“育鲲”轮减摇鳍装置收/放鳍电气故障实例
2022-08-06汪旭明许长青张均东
汪旭明,许长青,张均东
(1.大连海事大学船舶电气工程学院,辽宁 大连 116026,2.大连海事大学轮机工程学院,辽宁 大连 116026)
“育鲲”轮是我国自主设计的第一艘专用远洋教学实习船,是航海技术、轮机工程、船舶电子电气工程专业及陆上部分专业进行海上实习的平台,同时也执行出国访问等重要任务。船上配置了大量的教学实习和科研设备,采用了Brown Brothers Aquarius 50 系列折叶式减摇鳍,以满足船舶对安全性、适航性、舒适性的较高要求。本文介绍了“育鲲”轮减摇鳍装置电气液压控制的工作原理,基于减摇鳍装置放鳍和收鳍故障实例对其控制系统进行排查,确定电气故障并处理使其恢复正常运行。
1 减摇鳍工作原理
如图1,减摇鳍液压系统由液压动力单元和内接管构成。液压系统提供的液压动力与控制信号交互作用,用油缸来操作鳍的上升或下降以及收鳍和放鳍。主泵/电动机组由液压油泵26、电动机24 和卸载阀32 构成。卸载阀32 得电时闭合,泵的流量全部用于鳍的操作功能。卸载阀32 断电时打开,主双联泵的高流量单元在低压状态下直接回到油箱,低流量单元输出用于收鳍/放鳍操作。除了鳍上升和下降的稳定操作外,在启动、收鳍/放鳍及所有其他操作中,高流量单元都在卸载,使得电动机可以在最小负载状态下启动,收鳍/放鳍操作和鳍对中操作可以慢速进行。

图1 “育鲲”轮减摇鳍装置液压系统图
1.1 放鳍和收鳍工作原理
在放鳍(收鳍)操作中,电磁阀1 右侧放鳍(左侧收鳍)线圈得电,使得液压油通过平衡阀箱36 中的平衡阀36.1(36.2)的通道进入收鳍和放鳍油缸左侧(右侧)的环形区域,把活塞杆向右推回原位(外伸)。同时,液压油被送到对面的平衡阀36.2(36.1),目的是打开平衡阀36.2(36.1),油缸右侧(左侧)的液压油在油缸活塞作用下流回油箱。放鳍(收鳍)动作完成后,线圈断电。
1.2 鳍的上升和下降工作原理
鳍的上升和下降通过电液比例阀17 实现,比例阀由比例螺线管操纵,为流向鳍上升或下降油缸的液压油提供流量和方向控制。在鳍片的上升过程中,比较放大器输出鳍角差电流信号给比例阀17,比例阀右边的螺线管得电,线轴向左移动,移动距离与电流信号强度成正比,液压油经过比例阀供到上升和下降油缸的左端,鳍上升,上升的角度与电流信号强度成正比。在鳍的下降过程中,比例阀17 左边的螺线管得电,线轴向右移动,鳍下降。比例阀出口的两个液压油管路之间设有手动旁通阀13 和溢流阀组2,过载时溢流阀组2 使得高压可以从压力管路释放到回油管路。
当负载感应隔离阀11 得电时,负载感应启动。用来使鳍上升或下降油缸里的活塞某一侧较高的压力,通过背对背单向阀15 和补偿器箱18 传递到压力补偿器3的顶上,补偿器在整定值下打开增加旁通量,以降低高压活塞那一侧的压力。
1.3 减摇鳍应急操作
应急泵/电动机组由齿轮泵27 和电动机25 组成,把低量压力油通过单向阀8 送入分配阀箱16,在紧急情况下,收鳍/放鳍电磁阀1 和比例阀17 可以手动操作分别控制收鳍/放鳍和鳍上升或下降。此外,左右舷液压动力单元各有一个紧急停机按钮开关,用于紧急停止减摇鳍电机或靠港时锁定减摇鳍禁止启动。
2 故障现象与排查分析
2.1 故障现象
某航次由大连港至连云港航行期间,减摇鳍为驾驶台遥控,放鳍操作过程中,驾驶台和本地控制单元的触摸屏上右舷减摇鳍Extended 指示灯亮(放鳍到位),并且进入了船舶稳定的程序,鳍角正在正常摆动;此时左舷减摇鳍Extending 指示灯却一直闪烁(表明左鳍正在伸出未到位),并持续此状态。操作左右减摇鳍收鳍后再重新放鳍,故障依旧。此外,左舷减摇鳍收鳍操作过程中系统出现报警“Port fin failed to lock in time”,并且驾驶台和本地控制单元的触摸屏操作面板上的左舷减摇鳍HOUSED 指示灯不亮(收鳍未到位),经机旁检查此时左舷减摇鳍已经收回。
2.2 故障排查分析与处理
减摇鳍系统报警信息中文意思为“鳍片未能及时锁定”,表明收鳍操作叶片进入锁定位置的耗时超过了允许的时间。经过分析系统的控制原理,可以得出可能的原因有:
