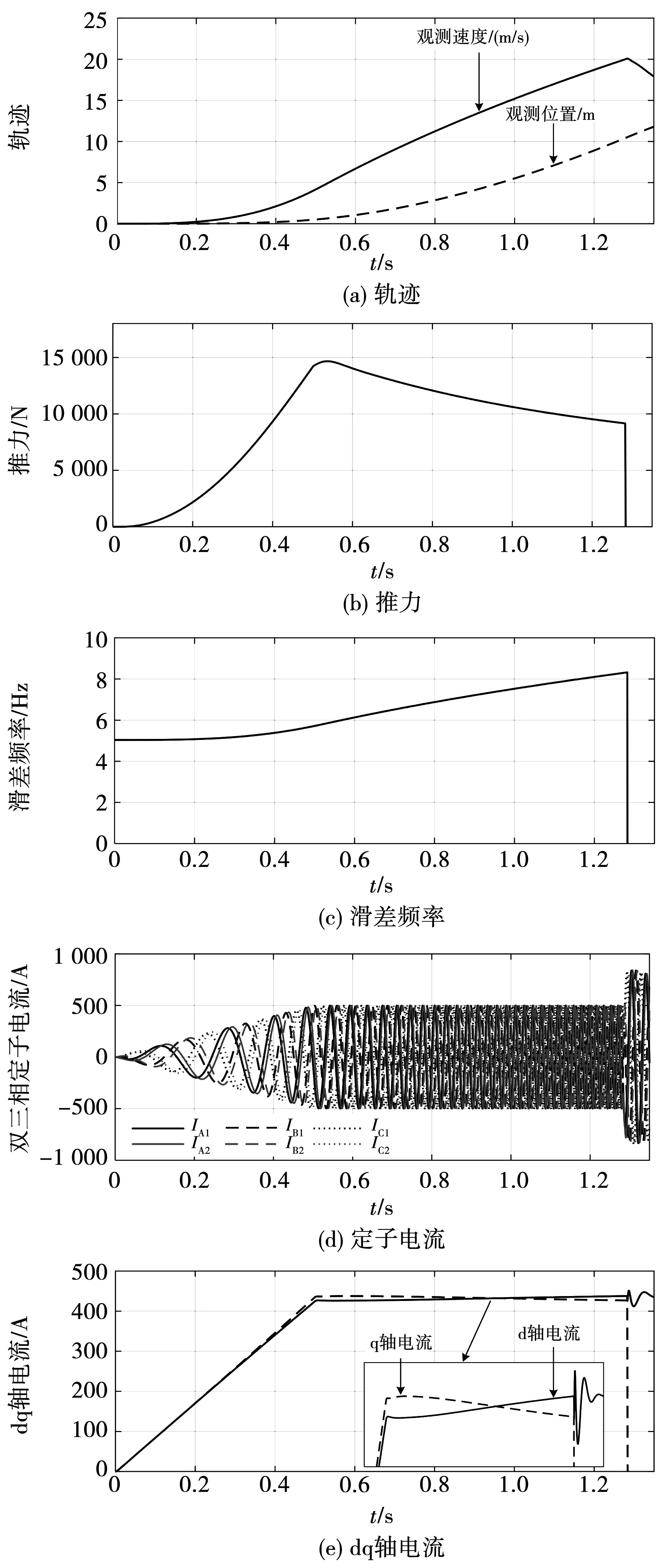
图9 变滑差间接矢量控制仿真结果Fig.9 Simulink results of variable slip indirect vector control
对比图8(d)和图9(d)电流曲线,在相同电流输出的情况下,方法2输出推力大于方法1,整个过程中能够基本保证电机运行在最优滑差点。最终电机达到了目标速度。最终电机达到目标速度,但是,由于查找表引起的离散误差,很难保持d轴和q轴电流严格相等。该方法需要根据大量的仿真和实验结果制作查找表,控制性能受查找表的连续性和存储容量的严格限制,实际应用复杂且难以实现。
改进的间接矢量控制方法的仿真结果如图10所示。由图10(e)可知,仿真效果优于方法2,d轴电流和q轴电流可以基本保持相等,避免了查找表引入的最佳滑差分散误差。所提出的改进策略通过将每安培转矩比系数k控制在1,并在不增加直线电机一次电流的情况下以理论最大平均输出推力运行,从而实现电机在二次磁场定向条件下的每安培最大输出推力和最大推力运行。
图10 多约束改进间接矢量控制仿真结果Fig.10 Simulink results of multi constraint improved indirect vector control
6 实验验证
为了对比验证了三种控制策略的性能,搭建了短初级双三相直线感应电机实验平台,采用储能单元和单相逆变器为电机单相供电的方式。实验电机的参数与表1的仿真参数一致,设定的目标速度为30 m/s,行程约束为10 m。
三种控制策略的各相电流以及dq轴电流实验结果如图11所示。

图11 电流对比实验结果Fig.11 Experimental result of current comparison
