视频节点协同的雨量反演精度控制模型
2021-12-14王美珍刘学军
王 兴 ,王美珍 *,刘学军
(1. 虚拟地理环境教育部重点实验室(南京师范大学),江苏 南京,210023;2. 江苏省地理环境演化国家重点实验室培育建设点,江苏南京,210023;3. 江苏省地理信息资源开发与利用协同创新中心,江苏南京,210023)
1 引 言
作为城市雨洪模拟最基础的输入之一,高时空分辨率的降雨数据对城市内涝的精准建模、科学管理至关重要[1-3]。降雨具有复杂的时空变异性,在全球气候变化、城市化的“双重”作用下,城市“热岛”、“雨岛”现象频发,致使城市降雨的随机性、复杂性更为突出[2-4]。当前的降雨观测体系仍难以满足精细化城市雨洪模拟对高时空分辨率降雨数据的要求,具体而言:
(1)基于地面雨量计是降雨测量的基本手段,该方法空间离散性明显,难以准确的反演复杂地形条件下(如山区、城市等)区域的降雨信息[5-6]。近几年,虽然新型高精度雨量计(如:光学、电子雨量计等)取得了快速发展,但受限于成本过高,难以大范围应用,空间代表性不足的问题仍未较好解决[1,6];
(2)基于高空遥感(如:雷达、气象卫星、对地观测卫星等)的间接观测,实则是建立卫星在数百/千米外的高空拍摄的地表影像与降雨量之间的映射关系。随着卫星传感设备精度的提高以及数据同化技术的应用,降雨预测精度不断提升。但遥感降水反演结果仍需辅以地面测量校正,此外该方式难以满足城市内涝监测等应用对降雨数据时间分辨率的需求[6,7];
(3)将地面观测和高空遥感耦合的雨量估算,需在不同的数据接口间进行,各种信号的组合常比预期更为复杂且效果不佳,实时性较差,该问题在进行短时降雨量预测时尤为突出[9]。
如何发展高时空分辨率的降雨观测手段,突破降雨输入对城市雨洪模拟的桎梏成为领域关注的重点。众多国际组织与机构(如:国际水文计划、国际水文科学协会、美国航天局等)发起发展降雨观测新手段的倡导[8-12],并取得一定成果。发展至今,形成了包括无线链路信号[12]、车辆雨量计[1]、智能手机[14]、监控摄像机[15-16]等多种传感信息、设备在内的降雨感知手段,为高时空降雨数据的生产提供新的增长点[8,17]。相较而言,广泛密布的监控相机增加了雨量观测点,可提高观测的空间密度;高速迅捷的视频传输、处理技术能缩短降雨观测周期,故可极大的提高降雨观测的时空分辨率。此外,研究可在现有的监控设施的基础上进行,充分利用现有资源的同时,极大的降低成本。特别是在全球水文/气象雨量观测站点急速下降且分布不均的今天[6,9],以监控相机为基础的“视频雨量计”(Video based rain gauge,VRG)成为降雨观测未来发展的重要方向。
当前,VRG 的研究已取得部分成果[8,16],但仍处于探索阶段。已有的研究成果主要聚焦于单个VRG 的雨量反演精度,而高时空分辨率降雨信息收集,则须依靠视频传感网(VRG 网络)中各节点的协同观测方可实现。对于VRG 网络而言,复杂多变的视频场景给雨线识别算法带来了极大的挑战,导致降雨数据精度下降的同时,各雨量计间的数据质量参差不齐,在误差传播的影响下,由其生产的区域降雨产品在实际应用中的价值将严重下降[17-18]。上述内容是VRG由当前的理论研究走向实际应用过程中不可忽视的重要问题,然而针对该问题的探讨较少。
综上所述,如何对VRG 网络生产的降雨数据进行质量控制与清洗成为本文所要解决的关键问题。本研究受地理学第一定律(Tobler′s First Law of Geography)启发,以节点的时空信息为约束,提出一种视频节点协同的雨量反演精度控制模型(Precision Control Model,PCM),通过节点间信息互验证的方式,从时空一致性、态势一致性、自相关性角度出发,构建雨量反演结果的多粒度滤波,以期实现降雨信息的高精度表达。本文研究可为基于视频的区域降雨量的生产和应用提供参考,为高时空分辨率的降雨观测体系提供支持。
2 单视频雨量估算
视频/图像中的雨像素蕴含着雨粒子的尺寸和大小信息。Garg 等人于20 世纪初对视频中雨水成像特征进行了具有开创意义的研究,至今仍对计算机视觉领域的图像/视频去雨研究具有深远的影响[15]。此外,以上研究者[15]在视频雨像素提取工作的基础上,基于相机的成像原理与降雨的气象学知识,构建雨像素与雨粒子尺寸间的映射模型,提出基于视频的降雨强度估算(Rainfall Intensity,RI)方法,构造了 VRG 的雏形。之后,国内外学者[8,16]对 VRG 的设计进行了创新和发展,进一步提升了VRG 的性能。其中,文献[16]建立基于稀疏编码的监控视频雨线提取模型(式(1)),突破复杂环境下(如:场景光照复杂变化、运动物体出现,自然风干扰等)视频雨条纹提取难题;然后,以雨滴物距(即雨滴到相机镜头的距离)测量等核心技术为缝合线,构建雨水的“视频-真实”尺寸计算模型;最后,结合降雨气象学知识,形成基于监控视频的降雨强度计算。实现过程如图1。

