铁路货车轮轴自动传输装置的设计★
2022-02-28张晋塬齐海强吴文俊
王 兴,张晋塬,齐海强,王 欢,吴文俊
(1.太原科技大学计算机科学与技术学院,山西 太原 030024;2.晋西铁路车辆有限责任公司,山西 太原 030027)
引言
铁路货车的轮轴是货车的重要组成部件,轮轴的新造和检修都要对其进行一系列严格的质检[1]。随着科技的快速发展,零件的运输过程逐步实现无人化和智能化。目前,针对火车轮轴的传输装置,国内外[2]企业和研究人员进行了大量研究。研究成果在方案和应用上都能够实现火车轮轴的传输,且有各自的技术特点。1958年,美国成立了世界上第一家搬运机器人公司,制造了机械手式机器人,1966年,研制出“哈迪曼系统”,2017年FANUC集团在上海展示出4轴机器人,中国第一台重载机器人由上海交通大学机器人研究所研制出TPR系列机器人。然而,这些设备及方案,存在有自动化程度不高,传送效率低,设备研制成本较高,通用性不灵活及检测设备无法实现联动控制等问题[3]。在检测过程中我国最常见的运输方式是通过人力或者搬运机器人(机械手)来完成作业。然而,传送带传输的速度较低、自动化程度不高,搬运机器人传输的距离较短、往返于各个检测工位相当费时、安全系数较低且两种运输方式都需要人工操作辅助来完成,造成了劳动强度过高、检测效率低、成本大。
1 整体设计
1.1 设备的组成
铁路货车轮轴自动传输装置基于物联网的三层基本架构设计,由感知层(包括光电检测单元[4]与摄像机单元)、控制单元、通信系统和工作系统(包括电动伸缩导轮装置、微型电动推杆和传动小车)等部分组成。
系统在设计上考虑以下特点:一是感知层使用光电检测单元,通过对被检测对象发出检测光线,接收装置再通过对返回光线的强弱情况或有无对被测物体进行检测。由此可以判断火车轮轴实时位置,控制中心根据此位置信息做出控制决策。并配有高清摄像单元由图像传感器、外部报警、控制接口等部分组成,可以实现避障、远程察看等功能。二是利用机器学习算法对摄像机返回的图像或视频数据进行智能识别。三是工作层的电动伸缩导轮装置控制方便,响应速度快可以快速实现自动传输小车的装载和卸载工作,大大提高其运输效率。转向结构可以对运输轮轴实现90°旋转,以此实现对轮轴不同检测工位的检测。四是根据控制系统的功能与指令特点,构建对应的通信层的网络传输协议,满足实时通信快速控制的需求。
1.2 工作原理设计
首先,自动传输小车装置内设置有四个光电检测单元,分别安装于小车托轮架四角处的电动伸缩导轮装置的周围,光电检测单元感知并收集火车轮轴的实时位置信息;其次,高清摄像单元位于自动传输小车前端用于感知并探测前方障碍物;然后,控制层与感知层和工作层进行通信,通过接收感知单元和高清摄像单元的信号,识别火车轮轴及的实时位置以及判断前方是否由障碍物,并根据所感知的位置信息和判障信息,对工作层的各个工作单元发出相应的信号,并以此做出决策;然后,通过电动伸缩导轮装置与控制器通信连接,用于接收以及控制器通讯连接,当控制器控制电动伸缩导轮装置伸出时,控制器发出启动信号,控制器的控制信号以控制导轮的伸出与收缩;最后,利用传动小车与托轮架固定连接驱动传动小车运动。转向装置安装于驱动小车主体上方与托轮架固定连接,与控制器通信连接,用以接收控制器的控制信号,将轮轴旋转90°后置于另外的传输小车驶置对应的检测工位。综上所述,可以实现对火车轮轴自动传送到检测工位进行检测的功能。
1.3 工艺设计
小车模型设计如图1所示。该设备自动控制往返原理首先当按下启动按钮后,小车通过光电传感器判断是否处于初始位置,定位轮轴位置成功之后伸出电动推杆将轮轴固定,处于托轮架的四个电动伸缩导轮伸出由驱动电机驱动小车,在行驶过程中通过摄像头防撞预警系统以及超声波雷达测距判断前方障碍物,若前方有障碍物则停止运行,蜂鸣器报警且将该信息发送到移动设备,待障碍物避开之后,继续运行将轮轴放到指定工位进行检测,若此项检测完成需要进行下一项检测小车需运行至接轨处与下一小车进行交接,直至将轮轴检测完成,小车返回初始位置。
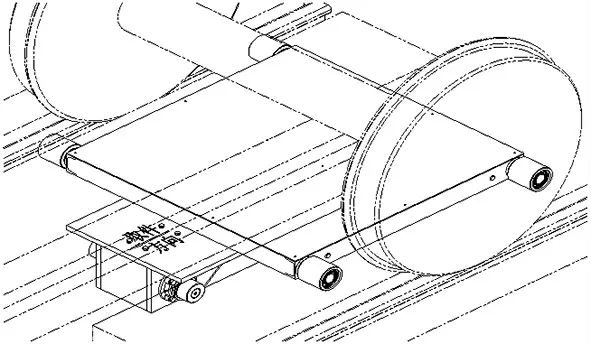
图1 小车模型
2 硬件设计
2.1 控制器设计
控制器是整个运输小车系统的核心部分,它将主控电路板、传感器单元、Wi-Fi模块、导航器、电动推杆等集成到一起,通过上位机plc对主控制器进行通信。主控制模块可以分为监测系统模块和小车控制模块。小车控制模块采用Simens的S7-200型PLC,CPU为CPU 226CN。小车控制模块主要进行数据信息管理、现场远程分布式I/O控制管理等功能。监控模块用于实时监控各个对象的运行状况,实时监控轮轴及转向架的检测信息,同时对主控制模块进行自诊断。
