悬浮控制参数对磁浮车辆与道岔梁耦合振动的影响分析
2022-03-11杨志南冯洋刘东生赵春发
杨志南,冯洋,刘东生,赵春发*,
悬浮控制参数对磁浮车辆与道岔梁耦合振动的影响分析
杨志南1,冯洋2,刘东生2,赵春发*,2
(1.中铁第一勘察设计院集团有限公司,陕西 西安 710043;2.西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
建立了包含PID悬浮控制系统的两节编组磁浮列车动力学模型和细致的道岔梁有限元模型,仿真分析了不同悬浮控制参数条件下磁浮列车以30 km/h通过道岔梁时的动力学响应。仿真结果表明,间隙反馈系数取值偏小时,电磁铁悬浮间隙的波动幅值较大,不利于行车安全;增大间隙反馈系数,电磁悬浮系统的特征频率逐渐接近道岔梁的一阶垂弯模态频率,导致车岔耦合振动更强烈。间隙速度反馈系数取值较小时,电磁悬浮系统的阻尼偏小,车体振动加速度较大;间隙速度反馈系数取值偏大时,微分环节超前调节作用过强,车岔耦合振动剧烈。为缓解磁浮车辆与道岔梁的耦合振动,建议间隙反馈系数在7000~8000之间选取,速度反馈系数在45~60之间选取。
磁浮列车;道岔;反馈控制;耦合振动;数值仿真
常导电磁悬浮型(EMS,Electromagnetic Suspension)磁浮列车采用电磁吸力支承和导向车辆,以直线感应电机驱动列车前进,具有振动小、噪声低、乘坐舒适及爬坡能力强等优点,近年来在国内外得到快速发展与应用。目前,我国已开通运营上海高速磁浮线、长沙磁浮快线和北京地铁S1磁浮线,还有正在建设的清远磁浮旅游线和凤凰磁浮旅游线。EMS磁浮交通的技术优势在上述工程应用中已得到证实,但同时也有一些工程问题没有得到很好的解决。例如,国内外EMS磁浮列车研发和试运营期间,都曾出现过车辆与钢梁强烈耦合振动的问题[1-9],严重时甚至导致悬浮失稳,出现电磁铁砸轨现象。
为减缓磁浮车辆与钢梁的耦合振动,工程上采用了提高钢梁刚度及结构阻尼或安装外部吸能装置等措施,如上海高速磁浮线对维修基地钢框架梁进行加固[3],在钢道岔梁上加装调谐质量减振器(TMD,Tuned Mass Damper)[4]。长沙磁浮快线在道岔主动梁中间增设支承台车,并且在梁上安装液体质量双调谐减振器(TLMD,Tuned Liquid Mass Damper)[6-9]。这些被动减振措施增加了磁浮道岔的制造安装成本,不利于EMS磁浮交通的推广应用,因此,很有必要从优化悬浮控制的角度探索减缓车岔耦合振动的方法。事实上,已有研究表明全状态反馈最优控制、瞬时最优控制、自适应控制等能有效抑制磁浮车轨耦合振动[10-13],但这些控制算法相对复杂,工程实施困难,且参数调节不方便,故工程实际仍采用经典的PID控制算法。
