仿生柔性鳍波动推进水动力性能试验
2022-04-06王崇磊
王崇磊, 刘 洋, 韩 阳
(哈尔滨工程大学船舶工程学院船舶与海洋工程国家级实验教学示范中心,哈尔滨 150001)
0 引 言
作为水下机器人技术之一,仿生柔性鳍波动推进技术[1-6]以用MPF模式[7]推进的典型鱼类为仿生对象,模拟鱼类的游动方式[8],具有操纵性优异、水动力噪声低、易于仿生改造、地形通过性强、可在限制航道工作等海洋作业特点,在海洋资源开发、浅滩地形地貌采集、极地附属探测等多领域发挥作用。
目前,国内外已有不少大学和研究单位进行了各式各样的仿生波动推进的研究[9-14],但是在计算方法以及控制机构、机械结构、仿生推进部分[15-17]的设计方面依然存在着一些需要解决的问题,离实际工程应用还有很大距离。据此,本文从一些机理性和探索性方向进行研究,设计及搭建了仿生波动鳍流场分析和力学分析试验平台,并进行PIV流场测试及力学测试,为更为深入的性能研究提供理论层面上的指引和技术层面上的帮助。
1 机构设计
1.1 运动机构设计
实验中采用舵机-摆杆-波动鳍的传动方式,如图1所示。舵机采用数字舵机,基本参数见表1。根据设置,摆动中心到波动鳍内侧边缘的距离和波动鳍宽度的比例为1∶2,可通过调节波动鳍夹片与摆杆之间的位置关系或者波动鳍夹片和仿生波动鳍之间固定的位置关系,调节舵机的摆动中心到波动鳍内侧边缘的距离。

?

表1 舵机参数一览表
1.2 波动鳍材料和形状选择
由于单个周期波动鳍相比较多个周期在相同摆幅、频率条件下,具有更大的推力和更高的推进效率,因此选用单个周期波动鳍的推力测量作为试验的主要内容。材料上选择硅胶板,满足密度小、延展性高、表面光滑疏水的要求;波动鳍的设计宽度为100 mm;鳍面波动方式近似为正弦,结合波动鳍的摆幅参数a的取值有-0.30,-0.40,-0.50,如图2所示,b取值为0.5,对应于波动鳍的形状有3种,如表2所示。

表2 波动鳍和展开扇形的参数对照

图2 不同摆动幅值的鳍面模型
1.3 测力方式设计
如图3所示,将舵机、传动机构、波动鳍作为一个整体,各舵机用不锈钢连接件固定在一根铝合金横梁上,连接成为一个整体。通过测力天平测得前后方向的推力,然后将天平水平旋转90°测得上下方向的升力。
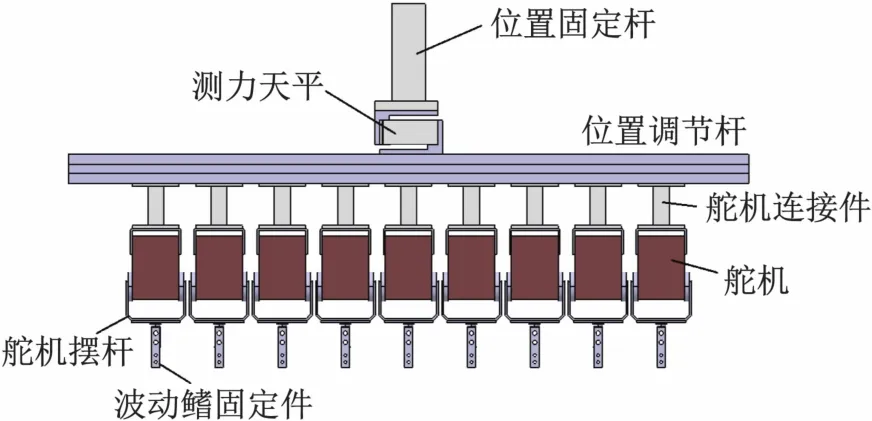
图3 试验机构三维模型设计
1.4 控制系统设计
控制系统采用24路舵机控制集成系统,包含C015-24路控制器(ZL-IS2)、USB数据传输线、24路舵机控制板、试验测试机构等。通过在软件控制面板上输入摆动角度所对应的脉冲来控制单个舵机的摆动速度和摆动角度。脉冲幅度和摆动角度的关系如表3和图4所示。

