断阶对超高速气动增升船水气动力特性影响的数值研究
2022-03-16纪世君倪其军
纪世君 倪其军 蒋 一
(中国船舶科学研究中心 无锡214082)
0 引 言
超高速气动增升船能够利用地效原理提供气动升力,支撑起船体的极大部分重量,降低船体的浸湿面积,大幅削减航行阻力,实现超高速航行。为了改善其水动力性能、降低高速航行过程中的阻力,参考高速滑行艇的构型特点在船底设置了横向断阶。一般而言,断阶可将船底分成若干个滑行面,提升每个滑行面的展弦比、提高滑行效率。
近年来对断阶动力特性的研究一直都是高速滑行艇水动性能研究中的热点问题,尹邦本和蒋一利用数值手段对二维断阶滑行艇模型的绕流场进行模拟,并针对不同攻角及断阶高度的模型进行对比计算;LOTFI等、MARCO 等和吴本坤等借助模型试验和不同数值研究的方法对断阶滑行艇的静水绕流场进行数值模拟,数值方法与试验结果对应良好,单断阶结构最多能够取得约15%的减阻收益;章丽丽等对气动增升型滑行艇底部滑行面通气机理及其升力分布情况进行研究和分析;BRIZZOLARA等应用STAR-CCM软件对反曲断阶的减阻特性进行研究;黄淼等、陈枫、郑小龙等对水陆两栖飞机滑行阶段开展试验研究,分析断阶对船体水动力性能的影响,并对断阶形式进行优化,最终在滑行阶段取得了14.8%的减阻收益。
本文中利用数值手段对断阶在超高速气动增升船这一特殊船型上应用的合理性进行了检验,并分析断阶在气动增升作用下的减阻效果,探究断阶对阻力、航态、浸湿面积和气动增升率等水气动力特性的影响,为该船型的工程设计提供了较好的技术支撑。
1 超高速气动增升船及数值计算方法
1.1 模型简介