对于采用PID悬浮控制的EMS磁浮列车,已有试验研究对不同工况下车辆和道岔梁的振动响应进行了细致分析[6-9],但极少研究控制参数对系统动力学响应的影响,相关的数值模拟研究也很少见,因此,如何调整悬浮控制参数来减缓车岔耦合振动还缺乏成熟的理论指导。为此,本文结合国内某中低速磁浮线工程,建立两节编组磁浮列车多体动力学模型、PID悬浮控制模型和三段铰接式磁浮道岔有限元模型,仿真分析低速运行条件下磁浮车辆与道岔梁的耦合振动响应,重点研究悬浮控制器比例系数、微分系数对车岔耦合振动的影响,从避免磁浮车岔耦合振动过大的角度提出悬浮控制参数的取值建议。
1 车岔耦合振动分析模型
1.1 车辆动力学模型
中低速磁浮车辆由车体、二系悬挂系统、迫导向机构、悬浮架、悬浮电磁铁、直线电机定子件以及各种辅助装备组成。通常每车配备五个悬浮架,悬浮架由侧梁、托臂、抗侧滚装置等组成。悬浮电磁铁与悬浮架托臂、托臂与侧梁之间通过螺栓连接,直线电机定子件安装于侧梁底面,组成具有悬浮、导向和牵引功能的悬浮模块。抗侧滚装置由左右两片抗侧滚梁和吊杆组成,在抑制悬浮模块侧滚的同时,允许左右模块之间发生小范围的相对运动。车辆左右侧第2、5位空簧上部的承台与车体底部固结,其他位空簧上部通过可横向移动的滑台与车体相连。在第1、3位滑台和第4、6位滑台之间还设置了迫导向机构。迫导向机构由T型臂、横向拉杆和钢缆组成,用以提高磁浮车辆曲线通过能力。
在磁浮车辆结构分析的基础上,考虑到单节磁浮车辆的长度约为15 m,而磁浮道岔主动梁的长度约为19 m,因此,在满足道岔主动梁可满跨受力的条件下,为提高模型计算效率,使用SIMPACK软件建立了两节编组磁浮列车动力学模型。单节车辆的动力学模型如图1所示,其中将车体、悬浮模块、抗侧滚梁、可移动滑台、T型臂、横向拉杆、牵引拉杆等视为刚体,将二系空气弹簧简化为线性弹簧阻尼器。车体考虑除纵向运动之外的5个自由度,悬浮模块考虑6个运动自由度,抗侧滚梁具有独立的摇头自由度,移动滑台相对车体仅具有横向平移自由度,每车共有141个刚体运动自由度。中低速磁浮车辆模型的主要参数如表1所示。
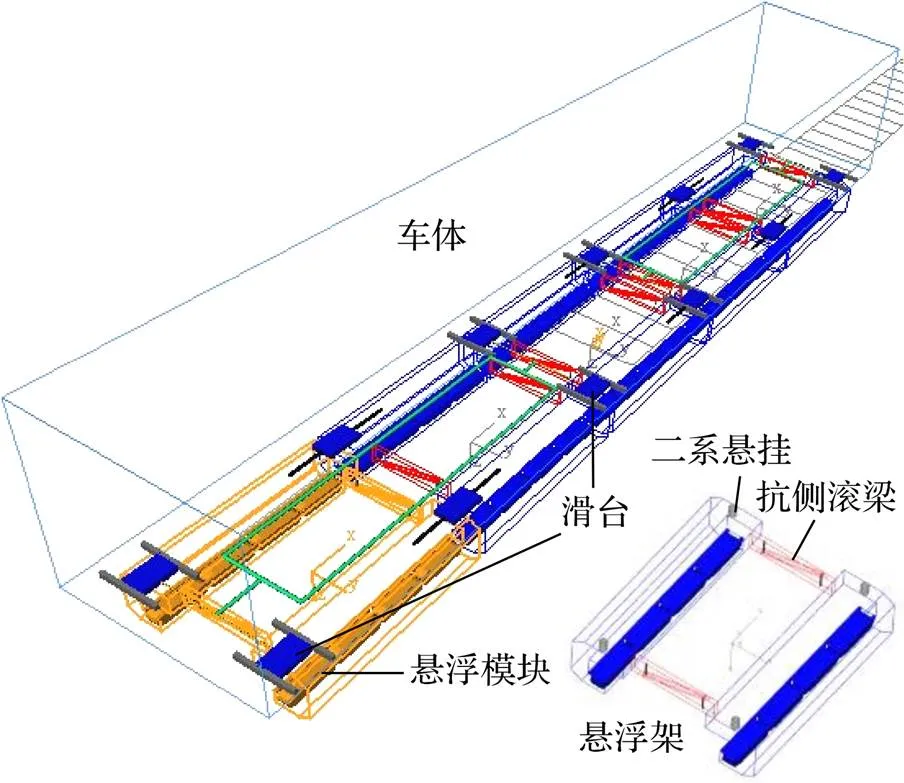
图1 中低速磁浮车辆模型
1.2 悬浮控制模型
中低速磁浮车辆每个悬浮电磁铁包含四个线圈绕组,分为前后两组,分别受控于前、后悬浮控制器,即每个悬浮电磁铁包含两个相对独立的悬浮控制点,因此,可针对单点悬浮系统(图2)进行悬浮控制系统的设计与建模分析。

