直升机传动轴支座运动机构可靠性分析
2022-05-08樊高宇王永志
樊高宇,王永志,闫 轲
(1.中国飞行试验研究院 飞机飞行试验技术研究所,陕西 西安 710089;2.中国飞行试验研究院 测试技术研究所,陕西 西安 710089)
对可靠性理论和方法的研究可以追溯到二十世纪四十年代,其到二十世纪八十年代已经较为成熟。到目前为止,比较成熟的分析方法包括:Monte Carlo法、响应面法、一次二阶距法等,同时学者们为了进一步提高计算精度和效率还提出了各种代理模型。尤其是Monte Carlo法凭借较强的工程适应性,大量运用于工程中复杂结构、机构的可靠性分析。同时,科研人员对于运动机构的可靠性分析也开展了很多研究,特别是基于动力学仿真的可靠度分析。Cheng等[1]以多轴机床为研究对象,基于Monte Carlo数值仿真分析了其运动精度可靠性,并计算了几何误差对可靠度的影响;Borgonovo等[2]论证了灵敏度分析在可靠性分析模型建立和结果评价中的重要性,并总结了近年来灵敏度分析方法的发展和现状;吕震宙[3]在《结构机构可靠性及可靠性灵敏度分析》中详细归纳了结构机构可靠性的理论及其计算方法;赵晓博等[4]基于Archard粘着磨损理论建立了舱门收放机构的运动精度可靠性分析模型,研究了磨损间隙对飞机舱门触发位置定位精度的影响。随着仿真技术的发展,仿真平台如Adams、Recurdyn等在机构可靠性研究方面运用越来越广泛。冯志杰等[5]综合MATLAB、Adams、AMESim平台建立飞机起落架机电液一体化仿真分析平台,对其运动精度可靠性进行分析。
1 机构形式及运动原理
直升机传动轴支座-摇臂机构如图1所示,该机构为硬式机械液压助力操纵系统,工作原理为:尾操纵拉杆支座在传动轴下方采用螺钉固定在尾梁上,拉杆通过从支座上水平伸出的摇臂实现连接。驾驶员通过踩踏脚蹬实现尾桨变距操纵时,拉杆顺着尾传动轴方向做近似直线往复运动,摇臂以支座为轴左右旋转、摆动。该机构在直升机操纵过程中承担重要的运动功能。

图1 支座-摇臂机构示意图
2 可靠性建模
本文主要研究机构的运动功能可靠性,即运动机构运动是否到位和准确,能否实现正常的运动功能。支座-摇臂机构运动功能失效模式归类为摇臂到位时间失效和支座轴-套接触力失效。支座-摇臂机构到位时间失效即摇臂无法在规定时间内摆动至指定的角度,与其他设备或部件形成干涉,影响系统运动功能的实现。支座轴-套筒接触力失效即由于支座轴和套筒间接触力过大导致支座轴发生破坏和断裂等强度失效,影响整个系统运动功能的实现。支座-摇臂机构在运动过程中既要保证摇臂在规定的时间到达指定位置,同时也要确保支座轴-套筒间接触力在合理范围内不致支座轴发生强度失效。
经过机构故障模式分析,支座-摇臂机构的性能指标为摇臂到位时间以及支座轴-套筒间接触力大小。两种失效模式下的指标相互串联,因此支座-摇臂机构运动功能可靠度为

式中,RT为摇臂到位时间可靠度;RF为支座轴-套筒间接触力可靠度。
(1)为了使机构可靠、安全地完成运动功能,摇臂摆动特定角度所需时间要满足要求,时间过长时影响其他机械动作的执行和操纵杆系操纵功能的实现,因此摇臂到位时间可靠性计算的功能函数为

式中,ΔT为展开时间的允许值,本文中根据实际情况设置为35 ms;T为摇臂实际到位时间时间;x1,x2,…,xn为影响摇臂到位时间的随机变量。
若g<0即认为摇臂到位时间时间失效,因此摇臂到位时间失效概率Pf为:

则摇臂到位时间可靠度为:

(2)支座-摇臂机构在运动过程中,支座轴-套筒间接触力如果超过一定许用值,往往会导致支座轴发生破坏甚至断裂影响机构正常运动功能的实现,因此支座轴-套筒间接触力可靠性计算的功能函数为:

式中,ΔF为支座轴-套筒间接触力允许值,本文中根据实际情况设置为1 500 N;F为实际接触力大小。
若G<0即认为支座轴-套筒间接触力失效,因此支座轴-套筒间接触力失效概率Pf为:

则支座轴-套筒间接触力可靠度为:

