塔式太阳能热发电站定日镜立柱复测技术
2022-02-04郭亚真张海龙
杨 帅,郭亚真,张海龙,孟 宁
(中国电力工程顾问集团西北电力设计院有限公司,陕西 西安 710075)
0 引言
在全球新能源发电占比日益增大的背景下,塔式太阳能热发电因具有大规模、低热损、高聚光比、高运行温度、可储能发电、输出电力高稳定性及可调性等优势而具有良好的发展空间和应用前景。
塔式太阳能热发电站主要由聚光集热、热传输和储能、常规发电等3部分组成。其中,聚光集热部分由大规模的定日镜场和位于吸热塔顶端的吸热器组成。定日镜的追日反射精度是非常关键的参数,只有精度足够高,才能保证太阳光能量准确反射聚集到吸热器上,保障热发电系统的工作效率[1]。为了提高定日镜的跟踪精度,需要精确确定当前太阳位置、定日镜位置、吸热器位置之间的相对关系,才能解算出定日镜的法线方向。精确的定日镜立柱信息是镜场跟踪控制系统必须输入的参数,如何提高定日镜立柱的复测精度和效率对于工程实际应用具有重大现实意义。
1 立柱安装误差分析
本文以我国西北地区某塔式太阳能热发电项目作为工程实例,该项目布置如图1所示,镜场区域共埋设超过1万根定日镜立柱,在其上面安装定日镜,将太阳光反射至位于吸热塔顶部的吸热器内,将熔盐加热到560 ℃,并将热量进行储存;系统设计储热时长13 h,储存的高温熔盐通过换热产生高温高压的蒸汽,推动汽轮机组进行发电,年发电量约1.98亿 kWh。

图1 塔式太阳能热发电项目布置图
定日镜主要由立柱、镜面、镜架、跟踪传动装置和控制系统组成,定日镜的工作原理如图2所示。在不考虑立柱加工误差和定日镜组装误差的情况下,可以认为定日镜的镜面反射中心与立柱端板中心具有固定的相对位置关系。为了便于分析,本文认为镜面反射中心与立柱端板中心是重合的。立柱安装过程中存在的误差主要包括立柱中心位置误差、角度误差和立柱倾斜误差共3类[2]。

图2 定日镜工作原理示意图
1)立柱中心位置误差
立柱中心位置误差如图3所示。其中:O为太阳在定日镜面上的实际入射点位置,O'为设计入射点位置;s为太阳实际入射光线,s'为设计入射光线;r为实际反射光线,r'为设计反射光线。当立柱中心位置误差较大时,将会导致定日镜反射光斑在吸热器上发生漂移,影响吸热效率。

图3 立柱中心位置误差示意图
2)角度误差
定日镜控制系统中的太阳坐标角度为方位角和高度角。其中,方位角是指太阳与正北方向的夹角;当控制系统输入日期、时间和地理位置时,可以通过太阳位置算法算出太阳的这2个角度。当定日镜初始参考角度出现误差,同样会导致定日镜反射光斑在吸热器表面的偏移。立柱方位角误差如图4所示,其中,Y为设计角度,Y'为带有误差的角度。高度角安装误差如图5所示,其中,Z为理想角度,Z'为带有误差的角度。高度角安装误差与立柱顶板平行度误差相关。

图4 方位角误差示意图

图5 高度角误差示意图
3)立柱倾斜误差
立柱倾斜误差表示的是立柱与地球表面法线不平行产生的误差(如图6所示),主要是由于立柱安装或定日镜基座随着时间推移老化而发生倾斜导致的。倾斜可以是相对于任何方向的倾斜,可以由对地表法线的倾斜角度与正北方向的倾斜旋转角度表示。

图6 倾斜误差示意图
以示例项目为例,对定日镜立柱施工安装的要求和复测精度的要求见表1所列。

表1 立柱安装与复测精度要求
2 立柱复测技术设计
立柱复测技术设计主要包括临时基准点(temporary reference point,TRP)测设和利用测量工装对立柱进行测量。
2.1 TRP测设
由于项目区域广、立柱数量众多、互相遮挡严重,加上复测精度要求高,常规电力工程在不受施工影响区域布置一定数量固定基准点的做法无法满足立柱复测工作的要求。因此,需要布设一定数量的TRP点并施测,作为开展立柱复测工作的基础。
2.1.1 TRP布设
基于已经施工完毕的混凝土立柱开展TRP布设,点位选择应满足以下3个要求:
1)每一面定日镜应至少拥有一个距离不超过100 m的TRP点,相邻TRP点之间的最大距离不超过150 m,如图7所示。