表1 中低速磁浮车辆模型主要参数

u为电磁铁线圈电压,V;i为电磁铁线圈电流,A;δ为悬浮间隙,mm。
运用牛顿第二定律,可推导出单点悬浮系统的垂向动力学方程为:

根据电磁感应定律,可得到电磁铁线圈的电压和电流关系式为:

对于式(1)、式(2)组成的三阶电磁悬浮系统,一般采用如图3所示的双环控制器进行悬浮控制[14-15]。

δ0为额定间隙,mm;kc为电流环比例系数;i0为初始电流,A;s为拉氏变换因子。
图3中,电流环采用比例或比例-积分反馈控制,目的是使线圈电流以最快速度跟踪控制电压,避免电流延时引起悬浮失稳;位置环可设计为悬浮间隙、间隙速度和电磁铁加速度的反馈控制,主要目的是实现恒定的悬浮间隙。


对于式(3)所示被控系统,引入电流负反馈和比例控制,可得电流环的闭环传递函数为:

对比式(3)、式(4)可知,选取合适的比例系数后,电流环的时间常数将远小于开环电压-电流系统的时间常数,线圈电流可快速跟踪控制电压,使得悬浮系统演变为二阶系统,从而可以将电流视为位置环的控制量。
将式(1)中的电磁力计算项在平衡点(0,0)附近线性化,得到单点悬浮系统的线性化模型为:

对线性化系统采用PID控制算法,同时附加电磁铁加速度反馈以压缩系统频带,则电磁铁线圈电流的控制律为:

将式(6)代入式(5),忽略消除系统稳态误差的间隙积分项和压缩系统频带的加速度反馈项,可得到平衡点附近闭环悬浮系统的动力学方程为:

由式(7)可得到:
式中:为主动控制磁悬浮系统的特征频率,Hz;ξ为阻尼比。
由式(8)可知,如果增大间隙反馈系数,但间隙微分反馈系数保持不变,则增大,ξ减小;若增大间隙微分反馈系数,但间隙反馈系数保持不变,则不变,ξ增大。
按照上述双环控制器设计原理,使用MATLAB软件建立悬浮控制模型,并利用SIMPACK软件的MatSIM接口导入建立的磁浮车辆动力学模型。
1.3 道岔梁有限元模型
中低速磁浮交通三段铰接式道岔主要由主动梁、第一从动梁、第二从动梁、垛梁、驱动装置、锁定装置以及电气系统等组成[16]。道岔主体结构图4所示。

1.活动端垛梁;2.主动梁;3.第二从动梁;4.第一从动梁;5.固定端垛梁。
图4中,主动梁、第一和第二从动梁的长度分别为19.8 m、4.8 m和5 m,主动梁中间处梁高1.4 m,隔板间距1.2 m,腹板厚度24 mm。使用ANSYS软件建立道岔有限元模型如图5所示,其中支座处采用弹性约束,梁体选用SHELL181壳单元建模,网格尺寸为100 mm,单元数量约4.1万,详细建模过程参见文献[17]。