其中:O为视频雨像素序列;B为视频无雨背景序列;R为视 频雨条纹 序列;‖ ⋅ ‖1为L1正则化操作 ;∇x,∇y,∇t分别为垂直方向,水平方向以及时域方向的差分算子;参数λ1,λ2,λ3,λ4为可调非负权重。研究表明该VRG 以较低的硬件成本,在监控区存在运动目标,及风速小于3 m/s 的降雨场景中,仍取得了 State-of-the-Art 表现[16]。考虑到该方法在结果精度和鲁棒性上的优异表现,本文以该VRG 为基础开展相关研究。
由VRG 的实现过程可知,视频中雨线的提取精度直接决定VRG 反演结果的准确与否。通常雨线视觉特征的刻画越清晰越有利于雨线的识别[15-16],VRG 的精度越高。而不同的相机对雨粒子的刻画能力不同,进而导致即使相同的雨线提取算法在求解来自不同相机的降雨视频时,精度也会存在较大差异。实际应用中,在外界环境与视频场景中运动目标的复杂作用下,不同相机的雨量反演结果可信程度参差不齐,影响其实用价值。
3 雨量反演精度控制
包括降雨在内的许多大气及其他的环境要素的变化是各种物理、化学或生物相互作用的总和。尽管在物理机制上是确定的,但由于其复杂的交互作用尚未完全理解,致使其变化随机性仍较大[20],降雨亦是如此。结合地理学第一定律,研究认为,较小的空间范围内的降雨量数值变异较小,具有均一性、同质性、自相关性。一定空间范围内,VRG 的雨量估算值之间具有相关性,可相互验证。
PCM 从相机节点协同的角度出发,以VRG间的时空关系为约束,从单个VRG 的RI 估算值展开“纵向”分析,并对VRG 间的RI 差异进行“横向”对比,构建时空一致性、态势一致性滤波,实现RI 估算异常值的粗粒度检查;在此基础上,构建相关性滤波,对RI 反演结果进行细粒度修正。
3.1 模型变量的定义
已 有 研 究 成 果[6,13]指 出 面 向 水 文 学 应 用 需求,对于100 公顷量级的城市集水区,降雨数据的空间分辨率建议值为2 km。本文设置降雨变化的最小空间分辨率为2 km,不失一般性地,以某一2 km×2 km 的视频传感网覆盖区X为例,随机分布n台VRG。
定义:R为区域内 VRG 的 RI 反演值集合;Ri为 第i台 VRG 的 RI 估 算 值 集 合 ;Rt为 第t时 刻 区域内 VRG 的 RI 估算集合为第i台 VRG,t时刻的RI 估算值。变量间关系如下:

3.2 时空一致性滤波
地理学第一定律指出地物之间的相关性与距离有关,一般来说,距离越近,地物间相关性越大。因此,研究区X范围内的相机反演的RI 值虽有差异,仍具有相关性,即多台VRG 同一时刻对降雨事件发生与否的判别具有一致性。基于气象知识,时空一致性滤波Filter1(⋅)首先删除降雨区域RI=0 以及大于理论阈值(Rthresold)的元素,在此基础上使用箱线图法对同一时刻的RI 异常值予以剔除,将Rt更新为保证 RI 反演结果的时空一致性。