小车控制模块主要对运输小车进行取卸货控制、突发事件控制及提供检修信息存储等功能,运输小车控制系统主要包括西门子S7-200 PLC控制器、PROFIBUS-DP通讯模块从站模块EM227及PRB信号模块处理单元,通过232总线以PPI协议方式与人机界面相连。控制器示意图如图2所示。
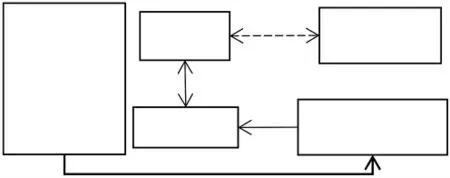
图2 控制器示意图
2.2 智能搬运模块
智能搬运模块主要是针对小车的突发事件,例如避障信息的处理,以及对轮轴的运输量进行记录。
有轨小车寻线模块。该控制器基于ARIMAX模型结合了GPC算法和PID控制算法,其中GPC算法如式(1)所示:
式中:X(c)表示输出向量,V(c)表示输入向量,α(c)表示零均值白噪声序列;r,k,r阶p-1的多项式由Z(p-1),Y(p-1)及U(p-1)表示。
定义目标函数为:
式中:n为最大预测范围;m为控制范围且n≥m。
PID增量式控制算法如式(3)所示:
式中:ΔA(c)为PID调控参数;Cu是比例系数;tv是调控时间;t1是积分时间;B(c)为预计输入与实际输出的差值;t0是微分常数;ts是采样时间;Δ=1-p-1是差分算子。
二者整合后可得式(4):
式中:Ga,Ha表示丢番图方程式;表示静态增益项。通过PID和GPC二者算法结合得出的系统输出值可以使小车在寻线过程中稳定运行。
2.3 避障预警模块
小车采用摄像头防撞预警系统,该控制是由图像传感器、图像采集模块、图像分析处理模块以及小车报警模块组成。通过CCD摄像机收集小车前方的图像信息,利用DSP数字信息处理器对有用的图像进行分析,识别小车前方的障碍物。
当障碍物距离小车非常近的时候,对于采集的障碍物信息被DSP处理器分析过后,该信号被放大交由单片机分析处理,控制小车的停止以及后退。
2.3.1 小车测距模块
测距主要通过超声波测距传感器获得信号来实现。在小车四周装有超声波传感器模块,不断地发射超声波,在发射时刻的同时开始计时,途中碰到障碍物后立即返回,超声波接收器收到反射波后停止计时。
测距的公式表示为:D=VT.
式中:D为测量的距离长度,V表示超声波在空气中的传播速度,T表示测量距离超声波传播的时间差。
2.3.2轮轴位置监测模块
光电检测开关具有灵敏度高、响应速度快、稳定可靠等特点,满足实时检测的系统需求,故本系统选用光电检测开关作为实时检测系统。光电检测开关位于系统的感知层,它是将输入电流通过发射器转换为光信号射出,接收器根据被检测物对光束的遮挡或反射,由同步回路选通电路来进行判断,并利用通信系统将检测信号传输给控制器。在传输机器人的整个工作过程中,光电检测开关一直处于工作状态不断发射出光信号到火车轮轴上,对其实时位置进行检测,控制中心根据此位置信息做出控制处理。
2.4 系统通信设计
该传输设备不仅要满足运输轮轴的基本要求,在布线方面也要尽量减少,系统将手持控制器与计算机直接进行无线通讯,可以直接远程控制小车启停以及前后移动,计算机与PLC之间实行RS-232/RS485串行通信,控制按钮、指示灯、蜂鸣器、电动推杆、导航器与PLC之间用有线电缆以节约成本(如图3所示)。
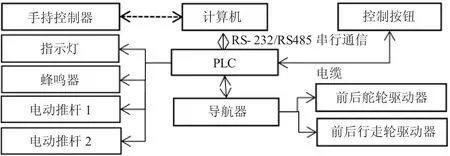
图3 系统通信设计图
无线局域网内部通信协议采用IEEE 802.11协议。控制器与服务器、控制器与节点之间通过相应指令进行通信,信息指令内容如下:服务器实时监控各个节点及控制器信息,当小车出现故障后,及时将数据传送到服务器,并在人机交互界面进行显示。
4 系统软件设计
本系统采用visual-basic程序语言设计,不仅要满足小车运输轮轴的基本要求而且充分考虑了用户的便捷性,设置了监控界面、数据记录、参数设置、故障查询、用户权限和远程控制等多个模块,用户可根据系统界面进行操作。监控界面有日期、设备运行状态、功能按钮等部分。数据记录模块中,小车对当日运输轮轴的个数进行记录,用户可以实时查看运输工作量。参数设置模块完成控制器对计算机的无线连接,对设备名称、IP地址等参数进行设置。故障查询模块可以让检修人员通过该模块做出快速判断并处理,例如小车与人机交互界面连接失败;小车驱动系统发生故障;运输小车走到目的地未能减速和定位;微型电动推杆无法伸出与收缩;小车对于前方障碍物无法避障等。
5 结论
货车轮轴自动传输装置采用PLC技术、雷达测距技术、人机智能交换界面等先进技术,在提高了检修过程中效率的同时,还避免了因为人工操作失误造成的成本大的问题。该装置在我国的投入使用,使得现场工作人员避免了繁忙的体力作业,有效地改善了由劳动强度过高以及在实时检测轮轴及转向架的时间段内带来的人力不足的问题,下一步工作将对运输不同直径的轮轴以及转向方面做出更进一步的优化研究。
