一种土仓可视化伸缩摄像头控制的国产化方案研究
2022-04-14陈新兵
陈新兵
(中国铁建重工集团股份有限公司 湖南长沙 410100)
我国已是世界上隧道及地下工程规模最大、数量最多、地质条件和结构形式最复杂、修建技术发展速度最快的国家[1]。盾构作为机械化开挖的工程装备,已经在我国隧道及地下空间开发中得到了广泛应用[2]。盾构开挖仓伸缩摄像头能够保证盾构法开挖对于前方地质情况准确判断,大幅提升开挖工作的安全性,目前已经在越来越多盾构机上得到应用。伸缩摄像头是一种适用于盾构开挖仓环境的专业可视化设备,当盾构掘进异常时,利用伸缩油缸将摄像头伸进土仓,观察掘进掌子面及刀盘实时情况,判断是否存在结泥饼等异常状态。盘体结构泥饼、土仓中心泥饼、盘面泥饼使刀具失去切削作用,盾构推力虽大但刀盘不能贯入,影响掘进效率[3]。采用土仓可视化系统,可在主控室内清晰观察土仓内的中心结泥饼情况,为盾构检修、掘进参数调整等提供可视化依据,方便了调试和操作人员监测、管理并完成掘进状态诊断[4]。
1 伸缩摄像头控制的原理概述
伸缩摄像头具备机器视觉功能,依赖搭载的伸缩电缸将摄像头送入土仓环境实现。伸缩摄像头电缸包括伸缩电缸和驱动其旋转的回转机构,其整机外形如图1所示。
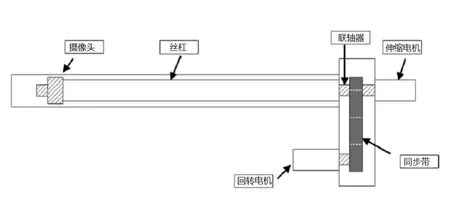
图1 整机外形图
伸缩电缸的伸缩由伺服电机驱动丝杠螺母实现,头部搭载有摄像头,行程为2000mm;回转驱动主要用于带动摄像头绕轴线旋转,回转由伺服电机驱动同步带,带动电缸整体作±180°旋转,旋转速度0~5r/min。伸缩、回转电缆通过拖链实现。
由于土仓空间有限,为了精确控制可视化角度和防止摄像头等设备损坏,机构的伸缩行程和回转角度必须严格保证,通常行程控制精度要求±0.2mm,回转角度精度要求±0.1°。由于常规的电机控制精度在±0.5mm 以上,无法满足此机构控制要求,此方案采用伺服控制。同时,由于盾体空间狭小,对驱动器的尺寸有严苛要求,需要使用紧凑型控制单元。目前,市场上可选的、具有成熟应用市场的伺服控制器还是依赖进口,以西门子V90 系统为代表的伺服驱动器占据大部分市场。
随着我国重工设备自主知识产权化、核心技术国产化的要求不断提升,进口品牌控制器还存在购入成本高、技术资料复杂、应用门槛高等不足,且目前受国际芯片危机影响,进口设备普遍货期增长,其采购周期严重影响到项目执行效率。因此,研究国产化控制器替代方案有重大意义。在充分获取西门子V90的应用特性后,本文寻求可行的国产化替代方案,并研究其应用于盾构土仓伸缩摄像头控制的可靠性。
2 国产化实验
2.1 硬件配置
本方案盾构项目盾构开挖仓伸缩摄像头改造前的伺服驱动控制采用西门子V90,电机采用西门子1FL系列,配备20位+12位多圈绝对值编码器,在无硬件限位的情况下,最多能记录4096圈,否则计数溢出,而在溢出情况下断电,无法保存当前位置。在不改变机械结构的情况下,结合此项目,最大安全行程为1024mm,伸缩电缸的最大伸出距离受限。
此方案已有2年左右的应用时间,为了解决国外品牌价格高、货期长的问题,拟用汇川伺服控制器作为进口品牌西门子V90 的替代产品,电机也同步更换为汇川MS1系列,配置参数对比如表1所示。