超高速气动增升船的气动升力翼采用鸭式布局翼。前翼是小展弦比的升力翼,后翼是带端板的主升力翼。主要的水动力结构为单船身滑行面,艇底设置一个横向的断阶。其几何模型见图1,主要尺度参数见表1。
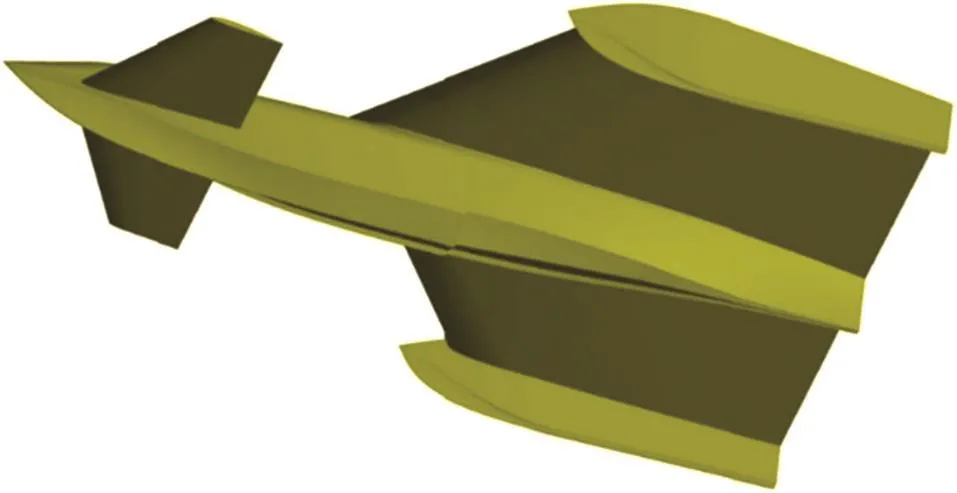
图1 超高速气动增升船总体外形示意图
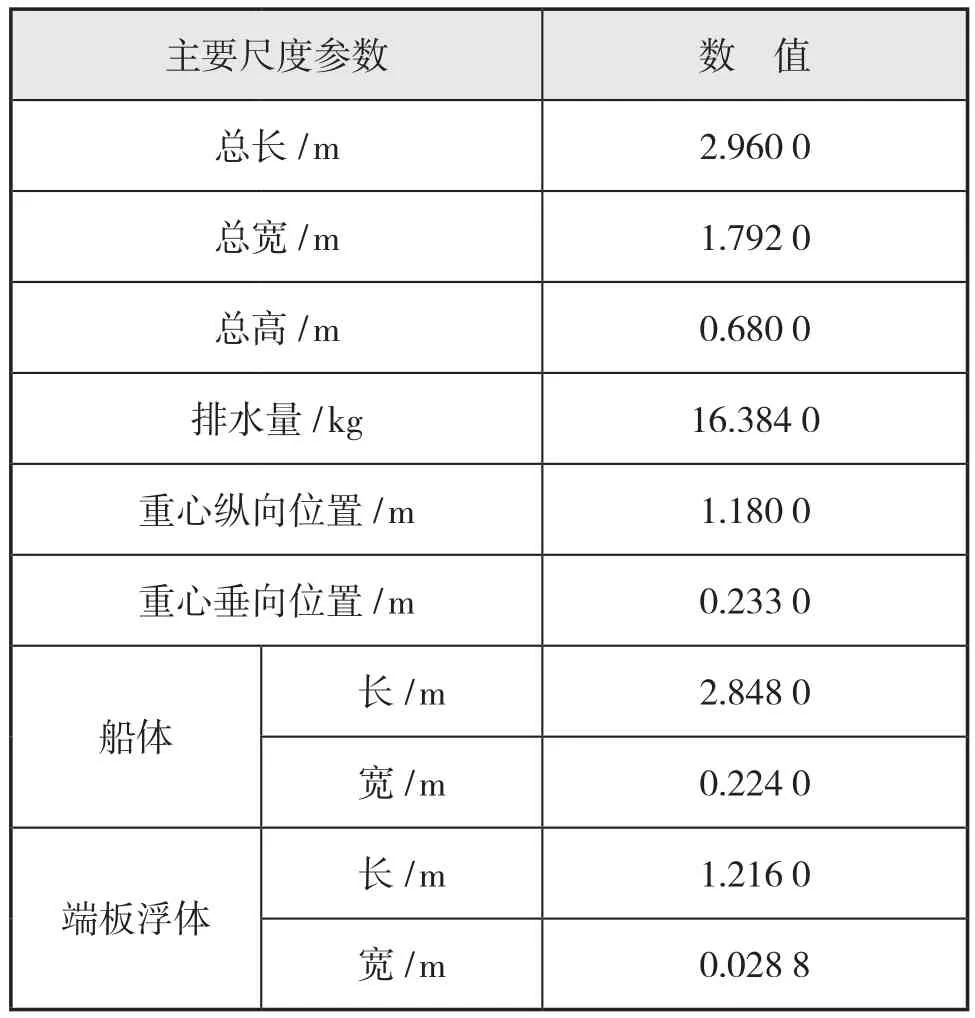
表1 超高速气动增升船模型的主要尺度参数
1.2 研究方法
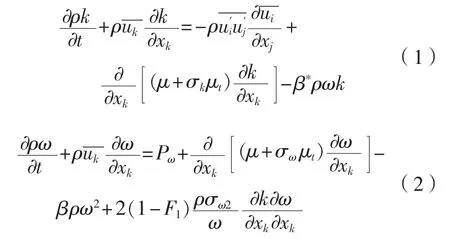
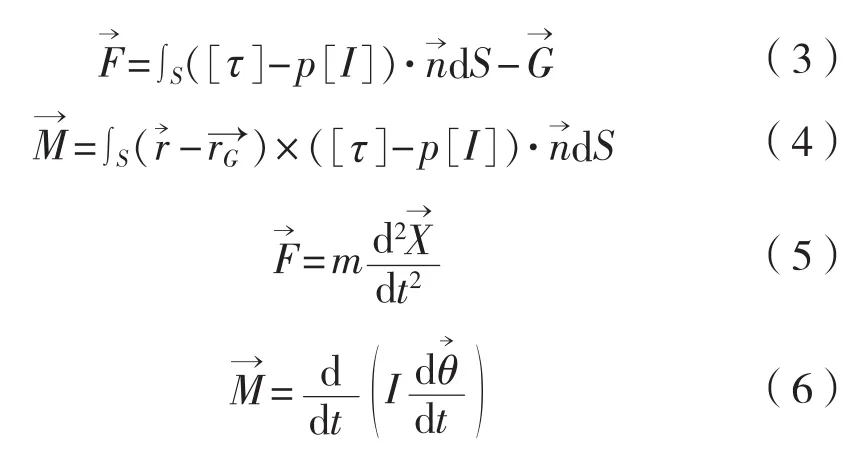
本文采用基于雷诺平均N-S方程(RANS)方法的涡粘性湍流模型SST-模型(如下式)作为流体控制方程进行求解。该模型对自由剪切流动以及附着边界层湍流具有较高的数值计算精度。这对于高速艇长尾流以及艇体附近流场情况的模拟具有较大优势。由于研究超高速气动增升船的航行特性需要兼顾在航行过程中的水气两相特性,进一步引入VOF方法对模型加以修改实现运动界面进行捕捉,以更好区分二相流体并捕捉两者的绕流特征。
在上述数值模型的基础上,采用六自由度运动求解器结合重叠网格技术对超高速气动增升船的航行姿态进行计算,实际的求解流程如图2所示。
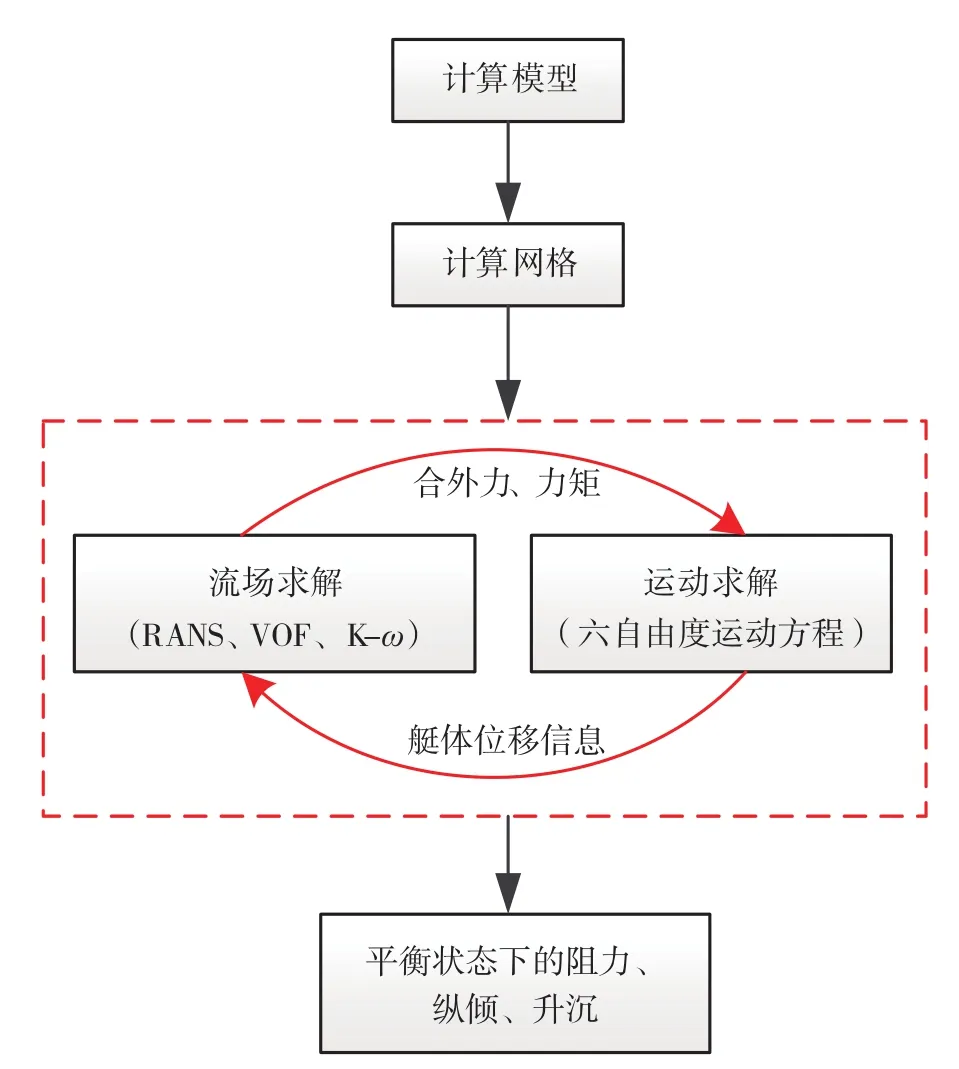
图2 流场及运动求解的实现过程

在求解过程中,根据每次迭代计算的结果,艇体表面及计算域内的网格节点移动至新的位置,即可实现艇体的运动模拟,而进一步的流场求解则在新的网格上进行。不断迭代至收敛后,对应的艇体姿态即为航行中的平衡姿态。