(1)收鳍/放鳍液压系统阻塞;
(2)收鳍/放鳍液压系统泄漏;
(3)收鳍/放鳍液压系统中有空气;
(4)主泵故障;
(5)PLC 数字量输出故障,收鳍电磁线圈故障;
(6)PLC 模拟量输入故障,收鳍/放鳍位置反馈传感器故障。
由于操作减摇鳍实际已经收鳍完成,说明液压系统工作正常,初步排除主泵故障和液压系统阻塞、泄漏或进气等故障。
船舶抛锚后,将减摇鳍转为本地离线控制,这样可以在减摇鳍间的本地控制单元进行收鳍和放鳍的操作。本地控制单元的控制器为西门子PLC,由中央处理器CPU315-2 DP、数字量输入/输出模块DI/DO、模拟量输入输出模块AI/AO 组成。通过触摸屏进行人机交互,提供手动收鳍/放鳍功能,以及提供鳍片角度、鳍片位置(收鳍、正在收鳍、放鳍、正在放鳍)的状态信息和视听警报。操作点击“EXT.AND CENTRE”进行放鳍操作,放鳍完成后点击“HOUSED”进行收鳍操作,在本地控制单元的硬件信息页比对左鳍和右鳍在收放鳍过程中对应PLC 的输入和输出,并观察和测量收鳍/放鳍电磁阀1、负荷感应隔离电磁阀11、泵卸载电磁阀32的动作情况。
收鳍操作时,左右舷减摇鳍对应电磁阀动作时序相同,排除左舷PLC 数字输出故障和收放鳍电磁阀故障。进一步排查PLC 模拟量输入和收鳍/放鳍位置反馈传感器。
放鳍操作时,左舷减摇鳍动作时序有误:检查左鳍触摸屏的硬件信息页的PLC 数字量输出DO 的相应状态为OFF,电磁阀负荷感应隔离电磁阀11、泵卸载电磁阀32 的线圈未得电。默认PLC 程序执行正常且无硬件故障,则判断PLC 输入条件不满足,即收/放鳍位置反馈传感器送给PLC 模拟量输入模块4-20 mA 的电流信号有误,放鳍操作中左鳍Extending 指示灯持续闪烁,无法进入稳定程序进行鳍上升和下降操作。
检查收/放鳍位置反馈传感器,在触摸屏硬件信息页观察比对左右舷减摇鳍收鳍/放鳍操作过程中对应输出的电流信号,记录数据如下:左舷放鳍到位时的位置反馈传感器电流信号为4.41mA,收鳍到位时的位置反馈传感器电流信号为19.05mA;右舷放鳍到位时的位置反馈传感器电流信号为4.30mA,收鳍到位时的位置反馈传感器电流信号为18.91mA。可以看出左舷减摇鳍位置反馈传感器的输出电流信号偏大0.12mA 左右,可能是导致本次故障的原因。
检查左舷减摇鳍收/放鳍位置反馈传感器的信号线1 和2 接入本地控制单元的接线排TB1 的29、30 端子处,将信号线1、2 在控制箱的接线端子处拆下,通过信号发生器在29、30 端子处通过恒流源装置接入18.91mA的电流信号,此时左舷HOUSED 指示灯亮。即确认了故障:因位置反馈传感器的信号偏差,放鳍操作时鳍片伸出已到位但是反馈电流偏大,导致控制系统识别放鳍未到位,PLC 无相应数字输出,负荷感应旁通阀电磁阀11、泵卸载电磁阀32 不得电,系统仍指示“Extending”,无法进入船舶稳定、鳍角摆动的程序;收鳍操作时,鳍片收回已到位但是反馈电流偏大,控制系统识别收鳍未到位,收鳍时间过长导致系统发出“Port fin failed to lock in time”报警,且HOUSED 指示灯不亮。
如图2所示,在左舷收鳍/放鳍位置反馈传感器的信号输出端1 和2,通过串并联的两个电阻(R1 为1.1 Ω,R2 为2.8 kΩ),使传感器输出信号分流后送至接线端子29、30 接入PLC 模拟量输入模块。如图3所示,此时电流减小至18.917mA,左舷鳍片收回状态HOUSED指示灯点亮。通电运行,收/放鳍操作试验其功能,系统恢复正常运行。

图2 位置传感器信号改接图
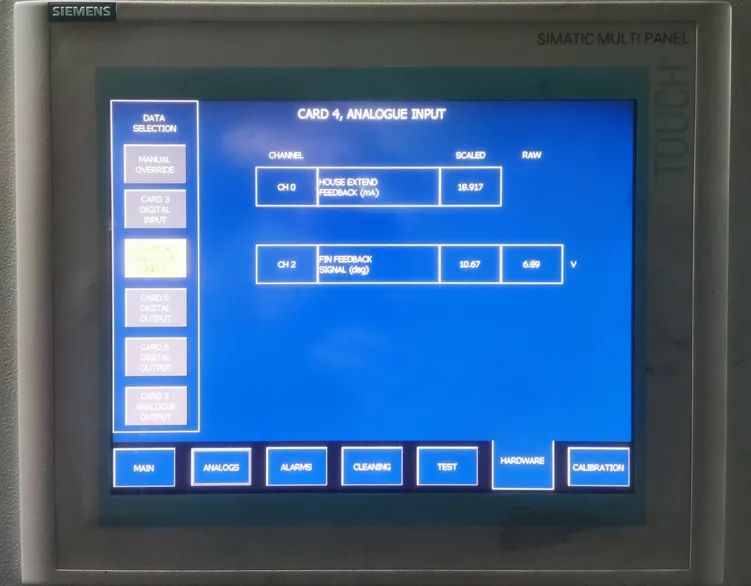
图3 左舷减摇鳍本地液晶显控单元
3 结束语
本文介绍的“育鲲”轮减摇鳍装置放鳍和收鳍故障的直接原因是收鳍/放鳍位置反馈传感器信号偏移所致,抛锚中通过收鳍/放鳍操作试验,实测位置反馈电流数据通过串并联电阻分流进行处理,解决了收鳍/放鳍故障,保障了船舶航行和教学实习训练任务。通过本文对该故障实例分析和排查处理为同类型减摇鳍装置故障解决提供参考。