图7 TRP点位布置示意图
2) TRP点位选择好之后,应采用电钻钻孔、速凝胶固定的方式将预埋件埋设在立柱柱体内作为TRP标记,按“TRP-立柱编号”的规则进行编码。钻孔位置如图8所示,距离地面的高度可以根据实际情况进行调整。预埋件的规格尺寸如图9所示。

图8 TRP点位埋设示意图

图9 预埋件尺寸图
3)在进行TRP测量时,将已连接精密圆棱镜的棱镜连接杆插入预埋件,使棱镜连接杆的突出部分横截面和预埋件管口严密连接,以保证圆棱镜中心位置的精确性。棱镜连接杆尺寸如图10所示。
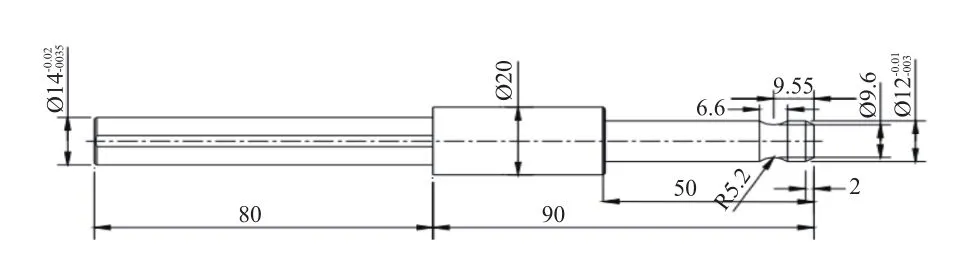
图10 棱镜连接杆尺寸图
2.1.2 TRP网测量
TRP网利用具有自动照准功能的超高精度全站仪采用自由测站边角交会法施测,附合到附近固定基准点上,自由测站点至固定基准点的观测边长不大于300 m。TRP网沿圆弧施测,设站点设在便于观测地方,每站施测2个内环点和2个外环点,一次搬站距离约100 m,每站重合2个点,如图11所示。

图11 TRP网观测示意图
2.2 立柱复测实施
立柱复测工作实施中,创新性应用特制测量工装,以保证测量数据的精度,大幅度提高作业效率。
2.2.1 测量工装使用
定日镜立柱的复测数据结果包括立柱中心位置偏差、方位角误差、倾斜误差以及立柱端板高度偏差。在示例项目中,立柱为1根长度6.0 m、直径0.5 m的中空圆柱,其中心位置无法直接确定;立柱的方位角由立柱端板上的2个定位孔确定,无法直接测量其坐标进行计算;另外两个误差数据也无法直接观测获得。为了解决这些问题,需要在复测工作中使用特制的测量工装,测量工装结构如图12所示。

图12 测量工装结构图
使用测量工装时,将配套的永磁体基座和球棱镜安装在A位置,然后将B位置安装固定在立柱端板的定位孔中即可使用。使用该方法进行测量数据传递路径短,安装使用方便,立柱复测的精度和效率均能得到很大提升。
2.2.2 立柱复测方法
立柱复测时,首先利用后方交会方式确定全站仪的设站坐标,要求每个测站至少观测3个TRP点,设站点至TRP点的距离不大于120 m,设站精度应小于±3 mm。然后将测量工装安置在立柱顶端,测量人员按顺序利用全站仪的自动照准功能依次测量工装上的三个球棱镜坐标,再利用免棱镜测量方法将立柱底端基础面的高程测出,即可根据公式计算得到立柱复测所需的全部结果。立柱复测所需坐标数据的测量顺序如图13所示。

图13 测量工装三点测量顺序图
每一根立柱的测量步骤如下:
1)测前准备:对仪器进行通电检查,确认仪器无系统故障后,导入TRP点坐标值。
2)在任意位置架设仪器,进行整平后新建项目;选择后方交会程序,输入测站点号。
3)依次选择3个测站附近的TRP点,核对坐标值后进行精确测量。
4)进行后方交会程序计算,检核交会质量,要求精度优于3 mm。
5)依次测量并记录每根立柱的四组数据后,将测量工装安置于另外一个立柱上继续测量,直至该片区域可观测立柱测量完毕。
3 立柱复测理论精度计算
3.1 边角后方交会理论精度计算
在工程测量中,利用智能型全站仪结合边角交会的方法求测站点坐标的方法已被广泛运用,如图14所示,在待定点A上设站观测水平方向角度值A以及A点到已知控制点B、C的距离,由以上观测值结合三角函数公式可以推导得到待定点A的坐标,见式(1)[3]。