按照重叠网格方法,将计算域分为包裹船体的重叠网格区域以及填充计算域的背景网格区域。背景网格采用切分网格技术进行划分,并对自由液面附近网格进行区域加密,所形成的网格为正交的六面体。重叠网格区尺度(长×宽×高)为1.5×0.45×0.4,网格运动形式为随动,相对船体静止。在重叠网格区域采用蜂窝状网格,并在船体底部滑行面、端板浮舟和升力翼等关键部分进行网格加密,以对船体表面复杂的几何外形进行捕捉。船体表面网格运动形式为刚体六自由度运动。得到的计算域总体尺寸和各边界条件如图3所示。
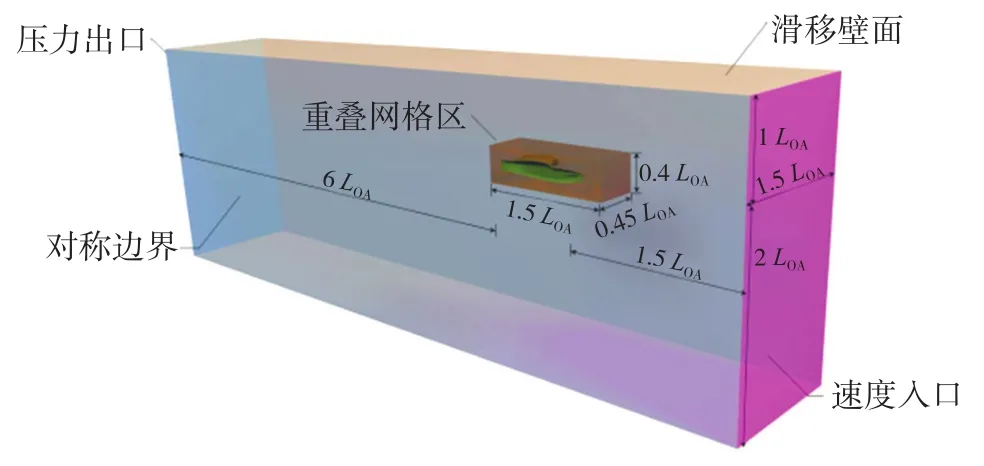
图3 计算域尺寸和边界条件定义
按上述方法划分后得到的总网格数量为6.86×10,最终生成的船体表面网格见图4,计算过程中用到的网格总体划分情况见下页图5。

图4 船体表面网格
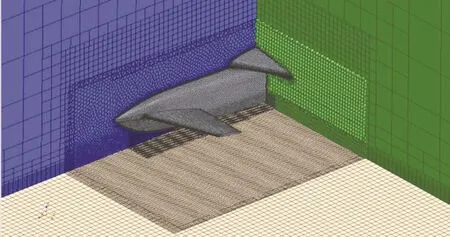
图5 网格总体划分形式
2 计算结果及分析
2.1 模型试验简介
本文中所探讨的超高速气动增升船已在中国船舶科学研究中心开展拖曳试验,试验模型与数值计算模型尺度相同,采用高强度复合材料进行加工,表面光洁,可满足水池拖曳试验要求。试验过程中模型通过四自由度适航仪来拖带实现静水直航运动,并对拖曳力和模型的运动姿态进行检测,试验中还对模型两侧的兴波特性进行记录,所使用的主要仪器及量程见表2。
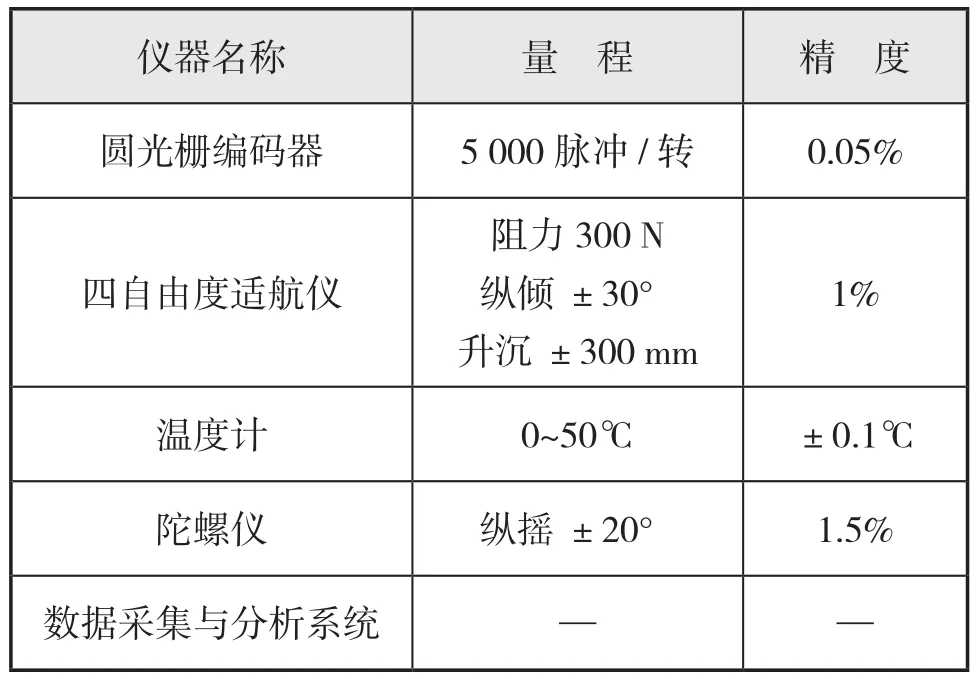
表2 超高速气动增升船模型试验仪器及量程
2.2 数值有效性检验