3 基于Adams的动力学仿真分析
将直升机传动轴支座-摇臂机构模型导入动力学仿真软件Msc.Adams中,根据实际情况在不同部件之间添加相应的运动副和接触。在摇臂孔中心处添加驱动力,驱动力方向沿拉杆轴向运动方向,使摇臂与套筒绕支座上端轴转动,如图2所示。

图2 添加驱动力
根据文献[6]中提供数据,拉杆拉力约为20 N,故将驱动力峰值设置为20 N,通过STEP函数拟合驱动力曲线。驱动力曲线如图3所示。
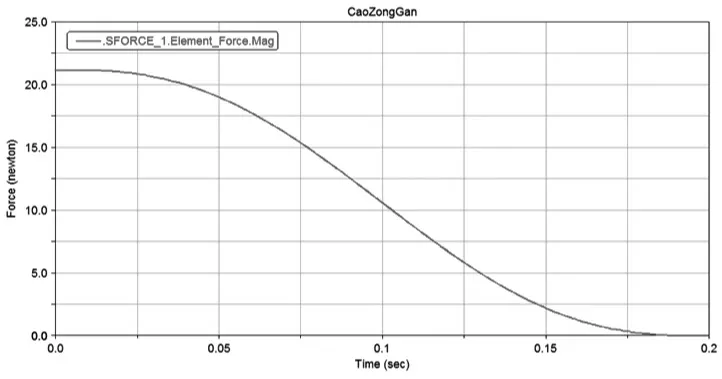
图3 驱动力曲线
考虑驱动力载荷、动摩擦系数、静摩擦系数和支座轴-套筒间运动副间隙等参数的随机性,将会直接影响支座轴与套筒处的接触力,将驱动力、动摩擦系数、静摩擦系数和运动副间隙设置为随机输入变量。驱动力标准值设定为20 N,最小值为18 N,最大值为22 N;动摩擦系数标准值设定为0.3 N,最小值为0.2 N,最大值为0.4 N;静摩擦系数标准值设定为0.5 N,最小值为0.4 N,最大值为0.6 N;支座轴-套筒间间隙标准值设定为0.15 mm,最小值为0 mm,最大值为0.3 mm。
根据支座-摇臂机构附近设备安装情况及操纵杆系运动情况,将摇臂摆动角度设为30°,设置时间传感器,测试摇臂转动规定角度到达指定位置的时间。同时测定支座轴-套筒之间接触力大小。将支座轴-套筒间接触力、摇臂到位时间作为输出变量,进行256次仿真试验,提取输出变量值。
支座轴-套筒间接触力试验结果分布如图4所示,图中横坐标为试验数,纵坐标为支座轴-套筒间接触力。可以看出,接触力最大值为1 655 N,最小值为521 N,其大小分布随机性较大,且主要集中在700~1 300 N区间内。摇臂到位时间试验结果分布如图5所示,图中横坐标为试验数,纵坐标为摇臂到位时间。可以看出,摇臂到位时间最大值为34.9 ms,最小值为28.3 ms,其大小分布较为均匀,且主要集中在29~32 ms区间内。
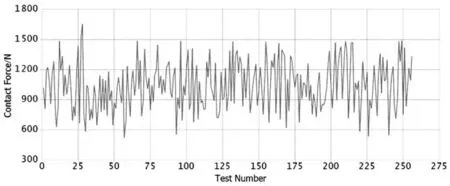
图4 支座轴-套筒间接触力试验结果
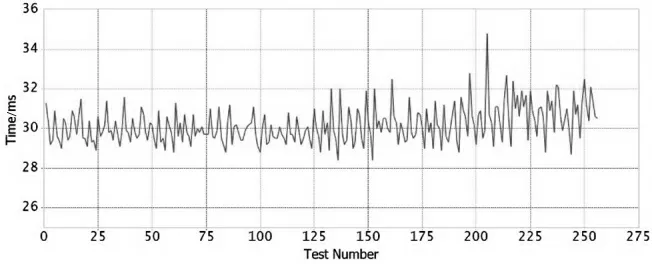
图5 摇臂到位时间试验结果
4 可靠度及灵敏度分析
4.1 确定随机输入变量
支座-摇臂机构在工作环境中,影响其可靠性的随机因素众多,大致可分为两类,一类为支座-摇臂机构自身的几何尺寸、形状参数以及零部件间间隙、摩擦等造成的不确定性,另一类为服役环境因素如支座-摇臂机构在工作时受到的载荷,如驱动力的影响。故选取随机输入变量参数见表1。
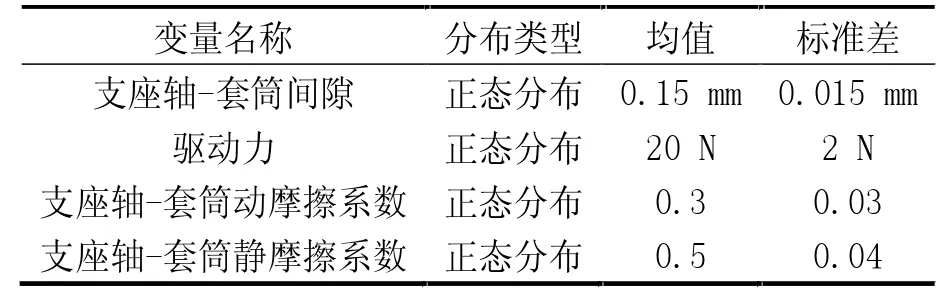
表1 随机输入变量参数
4.2 拟合失效功能函数
设定支座轴-套筒间间隙值为变量x1,动摩擦系数值为变量x2,静摩擦系数值为x3,驱动力值为x4。设定支座轴-套筒间接触力值为F,摇臂到位时间为T。对动力学仿真的试验结果进行拟合,得到多项式表达形式的接触力F随输入变量x1,x2,x3,x4的变化函数F(x1,x2,x3,x4)表达形式如下:

4.3 失效概率及可靠度计算
通过蒙特卡洛法进行大量抽样,抽样数为107次,求解失效概率和可靠度,结果见表2。在考虑支座轴-套筒接触力失效模式的情况下,机构失效概率为8.05×10-4,可靠度RF为0.999195,且失效概率方差为8.0475×10-9;在考虑摇臂到位时间失效模式的情况下,机构失效概率为3.64×10-4,可靠度RT为0.999636,且失效概率方差为3.6283×10-9。将两种失效模式下的可靠度代入式(5-7),计算其综合可靠度R为0.998831,可以看出,失效概率较小,可靠度较高,且方差较小说明Monte Carlo法的失效概率值稳定、收敛,计算结果可信。以上分析表明,结构设计较为合理,在当前的设计参数下能够满足其可靠性要求。
表2 失效概率及可靠度计算结果
4.4 灵敏度计算及分析
根据本节可靠度计算结果,进行灵敏度分析。对于灵敏度的计算,可以将可靠度计算结果代入式(9)和式(10)中,灵敏度计算结果见表3和表4。从表中可以看出:
表3 各随机变量的均值灵敏度
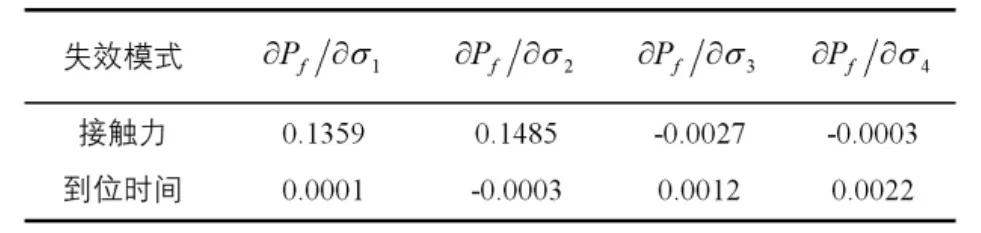
表4 各随机变量的标准差灵敏度
(1)对于失效模式为支座轴-套筒接触力时,机构失效概率与轴-套筒间间隙的均值、驱动力大小的均值成正相关,与动摩擦系数、静摩擦系数呈负相关。从均值灵敏度系数的大小来看,对支座轴-套筒接触力失效概率影响最大的为轴-套筒间间隙。
(2)对于失效模式为摇臂到位时间时,机构失效概率与轴-套筒间间隙的均值、动摩擦系数的均值成正相关,与静摩擦系数、驱动力大小的均值成负相关。从均值灵敏度系数的大小来看,对摇臂到位时间失效概率影响最大的为轴-套筒间间隙。
5 结论
(1)在支座轴-套筒接触力失效和摇臂到位时间失效两种失效模式下,对失效概率及可靠度影响最大的因素均为轴-套筒间间隙大小,且均与间隙大小的均值成正比。
(2)驱动力大小也会对失效概率及可靠度产生影响,但总体上影响较小。
(3)综合计算得到两种失效模式下机构的综合可靠度为0.998831,可靠性较高。
(4)在可控范围内,在机构的设计过程和加工、制造过程中要重点关注轴与套筒配合问题,将间隙大小控制在合理范围内。