表1 配置对比
所选汇川伺服控制器型号可灵活选用单相/三相电源供电,支持高速百M 级Profinet 总线通信,并支持丰富的报文应用,包括伺服控制标准报文1、标准报文3、西门子标准报文102、西门子标准报文111、西门子标准报文105、西门子标准报文750、西门子标准报文850 报文等各类标准报文,软件可无缝应用之前的伸缩摄像头程序,极大地减少了国产化过程中编程的工作量。经过调研,汇川伺服控制在软硬件上都可完全替代进口品牌。另外,此控制器可支持配置23位电子多圈绝对值编码器,配备编码器电池,开挖仓伸缩摄像头应用中不存在计数溢出问题,并且在尺寸上,该产品较进口品牌伺服控制体积更小,在寸土寸金的盾构机盾体土仓更具优势。方案整体硬件配置如图2所示,使用“一网到底”模式[5],由同一个Profinet 网络连接PLC、HMI、控制器,使用的硬件如下。

图2 硬件配置
(1)PLC:CPU 1516-3 PN/DP;订货号:6ES7 516-3AN01-0AB0;HMI:西门子精简系列面板KTP1200 Basic PN立式。
(2)控制器:IS620FS5R5I。
(3)电机:MSH1-75B30CB-A331Z(绝对值编码器)。
2.2 软件配置
项目使用西门子TIA Portal V15平台[6]编程,项目中需要安装IS620F PN 的对应GSD 文件,在网络视图中添加IS620F 设备并创建与PLC 的网络连接,添加后的项目网络视图如图3所示。

图3 网络配置
S7-1500 可以通过PROFINET 通信连接IS620F 伺服驱动器,使用EPOS(基本位置控制)模式,对驱动进行控制,该模式位置规划是在伺服内,只需要使用FB284 功能块把相关的目标速度、目标位置和加速度等信息送到伺服内,伺服实现位置规划和速度规划。
EPOS 基本定位控制需要对在驱动设备视图内组态西门子标准111 报文,并在程序中调用FB284 程序块,FB284块的管脚HWIDSTW及HWIDSZW需要设置为111报文的硬件标识符(见图4)。