在此基础上,将3~11.1 m/s范围内共计11个航速点(依据傅汝德数相似准则,其对应的实船航速为32~120 kn)进行直线拖航运动工况的模拟,并将得到的结果与试验结果进行对比,以进一步验证数值方法的有效性。
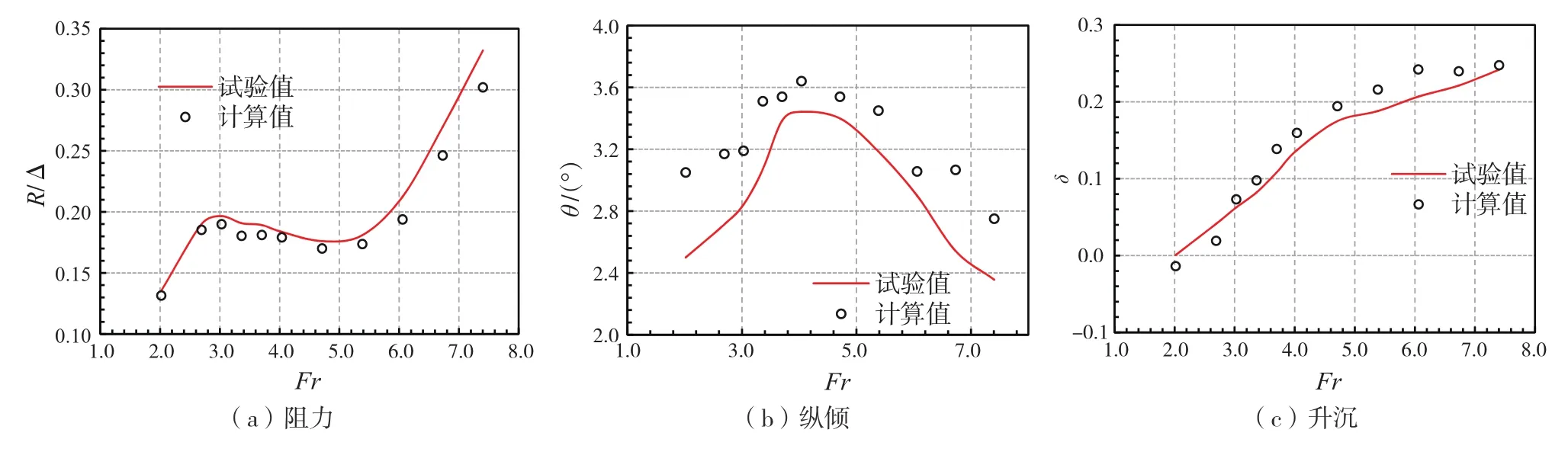
图6 计算值与试验值的对比
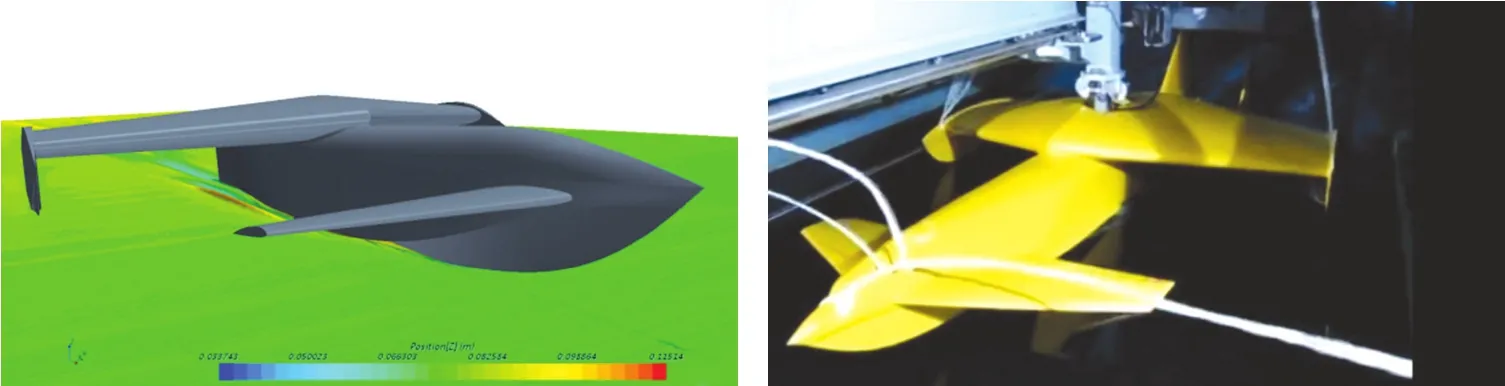
图7 试验兴波与数值计算结果的对比
可见,在计算的航速范围内,数值模拟得到的航行兴波、尾迹以及阻力、纵倾等均与试验现象较为符合;阻力的计算误差随着航速提升出现增大趋势,最大误差为巡航速度下(= 7.40)的计算结果,约为9.09%。而在航行姿态上,计算纵倾和计算升沉较试验值均略有增大,纵倾的平均误差约为0.33,升沉的平均误差为0.014,其中在低速及高度段纵倾的计算误差略微偏大。这主要是因为低速过渡航态下,首部兴波明显并伴随着波浪的破碎、翻卷;而在高航速下,首部则会产生较强喷溅,数值计算尚不能较好地捕捉此类强非线性的流动现象,进而导致艇体的平衡状态与试验结果出现较明显偏离,但计算姿态在总体上仍能反映出艇体姿态与航速的变化趋势,满足探究需要。
综上所述,采用该数值模拟方法得到的计算值同试验结果吻合良好,能够较好地模拟出超高速气动增升船航行过程中的水、气流场特点,可用于超高速气动增升船绕流场特征的分析。
2.3 超高速气动增升船水气动力特性分析
对超高速气动增升船静水直航试验结果进行分析,可以发现超高速气动增升船的阻力变化趋势与高速滑行艇类似,都存在一个阻力峰。在进入超高速航行状态后,阻力曲线迅速爬升,但阻升比最大也只约0.30,比常规高速艇仍有不错的优势。另外,在整个航行过程中,艇体的纵倾在每个航速点均能维持稳定航行,在超高航速下有效抑制了海豚运动的发生,在航行稳定性上也表现出优良性能。