图5 磁浮道岔梁有限元模型
有限元模态分析表明,磁浮道岔的前六阶模态频率分别为8.60 Hz、15.77 Hz、18.99 Hz、20.90 Hz、25.47 Hz和31.99 Hz。文献[18]中实测获得的道岔主动梁第一阶横向弯曲自振频率为8.5 Hz,第一阶垂向自振频率均值为15.7 Hz,与有限元模型前两模态频率的误差分别为1%和0.4%,多个实测高阶特征频率与计算结果也较接近,说明建立的道岔有限元模型符合实际。
在后文的仿真计算中,为了模拟磁浮列车进出道岔的动力学响应,在图5模型的前后端均建立了2跨跨度25 m的混凝土轨道梁模型。此外,基于德国高速低干扰轨道谱生成磁浮轨道不平顺样本[18],将其作为动力学仿真计算时的线路不平顺激扰。
1.4 耦合振动计算方法
利用作者所在课题组开发的磁浮交通系统分布式协同仿真平台实现SIMPACK车辆模型和ANSYS有限元模型的协同仿真,仿真平台包括两台工作站、SIMPACK软件、ANSYS软件以及自主开发的接口程序和耦合计算器[19]。车辆模块和道岔模块通过接口程序与耦合计算器进行数据交互和耦合计算,耦合器控制不同计算机上的任务模块输入输出数据的收发和仿真时序,并通过网络通知相应的执行机(SIMPACK计算器和ANSYS计算器)。
2 车岔耦合振动响应特性
磁浮车辆与道岔梁强烈耦合振动多发生在车辆低速通过时,速度较高时耦合振动并不明显,因此,本节计算了车辆以30 km/h速度通过道岔时的动力学响应。选取了两组悬浮控制参数,A组参数为:=9000,=70,=500,对应的=10.8 Hz,ξ=0.04。B组参数为:=13000,和取值与工况A相同,变为14.0 Hz,ξ=0.03。
2.1 振动响应时域分析
图6分别给出了采用A、B组控制参数时头车车体质心垂向加速度、头车右侧第5位电磁铁前端的悬浮间隙和悬浮力的时程曲线。

图6 以30 km/h速度过岔时车辆动力学响应
由图6(a)可知,A组和B组控制参数对应的车体质心加速度均较小,最大值分别为0.04 m/s2和0.14 m/s2,后者较前者增加250%。由图6(b)可知,列车进入道岔主动梁以后,两组控制参数条件下悬浮间隙的调整频率和幅度均明显增大,间隙波动幅值分别为0.51 mm和0.81 mm,小于其允许波动限值4 mm。由图6(c)可知,列车进出道岔时电磁铁悬浮力有明显的突变,这是因为混凝土轨道梁和道岔梁之间存在较大的竖向刚度差;同样,车辆进出道岔主动梁时,悬浮力的波动较为剧烈,这是因为从动梁的竖向刚度明显大于主动梁,主动梁满跨受载时其梁端转角也较大。其中,采用B组控制参数时,主动梁上单个线圈最大悬浮力达到11.32 kN,较其额定悬浮力8 kN增大41.5%。
图7是磁浮车辆以30 km/h速度通过时主动梁跨中的垂向位移和垂向加速度时程响应。计算结果表明,采用A组控制参数时,主动梁跨中垂向位移最大值为1.92 mm,垂向加速度最大值为6.5 m/s2;采用B组参数时,跨中垂向位移最大值为2.7 mm,垂向加速度最大值达到13.6 m/s2;采用B组参数时,主动梁跨中垂向位移和垂向加速度幅值较A组参数分别增加40.6%和109.2%。由图7还可知,当间隙反馈系数由9000增大到13000以后,列车驶出主动梁时的振动响应更加剧烈,这与图6(c)中悬浮力的响应规律一致。
综合分析图6和图7可知,两组控制参数条件下,磁浮车辆和道岔梁均发生了明显的耦合振动。特别当悬浮间隙反馈系数增大到13000以后,由于电磁悬浮系统的特征频率更接近道岔梁的竖向基频,磁轨动力作用更为剧烈,故车辆系统和道岔主动梁振动响应更强烈。
2.2 振动响应频谱分析
图8是头车右侧第5位电磁铁前端悬浮间隙响应的频谱图。可以看出,两组控制参数条件下悬浮间隙响应的优势频率均在5 Hz以内,它们与车辆二系悬挂频率和悬浮架固有频率有关;由于悬浮间隙响应包含了道岔梁的垂向位移响应,主动梁的第一、二阶垂弯模态频率在频谱图中也有明显表现。

