大数据在船舶港内操纵避碰方面的应用
2021-12-20黄昌均珠海港引航站
◎ 黄昌均 珠海港引航站
最近几年,随着我国航运和港口事业的发展,港内航行的船舶越来越多,交通流越来越复杂,密度也越来越大,船舶相互碰撞的事故增加了很多,使得船舶在港内的航行和操纵的风险越来越高,由于粗心大意、人为操纵失误酿成事故屡见不鲜,随着人力资源成本的不断上涨和导航技术的持续优化,大数据的运用、人工智能的升级,协助船舶操纵和避碰的技术因此变得越来越成熟。大数据协助操纵的应用是一套非常复杂且高度智能的集成系统,根据过往的数据和现有的数据自动运算得出结果,避免碰撞是这套系统的灵魂。可靠可信的协助船舶防撞预报系统必须具备以下条件:避免碰撞移动和不移动的障碍物;多个物标在港内同一个水域内航行时,协助避碰,保持足够驶过让请的距离;避碰后协助船舶恢复到原先的航路中来;建立港内交通流和船舶运动数字模型,精度准确,更好的贴近实况;考虑外部的相关条件;迅速、有效且精准的给出系统反馈。
1.大数据信息集成平台
何谓大数据?其实很简单,大数据就是海量、巨量的数据,这些数据来源于众多船舶随时随地产生的数据,在大数据信息平台中,任何微小的数据都可能产生不可思议的价值。大数据有4个特点,为别为:大量、多样、高速、价值。
在大数据时代,每个行业都会享受到大数据所带来的便利。因此,大数据运用于各大传统行业是整个社会前进发展的方向,面对发展和完善的信息化建设,大数据聚合成为常态亦是一种趋势。利用大数据技术协助解决传统技术克服不了的问题,从而推动各行各业实现技术的创新和发展。
2.导航大数据的系统分析与信息采集
在港内操纵船舶时,导航大数据能够通过人工智能,提前规划出最优的进出港航路,通过GPS的数据得到相关类型船舶进出港的航行轨迹,并加以计算,同时能够计算出预防碰撞的核心操纵方式,最终得出进出港操纵的最佳综合方案。
(1)通过高速运算、模仿学习等先进的人工智能可以编制船舶进出港的最佳航路,高度适应当时环境的各种安全要求,并确保船舶进出港航路设计的合理性,同时,它对海图电子数据的准确性、助航设施的稳定性也提出了更高的要求,很多港口在这方面是一个季度更新一次数据的。
(2)在信息数据方面,我们必须把与船舶动态和航行安全息息相关的重要航行数据详细采集。这些资料的大数据都可以在相关仪器的电子设备中实时获得,通过人工智能的运算,实现船机互动、实时控制,确保船舶始终按照预设的航路稳定的进行操纵。在定位系统中,人工智能及时获取船舶的基本位置,核对航向、航速,避免偏离航路,并在整个进出港的过程中记录航行轨迹数据,校对航线偏差,统计进大数据库,以便下一次更好更合理细致的规划航路。
(3)在预防防撞的核心功能系统中,通过雷达数据、AIS数据、ECDIS数据及时获取船舶周围其他船舶的位置信息和附近环境的相关信息,通过人工智能的大数据,做出避免碰撞的相应分析,再检查核对,得出对船舶安全的影响最小最完善的避碰操纵方案。