图8展示了超高速气动增升船在巡航速度时的绕流特征及压力分布,图9则展示了巡航速度下的艇底浸湿以及艇体兴波状态。根据图示状态,由于升力翼在地效区内的增升作用,气流在经过前翼后形成一条低速带并延伸至主升力翼之下。受到低速气团的影响,主翼下表面产生明显的高压区域,从而有效提高气动升力。对于水流场,在流经断阶后,流动出现分离并形成明显的断阶后负压区。在高航速下,艇体在气动升力的作用下已大部分抬离水面,主艇体周围的空气在低压作用下被吸入断阶后的负压区,形成断阶后空穴。在上述升力翼与断阶的联合作用下,艇底浸湿主要集中在断阶前的滑行面上,断阶之后几乎处于无浸湿状态,从而有效降低高航速时的摩擦阻力,有利于实现超高速航行。
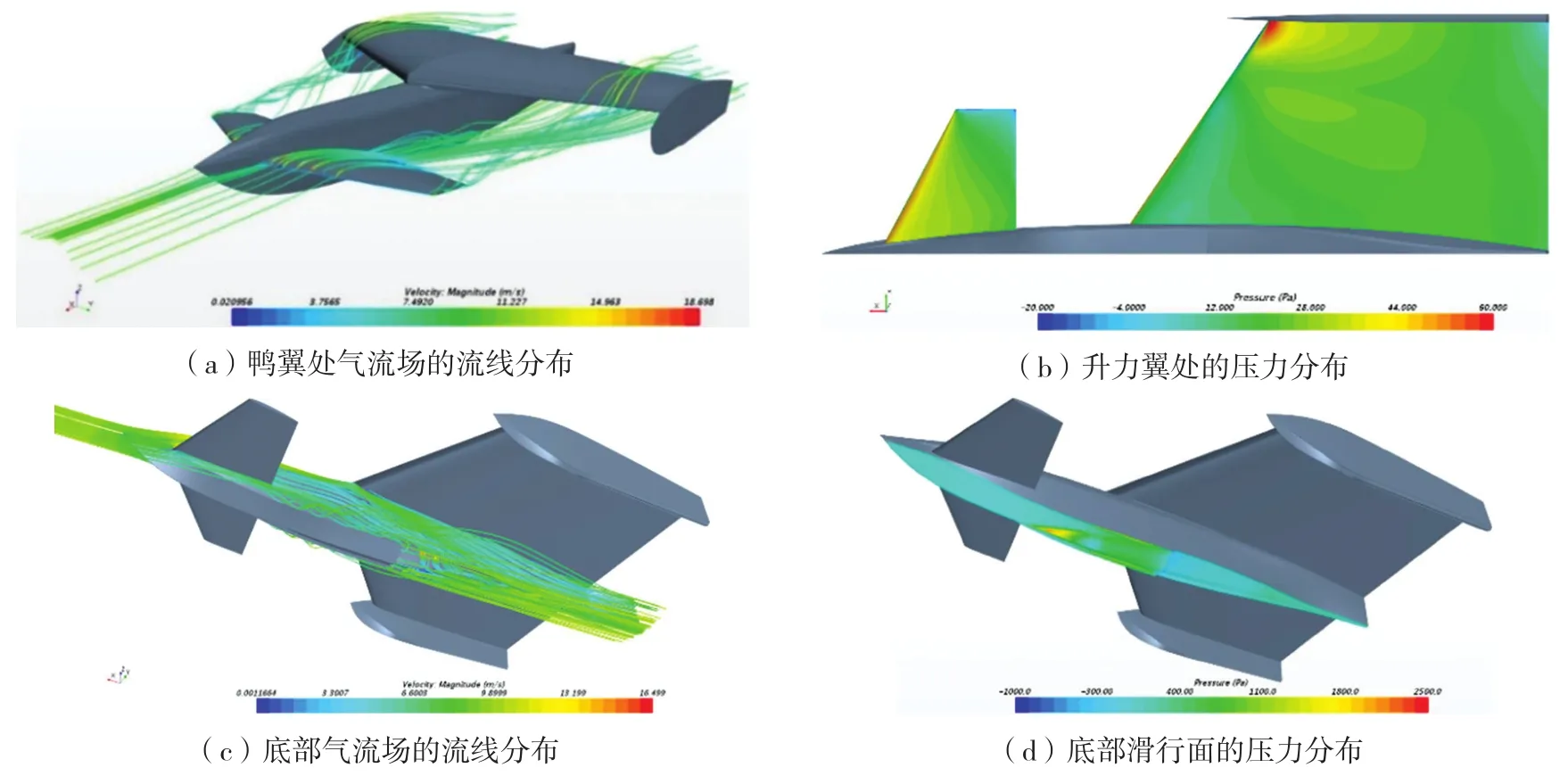
图8 巡航速度时的绕流特征及压力分布示意图

图9 巡航速度时的试验兴波与艇底浸湿
2.4 断阶对超高速气动增升船水动力性能的影响
为了进一步探究断阶对超高速气动增升船水气动力性能的影响及其减阻机理,开展对比虚拟试验,对断阶作用下的气动绕流特性进行研究。试验中引入一个具有相同尺度特征的无断阶模型作为参照对象,如图10所示。为最大限度减小其他尺度参数对计算结果的影响,两模型的尾缘点高度相同,即无断阶模型舯后的龙骨线逐渐抬升以保持与原模型浸湿的水下排水体积一致。
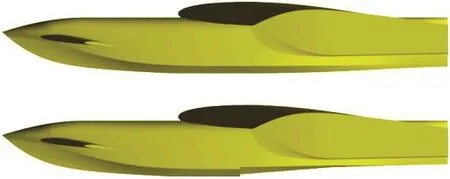
图10 有、无断阶模型的对比