图4 相对应的仿生波动鳍控制效果

表3 舵机脉冲数与设定摆幅的转换关系
对各舵机的摆动角度进行脉冲控制的同时需要控制波动的频率。根据已设定的0.25,0.50,0.75,1.00,1.25,1.50 Hz 6个波动频率,对所有舵机对应的运动时间数进行统一设置,如表4所示。
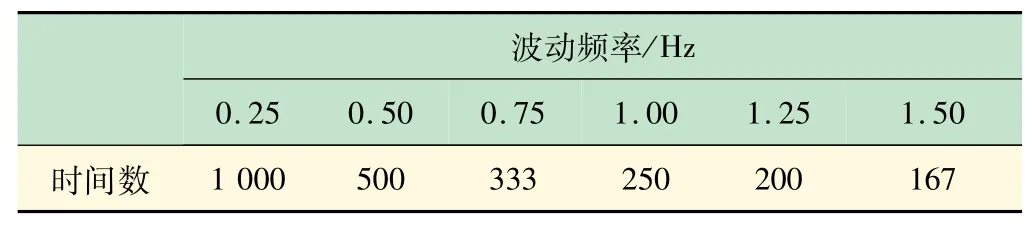
表4 舵机时间数与设定摆动频率的转换关系
2 试验场地选择与试验机构搭建
2.1 试验场地选择
在来流速度为0~0.3 m/s条件下,波动鳍在频率和摆幅均取较大时可产生正向推力,对室内循环水槽和拖曳水池进行低流速下速度准确性核对,如表5所示。实验测得拖曳水池在拖车带动下的流速准确性好于循环水槽,因此选择拖曳水池进行试验测试。

表5 流速测量结果对比 m·s-1
2.2 试验机构搭建
如图5所示,根据三维设计方案,选择一根长度为1 m的3060铝合金型材作为装载舵机的横梁。装配顺序依次为铝合金横梁-舵机连接件-舵机-摆杆-波动鳍夹片;波动鳍整体长度设定为500 mm,由9个舵机控制,端面预留20 mm,两个舵机中心之间的间距为60 mm;舵机摆动中心到波动鳍内侧边缘的距离为到波动鳍外侧边缘的距离的1/3,长度为50 mm,波动鳍的波动方式幅值随着波动的前进而逐渐变小,装配好的波动鳍运动装置波动鳍朝下,铝合金横梁在上,与测力传感器直接相连,传感器装在适航仪上,传感器下端连接波动鳍运动装置,上端连接适航仪升沉杆。