(4)在综合操纵管理系统中,将自动接收的船舶航行驾驶数据进行全面的优化整理,高度运算分析,并结合船舶通讯系统里的内容,制定出最佳的操纵方案。这样可以将碰撞危险降到最低,提高船舶在港内操纵的安全性,保证操纵方案的稳定性。此外,系统决策的相关信息传输到船舶控制的有关部门,更加完善港内操纵船舶的大数据。这些大数据的应用为船舶在港内的操作提供更多更有效的方案,也为船舶更加安全的运行提供更多更好的有利条件。
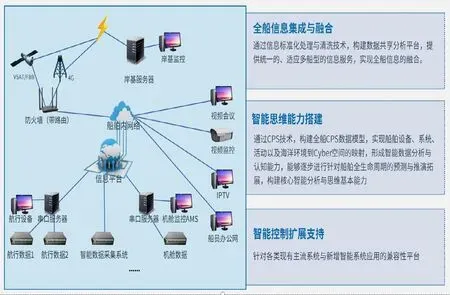
图1 大数据信息集成平台
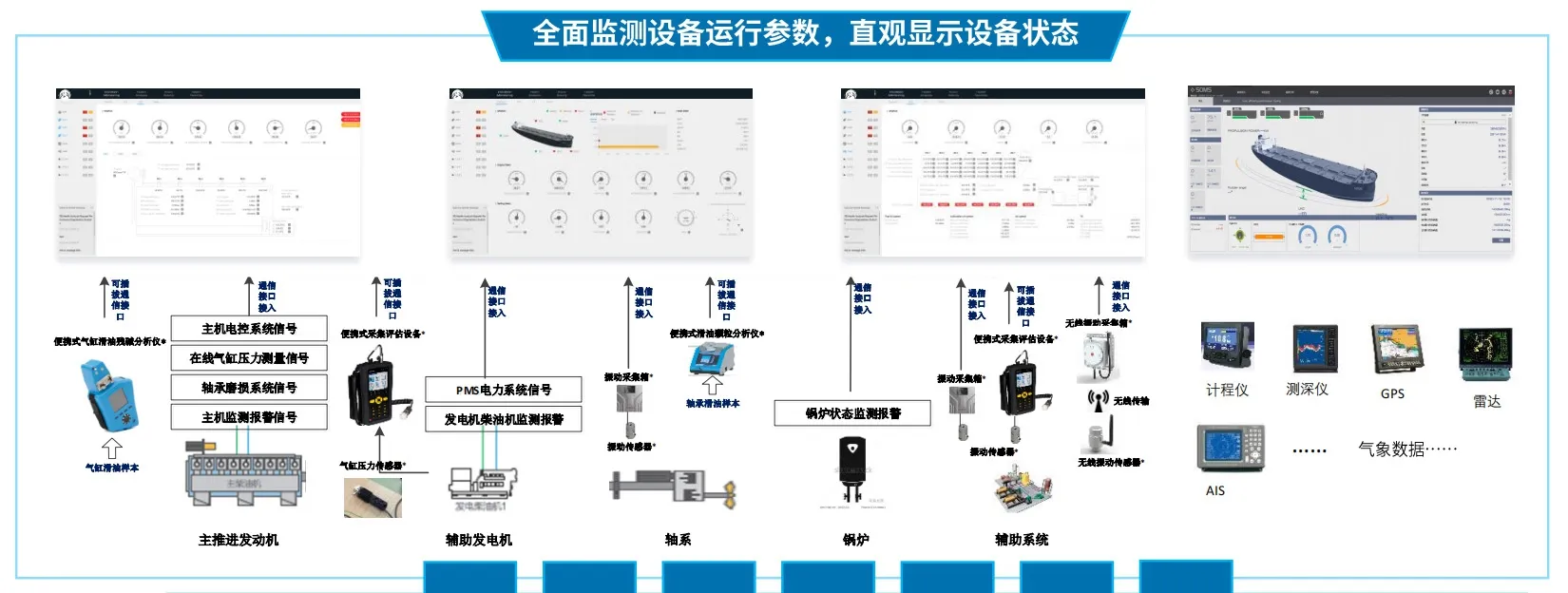
图2 大数据的信息采集设备
3.导航大数据的操纵应用
3.1 操纵大数据的准确性
船舶在港内操纵时,由于船舶所处的平面和大多数障碍物所处的平面都位于同一海平面上,它们之间的数据差异就是一个二维空间,因此处于范围可控的比例之中。这样我们就可以使用专业的函数来模拟船舶数据以及可能影响船舶安全的其它物体数据,以实现运动中的物体具有高精度高数据的数学模型,固定不动的物体具有高精度低数据的数学模型。这样就把整个平面模拟成基于数学公式的一种大数据。那么采集的数据会变得相当精准,运算也会变得更加精细,自然得出的数据就会变得更加准确。在很多科研项目中,这种高精度的大数据算法经常用于人工智能机器人的复杂障碍避让运动中。
3.2 模拟决策模型
针对港内操纵的决策模型,基于计算机逻辑的方法进行人工智能网络的自我学习,建立一种动态模拟船舶域模型。经过研究,考虑到人、机、环、管因素的影响,建立了统一的领域模型。环境因子子模型的构建只适用于两个物体之间的避碰,必须对它进行改良和优化,基于“模拟视觉”的避碰智能决策模型依赖于模拟逻辑的并行多决策模块,将决策适用于连续避碰的操作。模拟逻辑和 ARPA雷达数据、AIS讯号数据形成一个确保最优避让操作结果的网络模型。这一整套复杂的模拟决策系统模型为单船提供可靠有效的智能防撞决策保障。
3.3 大数据在操纵应用中的要求
大数据港内操纵航行系统由综合导航系统、开阔水域和狭窄水道自动避碰系统、航路设计和优化系统、恶劣天气航行系统、应急事态处理系统、靠离泊控制系统等组成。
操纵系统的设计和布置,应在系统出现单一故障(仅适用活动部件,不包括单舱失火或水线以下单舱进水的情况)的情况下,仍能继续实现预期的操纵航行功能。综合导航系统应满足MSC.252(83)决议修正的综合导航系统(INS)性能标准要求。自动避碰系统的避碰决策和避碰操作应能满足“国际海上避碰规则”要求。恶劣天气航行系统应能使得船舶在黑夜、暴雨、大雾等恶劣天气环境条件下实现自主航行。应急事态处理系统应能使船舶自主航行功能受损时,进入故障安全模式。
4.结论与展望
在大数据和人工智能的实践运用中,一些专业的智能船舶制造企业更早地把它们应用于船舶航行操纵的测试。大数据的重中之重是完成“防撞知识库",并考虑现实场景中环境和突发情况对船舶安全的影响,在测试和实践中不断改进算法,可以更准确地优化碰撞避碰决策,参考数据的选择非常重要,通信和协调也必不可少,只有把他们全部综合在一起才能实现真正意义上的智能避碰。