两模型的计算阻力以及航姿的对比如图11所示。为便于讨论,两模型分别命名为M-OR(原模型)和M-NS(无断阶模型)。可以看出,增设断阶后,高航速下的阻力性能得到明显改善,两者的曲线近似相交于= 3.2的工况下。这一结论与细长型断阶滑行艇的试验结果极为符合。此后,随着航速的提升,断阶的减阻效果也趋于明显,在巡航速度下的减阻效果为26.2%,最大减阻效果为33.7%,出现在为6.06的航速下,较普通的细长型断阶滑行艇的性能提升更为显著。在航行姿态上,当>4.04时,设置断阶使船体纵倾更加明显,在巡航速度下断阶模型较之无断阶模型的纵倾增大1.25。
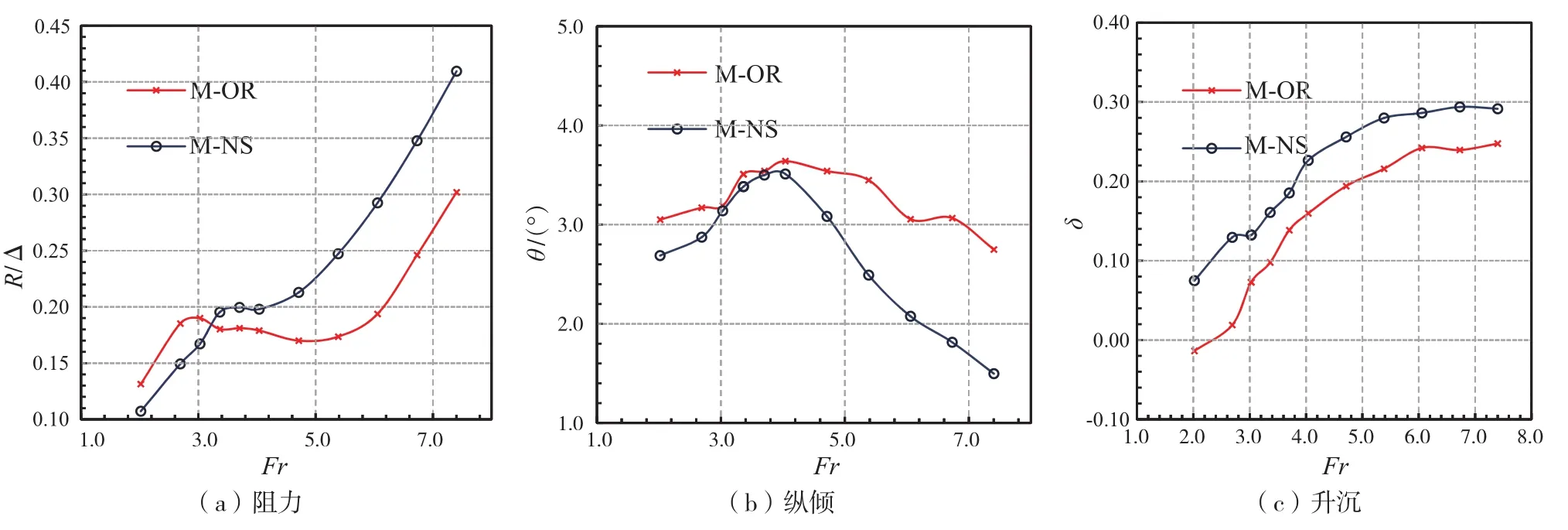
图11 有无断阶模型在阻力及航姿上的差异
下页图12中,以中纵剖面处水气两相分布的形式给出断阶后空气穴形态随航速的演变。由图可见,在较低的航速下,船体吃水较深,来流在断阶处仅能以泄涡的形式同船体分离。这对低速阻力很不利,因此在较低航速下,断阶模型的阻力性能不如无断阶模型。而随着航速提高,在水动升力的作用下,船体不断抬离出水面,断阶与舭部折边的交叉处开始与空气流场相通。在这种情况下,流动脱离所形成的负压区会将附近的空气吸入船底形成空穴(见下页图12)。
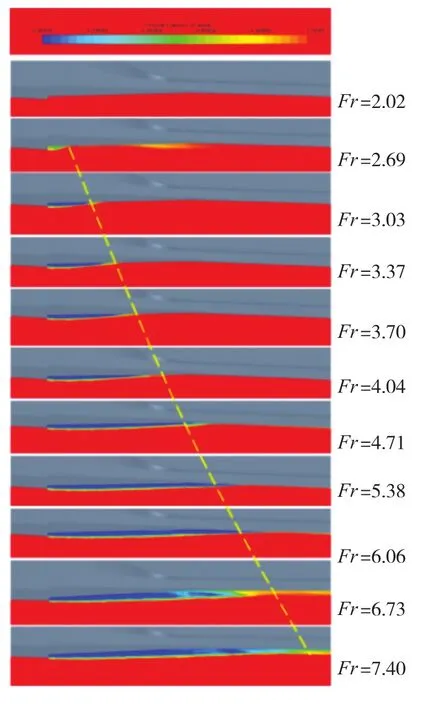
图12 断阶后空穴形态随航速的演变历程
在= 2.69时,空穴处于初生状态,仅有少量气团附着于断阶后端;随着航速进一步提升,在气动升力翼及水动压力的联合作用下,艇体(尤其是艇体尾部)的升沉进一步增大,来流在断阶处的脱离速度增大,空穴也随之向船尾方向延伸。在巡航速度下,发展充分的空穴几乎可覆盖整个断阶后的滑行面。