图4 报文配置和硬件标识符组态
2.3 后台软件对比
西门子V90 采用SINAMICS V-ASSISTANT(见图5a),V-ASSIATANT调试软件基本功能有选择驱动、选择报文、配置网络、设置参数、监控状态及测试电机和优化驱动,参数设置采用可视化向导,后台软件和设备通信可选择USB和Ethernet连接。
汇川SI620F 采用InoDriverShop,详见图5(b),具有选择驱动、选择报文、配置网络、设置参数、监控状态及测试电机和优化驱动等基本功能,软件具有可视化安装向导,后台软件采用伺服驱动器RS232 通信用电缆,方便单机调试。可见在后台软件上,汇川和进口品牌一样直观简洁,操作简单。
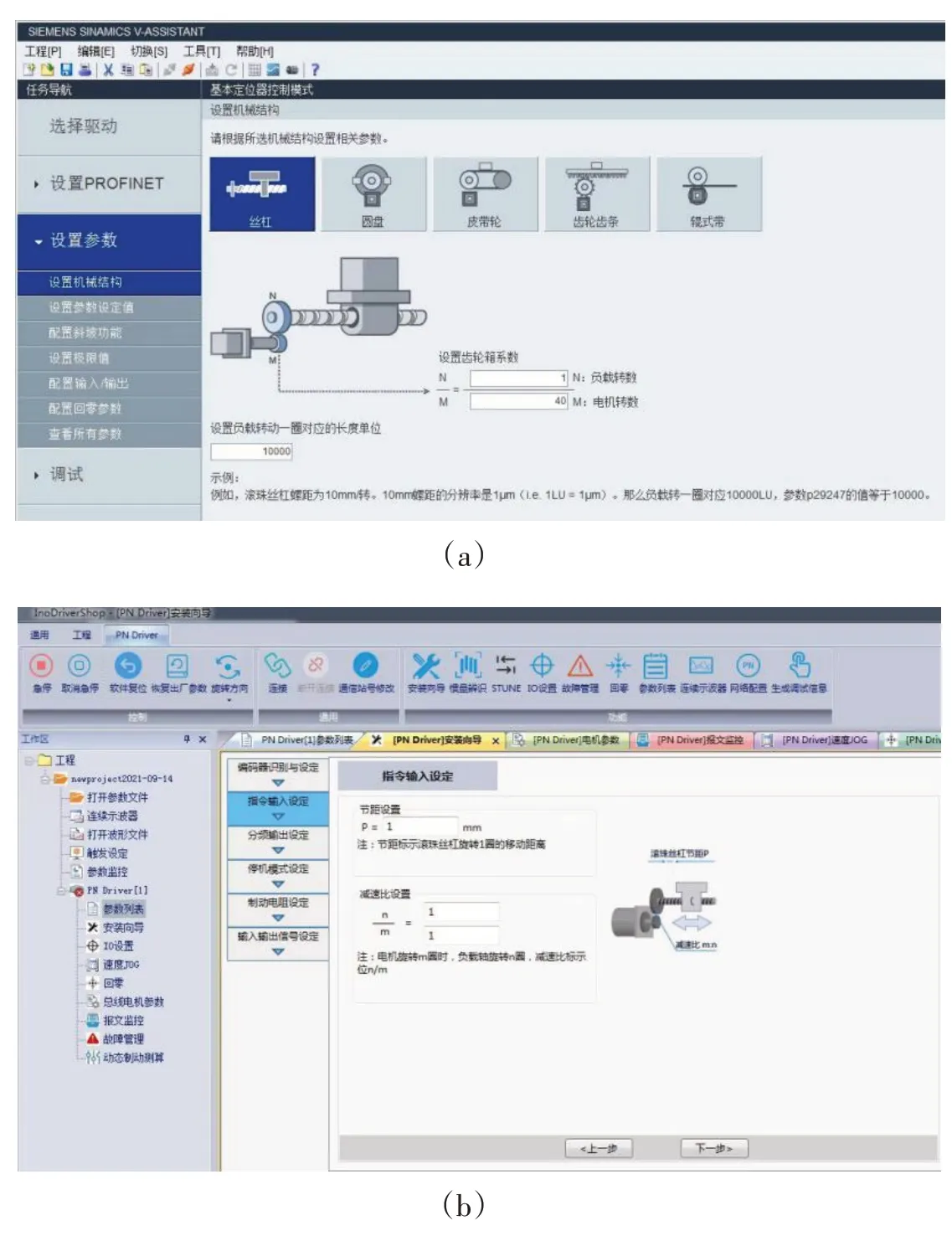
图5 界面比较
2.4 性能测试
完成程序组态和编译后,对此系统进行加减速响应和位置控制精度测试,测试方法如下。
使用汇川后台软件InoDriverShop,对电子齿轮比、加减速时间进行如下设置并下载:
电子齿数比1(分子)H0507=8 388 608
电子齿数比1(分母)H0509=10 000
Epos最大加速度值H1302=2
Epos最大减速度值H1304=5
程序中先赋值Position 为-100000,在运动过程中更新Position为100000,考察加减速过程的响应速度及动态控制精度。
ExecuteMode的上升沿触发定位运动,电机开始加速,理论加速时间为5s,实测5s。
更新position 设置后,电机先减速,理论减速时间2s减到速度为0,接着电机反向加速5s,到达设定速度运行,再减速2s,最终位置停在100000,运行曲线如图6所示。
从图6可见测试结果机构动作响应迅速,无论是加速时间还是减速时间,都和设定参数保持一致,并且位置显示与实际测得的距离偏差在预先设计范围以内,符合控制要求。

图6 运行曲线
通过以上性能测试,验证了汇川IS620F 的控制响应特性和实际控制精度,证明此产品理论上可以实现伸缩摄像头的运动控制。
实际项目中,电子齿轮比需要按实际机械设计参数配置,并按设计要求配置好加减速时间及运行速度。
现场根据使用需求,重复给定不同伸缩位置及旋转角度,并分别记录显示和实测数据实,并和西门子V90测试参数对比,对比结果如表2、表3、表4所示。

表2 伸缩精度对比

表3 回转角度精度对比

表4 测试结果对比
上述表格表明,国产伺服驱动与西门子伺服驱动的伸缩精度相同,回转角度精度相同,皆满足伸缩摄像头的设计要求精度,并且国产伺服驱动伸缩摄像头由于配置23位电子式多圈绝对值编码器,实际安全伸出最大长度比西门子伺服驱动配置的12 位多圈绝对值编码器的伸缩摄像头电缸伸出最大长度长。
3 结语
本文从尺寸、硬件配置、软件设计、性能比较、后台软件及实际测量数据对比等多方面对进口品牌西门子V90 和国产品牌汇川IS620F 进行了全方位的对比,可确认汇川SI620F能够完成西门子V90的替代。由此可见,本文实现了国产化方案的应用验证,完成了对国外伺服系统的替代。