图7 以30 km/h速度过岔时主动梁动力学响应

图8 第5位电磁铁前端悬浮间隙响应频谱
图9给出了头车右侧第5位电磁铁前端的悬浮力响应频谱图。采用A组控制参数时,电磁悬浮力的第一、二阶主频分别为31.23 Hz和15.19 Hz;采用B组控制参数时,悬浮力的第一、二阶主频分别为15.67 Hz和31.23 Hz。可见,悬浮力的响应主频接近于道岔主动梁的前两阶垂弯模态频率。进一步对主动梁跨中的垂向加速度响应进行频谱分析,发现其主频分布与图9相似,仅幅值略有差别,不再给出。

图9 第5位电磁铁前端悬浮力响应频谱
上述频谱分析表明,A组和B组控制参数条件下,电磁悬浮力的调整频率总是与主动梁的低阶垂弯自振频率接近。对于B组控制参数,由于平衡点附近电磁悬浮系统的特征频率更为接近主动梁的第一阶垂弯模态频率,导致磁浮车辆与道岔梁的耦合振动更为剧烈。
3 控制参数对耦合振动的影响
从改变电磁悬浮系统特征频率(刚度)和阻尼的角度出发,开展间隙反馈系数、间隙微分反馈系数对磁浮车岔耦合振动的影响分析,其中k取值范围为5000~15000,k取值范围为20~80[20]。
3.1 间隙反馈系数影响分析
为探究k对磁浮车岔耦合振动的影响,将k设定为70、k设定为500,k分别取5000、7000、9000、11000和13000。相应的,平衡点附近,在4.7~14 Hz之间变化,ξ在0.40~0.79之间变化。
图10显示了头车和尾车车体质心垂向加速度随k的变化曲线。可知,头、尾车车体质心的垂向加速度均随k的增加而增大;当k>9000后,车体质心加速度幅值随k的增长速度变大,说明增大电磁悬浮的刚度会导致车体垂向振动加速度增大,从而降低列车运行平稳性。
图11给出了头车和尾车右侧第5位电磁铁前端的悬浮间隙波动量随k的变化曲线。可以发现,悬浮间隙波动幅值总体上随k的增大先快速减小后趋于稳定;当k>7000以后,悬浮间隙波动幅值差别不大。可见,k取值较大时,电磁悬浮系统的刚度较大,从而降低了悬浮间隙的波动幅值,有利于预防磁轨发生碰撞。

图10 车体垂向加速度与kp的关系

图11 悬浮间隙波动幅值与kp的关系
图12给出了头、尾车右侧第5位电磁铁前端的悬浮力方差随k的变化曲线。结果表明,k越大,电磁悬浮力的方差越大,这与图10中车体质心加速度的变化规律一致,说明增大k将加剧车辆与道岔梁之间的动力作用水平。

图12 悬浮力方差与kp的关系
图13是主动梁1/4跨、跨中和3/4跨处梁体的垂向加速度幅值与k的关系曲线。可以发现,不同位置处梁体的垂向加速度总体上均随k的增大而增大;当k>7000后,1/4跨和3/4跨处主动梁的振动加速度明显大于跨中处,说明列车进出主动梁时的车岔耦合振动更剧烈。

图13 主动梁垂向加速度与kp的关系
综合分析图10~13可知,单独增大悬浮控制器的间隙反馈系数,相当于增大了电磁悬浮的刚度,电磁悬浮系统的特征频率随之增大,并逐渐接近道岔主动梁的一阶垂弯模态频率,此时,尽管电磁铁悬浮间隙波动量不会明显增大,但车辆与道岔梁的振动加速度、电磁悬浮力方差均明显增大。
3.2 间隙微分反馈系数影响分析
将k设定为9000,k设定为500,k分别取30、45、60和70。相应的,平衡点附近,=10.8 Hz,ξ在0.17~0.4之间变化。
图14给出了头、尾车车体质心垂向加速度与k的关系曲线。可以看出,k增大后,ξ增大,车体质心加速度随k的增大呈现先减小后缓慢增大的趋势,但车体质心垂向加速度幅值均很小,总体上中等大小的k有利于降低磁浮车辆的振动响应。