图13和图14分别展示有无断阶模型在船底兴波特性和浸湿特性的差异。

图13 系列航速下船体兴波特性的对比(图左/右分别为无/有断阶模型)
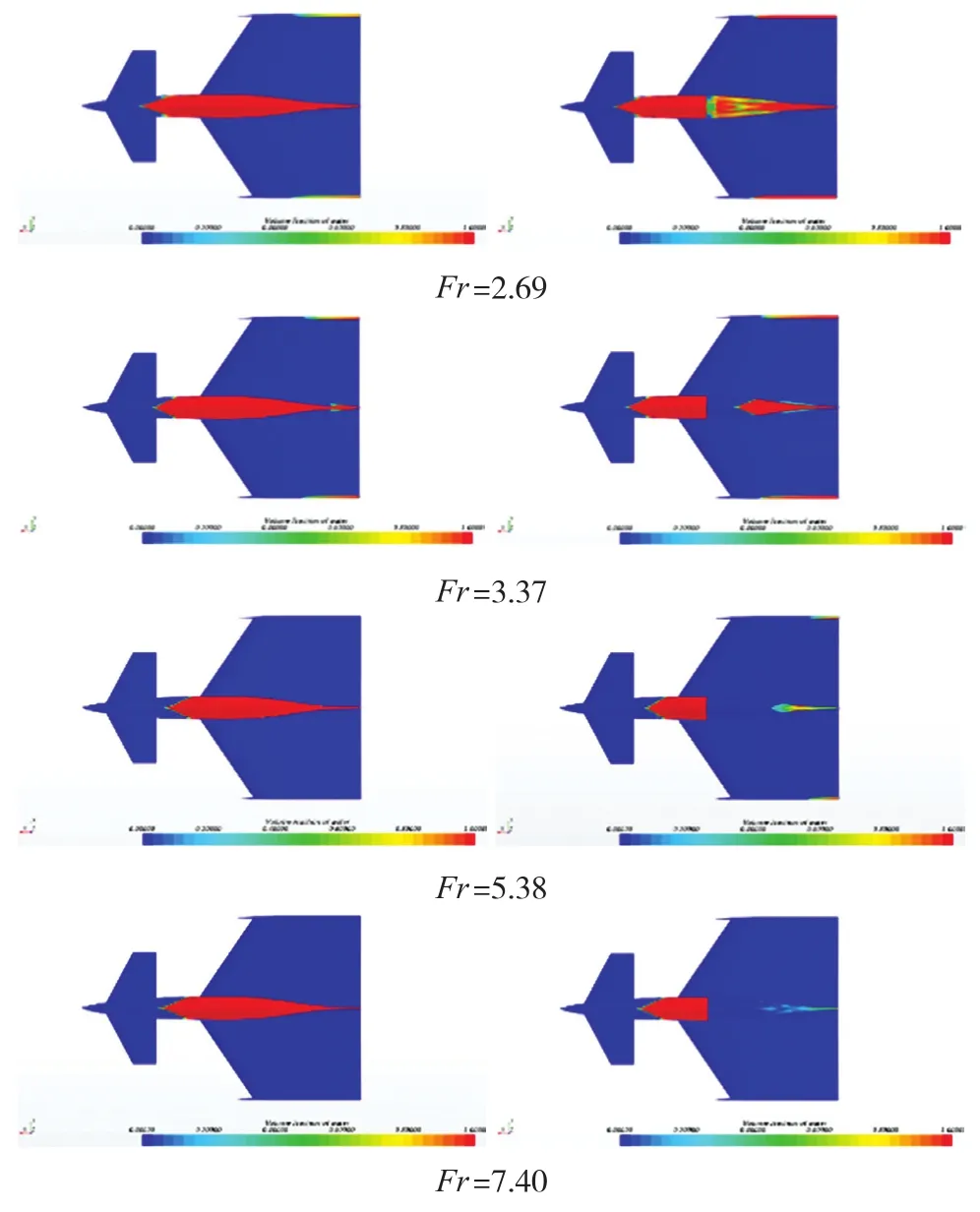
图14 系列航速下船体浸湿面的对比(图左/右分别为无/有断阶模型)
下页图15中给出了量化后的无因次化浸湿(A /B L,A为实测浸湿面积)。
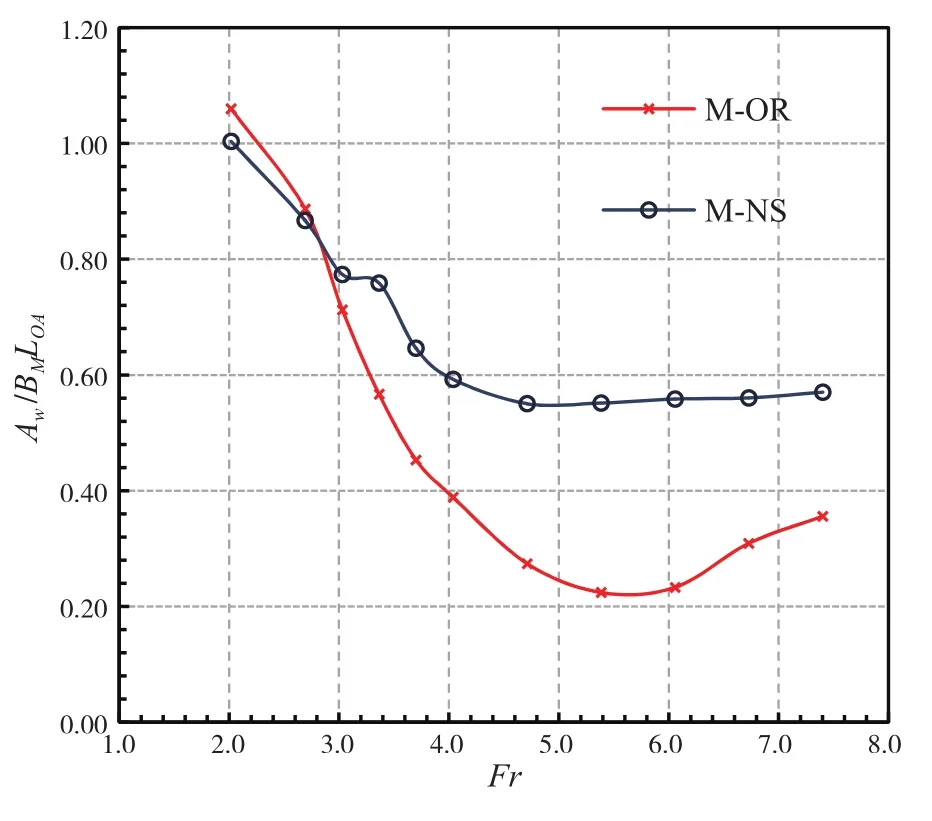
图15 有无断阶模型在船体浸湿特性上的差异
在<2.69的航速下,空穴处于初生状态时,两者在浸湿特性上的差异并不明显,无断阶模型的总体浸湿甚至要略小于断阶模型;当航速提升至= 3.37时,空穴的范围迅速扩大,断阶前的滑行面成为浸湿面积的主要来源。此时,断阶模型的总体浸湿面积开始小于无断阶模型,在阻力特性上也开始表现出相应的优势。在进入高速滑行状态之后,无断阶模型实际浸湿并无明显变化,而断阶模型断阶后空穴不断扩张,当=5.38时,仅有尾部少量滑行面浸没在水中。在巡航速度下,断阶之后几乎处于无浸湿状态,其总体浸湿基本上保持下降趋势。但受纵倾降低的影响,艏部滑行面的浸湿在>6.06的航速下有所增加。
2.5 断阶对超高速气动增升船气动力性能的影响
有无断阶模型在气动增升率上的差异对比见图16。可以看出,断阶对气动增升率的影响主要体现在>4.04的高速航速下。在此之前,两个模型几无区别。在巡航速度下,断阶模型的气动增升率约提升16.7%。
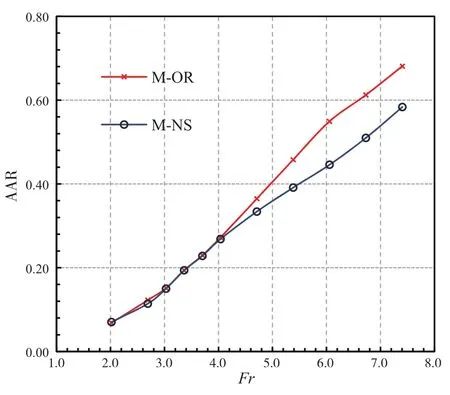