图11(a)为三种控制策略的双三相定子电流,前0.6 s左右为加速阶段,当速度达到设定值后,电机转入制动阶段。图11(b)为dq轴电流对比,恒滑差简介矢量控制策略下,dq轴电流无法保持相等,不能确保电机运行在最优滑差点,而变滑差间接矢量控制和多约束简介矢量控制的dq轴电流从实验结果来看都基本保持相等。
三种控制策略的推力、速度和滑差频率对比结果如图12所示。由图12(a)和(b)可知,方法1的平均输出推力明显小于方法2和方法3,方法1达到目标速度时间为0.68 s,方法2和方法3的时间为0.63 s,减少了7.4%。由图12(c)可知,方法1的滑差频率保持恒定,而方法2由于查找表引起的离散误差,很难保持d轴和q轴电流严格相等,滑差频率始终小于方法3。实验结果与仿真结果一致,验证了多约束间接矢量控制的有效性和先进性。
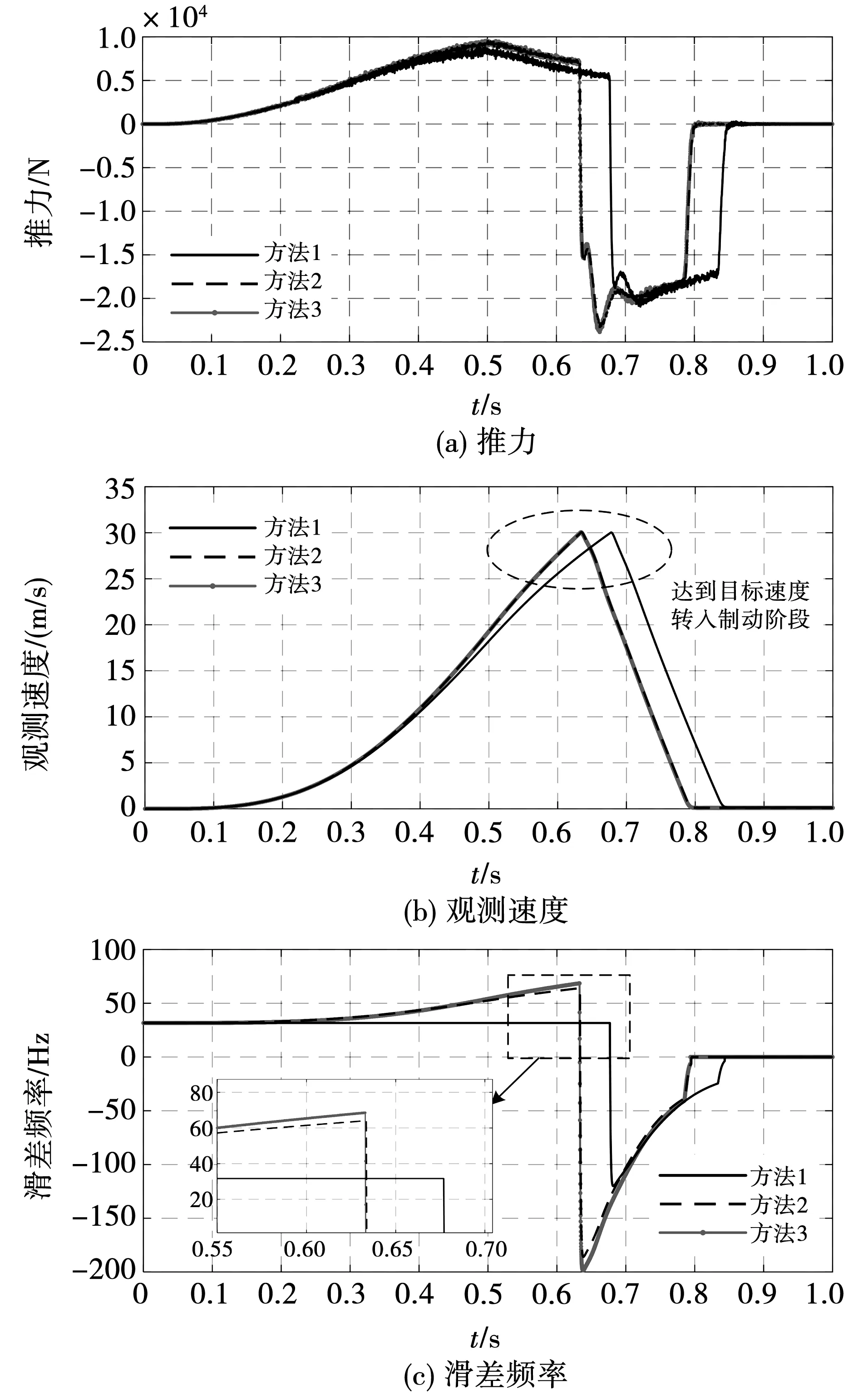
图12 推力、速度和滑差频率实验结果Fig.12 Experimental results of thrust,velocityand slip frequency
7 结 论
1)在相电流峰值Imax的约束下,当d轴电流与q轴电流相等时,电机能够工作于最佳滑差频率点,此时电机能够实现最大推力输出。
2)在动态边端效应影响下,采用恒滑差频率矢量控制无法保证电机工作在最佳滑差频率点,电机的推力输出能力受到限制,最终导致电机难以达到控制目标。
3)多约束改进间接矢量控制可以使电机工作在最佳转差频率点,实现最大推力输出,达到目标速度的时间缩短了7.4%,且dq轴电流控制效果优于查表法,避免了最优转差离散误差。该方法具有较好的控制性能和简单的实现方法,对实际应用具有指导意义。