图5 试验装置构建
3 不同运动参数下仿生波动鳍力学特性试验分析
3.1 试验测量方案
将测力天平(HBM的S2M力传感器)连接到数据采集器(HBM QuantumX MX840B-16通道用放大器),再将数据采集器连接到电脑进行参数设定。测力试验共进行三类:①控制基本运动参数摆动幅值、摆动频率的变化;②控制摆动幅值和摆动波长的交互变化;③控制外界来流速度的变化。
3.2 试验结果及分析
(1)控制基本运动参数摆动幅值、摆动频率的变化。数据取来流速度v=0.0 m/s,波长λ=0.5 m,摆动幅值参数a=-0.50,摆动频率f取所有值(0.25,0.50,0.75,1.00,1.25,1.50 Hz),试验测量结果如图6所示。
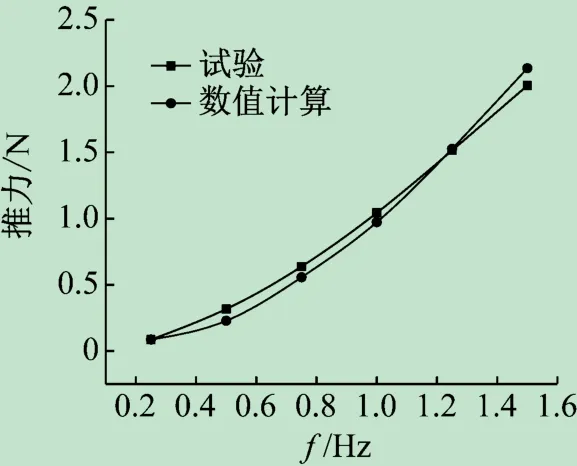
图6 摆动频率变化对仿生波动鳍推力的影响
由图6可知,随着摆动频率f的逐渐增加,仿生波动鳍推力的变化呈正相关,表明在其他运动影响参数不变的情况下,f的增大对仿生波动鳍的水动力性能起正向作用,且随着振幅的增加,仿生波动鳍的推力稳定上升。
数据取来流速度v=0.0 m/s,波长λ=0.5 m,频率f=1.00 Hz,摆动幅值参数a取所有值(-0.25,-0.30,-0.40,-0.50)。试验测量结果如图7所示。
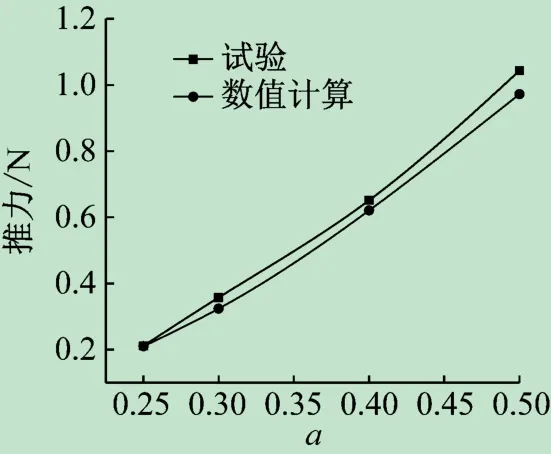
图7 摆动幅值变化对仿生波动鳍推力的影响
由图7可知,在来流速度v=0.0 m/s,波长λ=0.5 m的情况下,随着摆动幅值参数a的逐渐增加,仿生波动鳍推力的变化呈正相关,表明在其他运动影响参数不变的情况下,摆动幅值的增大对仿生波动鳍的水动力性能起正向作用,仿生波动鳍的推力稳定上升。
(2)控制摆动幅值和摆动波长的交叉影响。数据取来流速度v=0.0 m/s,摆动频率f=1.00 Hz,摆动幅值参数a=-0.40,波长λ=0.5 m的波动鳍面,试验测量结果如图8所示。

图8 摆动波长和摆动幅值的交叉影响
由图8可知,对于已经设计好的同一种仿生波动鳍,当波长增加时,即同一个仿生波动鳍上波数减小时,波动幅值也会增加,这时的推力呈现逐渐增加的趋势。
(3)控制外界来流速度的变化。来流速度v取0.0,0.1,0.2,0.3 m/s,摆动幅值参数a=-0.4,摆动频率f=1.00 Hz,对于推力的描述以平均值来表示,结果如图9所示。

图9 来流速度对仿生波动鳍推力的影响
由图9可知,随着来流速度v的逐渐增加,仿生波动鳍推力的变化呈负相关。来流速度的增大对仿生波动鳍的水动力性能起反向作用,且随着流速的增加,仿生波动鳍的推力快速下降。
(4)观察到的涡现象。由图10可知,由于仿生波动鳍内侧边沿也是波动运动的,所以会产生与外侧数值计算结果相似的涡旋,这个涡旋随着波动动作的完成而在仿生波动鳍尾部脱离,最终会在水面上显示然后逐渐消失。

图10 波动尾部的水面涡旋
4 结 论
本实验研究了仿生柔性鳍自身属性摆动幅值、摆动频率以及外界来流速度对其自身推力产生的影响。试验结果表明,在保持其他运动参数和外界影响参数不变的情况下:
(1)摆动幅值变大或者摆动频率变大,仿生柔性鳍的推力变化表现为单调增加,且摆动幅值的影响更大于摆动频率的影响。
(2)随着来流速度的增加,仿生柔性鳍在1个周期下推力的平均值显著降低,分析表明,推力的平方的变化与来流速度的变化呈反比关系。
(3)对于已经设计好的同一种仿生柔性鳍,当波长增加时,即同一个仿生波动鳍上波数减小时,波动幅值也会增加,这时的推力呈现逐渐增加的趋势。