图14 车体质心垂向加速度与kd的关系
图15是头、尾车右侧第5位电磁铁前端的悬浮间隙波动量与k的关系曲线,可以看出,电磁铁悬浮间隙波动量总体上随k的增大而变化不大。图16给出了头、尾车右侧第5位电磁铁前端的悬浮力方差与k的关系曲线,可以看出,悬浮力方差随k的增大先减小后增大,k在45~60范围内取值时磁浮车辆和道岔梁的动力作用水平较低。

图15 悬浮间隙波动幅值与kd的关系

图16 悬浮力方差与kd的关系
图17给出了主动梁1/4跨、跨中和3/4跨处垂向加速度与k的关系曲线。可以发现,不同位置处梁体的垂向加速度均随k的增大先缓慢减小后快速增大;当k>60后,尽管电磁悬浮系统的阻尼更大,但较大的k加剧了系统的振荡,使得车岔耦合振动更为剧烈。

图17 主动梁垂向加速度与kd的关系
由图14~17可知,随着k的逐步增大,由于电磁悬浮系统的阻尼随之增大,车岔耦合振动响应先呈现为减小趋势;但是,当进一步增大k时,超前调节作用过强,使得系统动态性能恶化;因此,过小或过大的k均有可能导致车岔耦合振动强烈。
4 结论
结合国内某中低速磁浮线工程,仿真分析了磁浮列车以30 km/h速度通过道岔梁时的动力学响应,得到以下结论:
(1)对比分析了间隙反馈系数为9000和13000时的车岔耦合振动响应,由于后者的悬浮刚度更大,电磁悬浮系统的特征频率与道岔主动梁的一阶垂弯模态频率接近,故磁浮车岔耦合振动更为剧烈。道岔主动梁梁端转角、主动梁与混凝土梁之间的竖向刚度差导致磁浮列车出岔时车岔耦合振动明显增大,其中主动梁振动加速度增长最为显著。电磁悬浮力、道岔主动梁振动加速度的响应频率以主动梁的前两阶竖弯模态为主,而悬浮间隙的响应频率则以5 Hz以下的低频为主。
(2)当间隙微分反馈系数不变、间隙反馈系数由5000逐渐增加到13000时,车体竖向加速度、电磁力方差、主动梁竖向加速度的响应幅值均随间隙反馈系数的增大而增大,但悬浮间隙波动量先快速减小后平缓变化。间隙反馈系数在7000~8000范围内取值时,磁浮车岔耦合振动响应较小。
(3)当间隙反馈系数不变、间隙微分反馈系数由30逐渐增加到70时,车体垂向加速度和悬浮间隙波动量随间隙反馈系数的增大先明显减小后平缓变化,悬浮力方差和主动梁加速度先减小后增大。间隙微分反馈系数在45~60之间取值时,磁浮车岔耦合振动响应较小。
[1]翟婉明,赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报,2016,51(2):209-226.
[2]Fichtner K,Pichlmeier F. The Transrapid guideway switch test and verification[C]. Shanghai:Proceedings of the 18th International Conference on Magnetically Levitated Systems and Linear Drives,2004:624-631.
[3]李莉,孟光. 慢起慢落时磁浮车辆与钢轨道框架耦合共振分析[J]. 振动与冲击,2006,25(6):46-48.
[4]殷月俊,罗汉中,黄醒春. 高速磁浮道岔振动响应的原位实测[J]. 上海交通大学学报,2007,41(4):658-663.
[5]Zhao Chunfa,Gu Xingtao,Xiao Zhou. Dynamic analysis of maglev train and switch beam coupled system[C]. Chengdu:Advance in Environmental Vibration,the 5th International Symposium on Environmental Vibration,2011:528-533.
[6]靖仕元. 多重调谐质量调谐阻尼器的磁浮道岔减振方案[J]. 铁道工程学报,2019,36(4):80-83,89.
[7]柴小鹏,汪正兴,王波,等. 磁浮工程道岔梁的TLMD减振技术研究[J]. 世界桥梁,2017,45(2):60-65.
[8]刘大玲. 中低速磁浮道岔动载试验方法研究[J]. 城市轨道交通研究,2017,20(5):89-92.
[9]罗华军,吴志会,佟来生,等. 中低速磁浮交通车岔耦合振动研究[J]. 电力机车与城轨车辆,2018,41(1):5-8.
[10]王辉,钟晓波,沈钢. 弹性轨道梁上磁悬浮控制方法[J]. 交通运输工程学报,2013,13(5):33-38,46.
[11]黎松奇,张昆仑,刘国清,等. 基于逆系统方法的磁浮列车非线性控制[J]. 控制工程,2017,24(8):1542-1546.
[12]李晓龙,翟明达,郝阿明. 基于输出饱和条件的磁浮列车悬浮控制参数优化[J]. 国防科技大学学报,2017,39(4):149-153.
[13]周丹峰,李杰,余佩倡,等. 磁浮交通轨排耦合自激振动分析及自适应控制方法[J]. 自动化学报,2019,45(12):2328-2343.
[14]李云钢,常文森. 磁浮列车悬浮系统的串级控制[J]. 自动化学报,1999,25(2):107-111.
[15]刘恒坤,常文森. 磁悬浮列车的双环控制[J]. 控制工程,2007,14(2):198-2000.
[16]曾国锋,袁亦竑,吉文,等. 长沙中低速磁浮工程的道岔设计与调试[J]. 城市轨道交通研究,2016,19(5):44-48.