图16 有无断阶模型在气动增升率上的差异
此处需指出的是,在巡航速度下,断阶空穴的空气吸入量相比于主升力翼下空气总流量为小量,对总体的气动流场并不会产生明显影响,这一点可以从特定切面内的速度矢量分布上得以确认(如图17所示)。该剖面位于距尾缘0.35处,典型航速取巡航速度。可以看出,两者主要的气动绕流特性并无区别。因此,设置断阶并未对气动绕流场产生明显影响,而气动升力提升的主要原因是航行攻角增大。
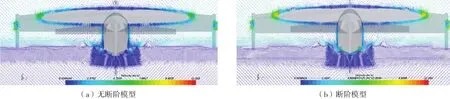
图17 有无断阶模型速度矢量切片对比
3 结 论
本文中利用STAR CCM+软件对超高速气动增升船水、气动力绕流特性进行初步研究和分析,并引入具有相同尺度特征的无断阶模型作为参照对象,进一步分析断阶对超高速气动增升船航行性能的影响,得出以下结论:
(1)在升力翼与断阶的联合作用下,超高速气动增升船的艇底浸湿主要集中在断阶前的滑行面上,断阶之后几乎处于无浸湿状态,有效降低高航速时的摩擦阻力,阻升比最大值约0.30。
(2)增设断阶后,高航速下的阻力性能获得明显改善,随着航速提升,断阶的减阻效果也趋于明显,最大减阻效果为33.7%,比普通滑行艇的性能提升更为显著。
(3)断阶之后的负压区将主船体附近的空穴吸入船底形成空穴。在>3.37的航速下,空穴随船体的抬升迅速扩张;在=5.38时,断阶之后几乎处于无浸湿状态,浸湿面积较无断阶模型大幅减小,有效改善了高速下的摩擦阻力。
(4)断阶通过改变水动压力分布增大了船体纵倾,对气动增升率的影响主要体现在>4.04的高速航速下,在巡航速度下,断阶模型的气动增升率约提升16.7%。