图14 两点后方交会示意图

式中:XB、YB及XC、YC分别为已知点B、C的坐标;、为两条未知边平差后的值,由观测数据Sb、Sc及角度A通过条件平差求得;Sa为已知控制点之间边长值。
1)方位角中误差推导
以αBA表示BA边的方位角,αBC表示BC边的方位角,B'表示由观测边长按余弦定理求得B的值,则:

若不考虑已知方位角误差,则由误差传播定律可得:

式中:mαBA为BA边方位角中误差;mB'为B测角中误差。
mB'的推导如下,由图14可知:

将上式微分、集项,整理后得:

式中:ρ为1弧度所对应的秒值,一般取206 265。
因Sasin B' = Sbsin A代入上式得:

按误差传播定律可得:

式中:mSb、mSc分别表示Sb、Sc的边长观测中误差。
2)点位中误差推导
通过先求A点XA坐标中误差和YA坐标中误差,从而求得A点的点位中误差[4]。由图14可知:

将式(8)求微分,得到:


同理,得到A点Y坐标的中误差mYA为:

考虑到式(3),可知待求点A的点位中误差为:

由式(7)、式(12)可知,后方交会点位A的坐标中误差与交会边Sb、Sc的边长以及交会角A的大小有关,考虑本工程的实际情况,假定两条交会边的边长均为100 m,所用全站仪的测距精度为1 mm+1 ppm,那么不同的交会角时,得到后方交会点位的中误差值,结果见表2所列。

表2 后方交会不同交会角时的点位中误差
3.2 极坐标法坐标测量理论精度计算
基于两个已知控制点A和B,利用全站仪极坐标法测定待定点P的坐标值,如图15所示。

图15 全站仪极坐标法测点示意图
已知点A的坐标为(xA,yA),点B的坐标为(xB,yB),点A与点P之间的直线距离为DAP,边AP的方位角为αAP,直线AB与AP之间的夹角为β,则P点坐标(xp,yp)的计算式为:

由于αAP= αAB- β,在不考虑已知方位角误差的情况下,可得:

设DAP的中误差为mS,将式(13)进行微分,并根据误差传播定律可得:

因此:

结合工程实际情况,假定测站点到工装棱镜的距离为100 m,所使用的全站仪标称测距精度为1 mm+1 ppm,一测回方向中误差为0.5"。由全站仪方向中误差可知,半测回方向值中误差为×0.5";则×0.5" =1.0";根据式(16),计算全站仪测点的理论精度mP= 1.20 mm。
3.3 立柱复测坐标理论精度计算
在不考虑控制点误差的情况下,立柱复测坐标的中误差主要包括测站后方交会定位中误差mA和全站仪极坐标法测点中误差mP。因各项误差相互独立,则立柱复测坐标中误差为:

由表2可知,当全站仪后方交会角为30°时,测站后方交会点位中误差最大,为3.11 mm。根据式(17)可以计算出立柱复测理论坐标中误差为mV= 3.33 mm。
实际测量中,一般要求交会角应在30°~120°之间。在现场测量时,测量人员会特别注意交会点位的选择,避免出现极小或极大的交会角。当交会角在30°~120°之间变动时,由表2可知,此时后方交会点位中误差会变小,表明立柱复测坐标的理论精度会更高,将小于3.33 mm。这说明运用高精度全站仪自由设站后方交会定位方式进行定日镜立柱的复测工作可以满足项目所提出的5 mm精度要求。
4 立柱复测实际精度分析
为了评估立柱复测工作的实际测量精度,测量人员在现场随机选择了97根立柱重新进行了第二次测量,两次测量结果部分数据见表3所列。

表3 立柱两次测量的部分结果数据
对每个立柱中心坐标,根据两次测量结果可以分别计算出北坐标的差值dx和东坐标的差值dy。其中,dx的最大值为6.5 mm,最小值为-5.5 mm;dy的最大值为6.8 mm,最小值为-9.0 mm。dx值和dy值的分布如图16所示。

图16 dx值、dy值分布图
根据每个立柱数据的双观测值之差d求观测中误差,按公式(18)进行计算:

对观测数据进行整理计算,求得北坐标中误差mx= 1.80 mm,东坐标中误差my= 2.35 mm,故利用实测数据计算的定日镜立柱复测坐标的精度为:
该结果与理论精度计算结果非常接近,这表明将全站仪后方交会的方法应用到光热项目定日镜立柱复测工作中切实可行。
5 结语
本文基于塔式太阳能热发电项目实际需求,通过建立TRP点的方式对控制网进行优化设计,结合测量工装的使用,利用全站仪自由设站边角交会方式完成定日镜立柱复测工作。理论和实测精度计算分析表明,该技术设计方案能够满足远超常规电力工程标准的高精度要求,并能够有效提高工作效率,降低工程成本。