[17]张宇生,赵春发,周文,等. 不同约束条件下中低速磁浮道岔主动梁自振特性[J]. 铁道标准设计,2020,64(4):22-27.
[18]任晓博,赵春发,冯洋,等. 中低速磁浮车辆-轨道-桥梁垂向耦合振动仿真分析[J]. 铁道标准设计,2019,63(2):70-76.
[19]李倩,黄海于,冯洋,等. 磁浮交通系统动力学分布式协同仿真接口的设计与实现[J]. 计算机应用,2019,39(S1):164-167.
[20]赵春发,翟婉明. 常导电磁悬浮动态特性研究[J]. 西南交通大学学报,2004,39(4):464-468.
Influence of Levitation Control Parameters on Coupled Vibration Between Maglev Vehicles and Switch Girder
YANG Zhinan1,FENG Yang2,LIU Dongsheng2,ZHAO Chunfa2
(1.China Railway First Survey and Design Institute Group Co., Ltd., Xi’an 710043, China;2.State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
In this paper, a dynamic model of two-car maglev trainset is built considering the PID levitation control system, meanwhile, a detailed finite element model of the switch girder is also established. Then, they are used to calculate dynamic response of maglev train with different levitation control parameters whenit passes through the switch girder at a speed of 30km/h. The simulated results show that the levitation airgap fluctuation become larger when the airgap feedback coefficient is small, which is unfavorable for train ride safety. With the increase of airgap feedback coefficient, the characteristic frequency of electromagnetic levitation system gradually approaches the first-order vertical bending modal frequency of the switch girder, which leads to stronger coupled vibration. When the airgap velocity feedback coefficient is small, the damping of electromagnetic levitation system is small, so the vibration acceleration of carbody become larger. If the airgap velocity feedback coefficient is quite large, the coupled vibration is violent due totoo strong lead compensation effect. In order to alleviate the coupled vibration between maglev vehicles and the switch girder, it is suggested to select the airgap feedback coefficient between 7000 and 8000 and the airgap velocity feedback coefficient between 45 and 60.
maglev train;switch;feedback control;coupled vibration;numerical simulation
U237;U441+.3
A
10.3969/j.issn.1006-0316.2022.02.006
1006-0316 (2022) 02-0038-09
2021-07-09
中铁第一勘察设计院集团有限公司课题:磁浮道岔优化创新及选型研究(院科18-05);国家重点研发计划课题子任务:高速磁浮车辆动力学性能匹配设计理论与技术(2016YFB1200602-15)
杨志南(1991-),男,天津蓟州人,工程师,主要从事铁路站场设计工作,E-mail:1569156195@qq.com。*通讯作者:赵春发(1973-),男,湖北仙桃人,博士,研究员,主要研究方向为轨道交通工程动力学,E-mail:cfzhao@swjtu.edu.cn。