3.3 态势一致性滤波
同样基于地理学第一定律可知,雨量的时空一致性间接体现了雨量变化态势的同向性与一致性。RI 变化态势是对RI 反演结果的另一项质量检查标准。态势一致性滤波器(Filter2(⋅))以同一时刻监测区内RI 集合的中位数作为判断标准,通过式(4)计算 RI 变化矢量集合Ft|t-1,并通过式(5)将更新为


3.4 相关性滤波
Filter1(⋅)与Filter2(⋅)在区域降雨量均匀性、一致性的前提下,较粗粒度的减少降雨量观测异常值。真实世界的区域降雨量是空间连续变化的[6,19],即各 VRG 的 RI 反演结果间存在相关性。相关性滤波(Filter3(⋅)),以信息融合、模糊数学的理论方法为基础,构建当前时刻RI 反演结果的相关性计算模型与可靠性度量指标,保证降雨数据一致性描述的同时,更真实、合理的反映降雨量的时空分布。
Filter3(⋅)通过不同VRG 观测序列之间的相关性,对中的元素进行质量检查。对于本研究而言,各个VRG 的RI 估算噪声可视为相互独立的白噪声,因此RI 估算误差的分布也是正态的。参考文献[21]的研究成果,使用概率分布函数(pdf)作为VRG 测量序列的特性函数,记为pi(r),pj(r),可通过式(6)计算。为反映偏差的大小,引入置信距离测度如式(7)。


式中:σi与σj为各自的方差为t时刻 RI 估算值为t时刻第i个 VRG 与第j个VRG 所测RI 的置信距离测度。为减少对定性判断时,过于绝对化和经验化,导致结果受主观因素影响过大的问题,参考模糊理论中的相关性 函 数 定 义 ,令1,2,…,k),将 相 关 性 函 数 定 义 为使 用构 建 相 关 性 矩 阵如式(9)所示。

设置被其他VRG 观测值支持的最小值作为该VRG 的被支持程度,则各VRG 估算值被支持程度集合可表达为式(10):

4 实验与结果分析
4.1 实验数据
实验地点为南京师范大学仙林校区(如图2),研究区大小约为350 m×320 m,面积约为11公顷,小于模型对降雨最小空间分辨率的建议值(2 km),符合模型运行有效性的前提条件。
实验场地均衡布设7 台VRG 组成视频传感网,对同一降雨事件进行同步观测(如图2 所示)进而计算降雨信息(RI),并使用PCM 模型对所获取的降雨信息进行滤波,进而评价该模型的有效性。实验区域内降雨情况同质,即不存在大的山体阻碍等导致传感器观测存在不一致的情况。VRG 的布设密度为 62.5(台)·km-2,远大于当前水文学、气象学等相关研究对地表雨量观测设备布设密度的建议值[6,9,19]。选择了当前城市监控中广泛使用的相机类型(详细相机参数见表1),旨在更好的模拟PCM 在实际应用场景中的有效性。

表1 相机参数Tab.1 Camera parameters

图2 实验区布设Fig.2 The deployment in the experiment area
实验地点位于江苏省南京市,属于亚热带季风湿润气候区,雨量充足,雨热同季。每年初夏(6~7 月中旬)受锋面雨带影响,南京进入梅雨季节,降雨明显增多,大、暴雨频繁出现,为本研究提供了良好的降雨条件。2020 年 7 月 11 日、17 日实验地区共发生两场长历时降雨事件,包含小雨到大暴雨等多种丰富的降雨类型(如表2),对开展研究的验证工作具有代表性和典型性。

表2 降雨事件信息Tab.2 Rainfall event information
此外,使用距离传感监测区约150 m 的高精度电子雨量计的观测值作为验证数据。设定30 s为VRG 的观测周期,周期内各VRG 的RI 估算值的均值作为该VRG 的当前RI 读数。使用相对误差(Relative Error,RE)作为评价标准,RE 可通过下式计算获得:

其中 :REk为k台 相机的RI 计算相对 误差为第k台 VRG 第i次观测的 RI,Rk为电子雨量计第k次观测 RI,i为 VRG 的 ID。
4.2 多相机协同的雨量反演
4.2.1 模型参数率定
根据部分关于南京地区梅雨研究的统计成果[22],考虑到相机雨量估算总体偏低[14-15],设置Ethreshold=0.3/(mm·min-1), 设 置Rthreshold=0.4/(mm·min-1)。不同降雨场景中VRG 参数的设定如表3 所示,更多参数信息可见文献[16]。以大雨场景为例,VRG 参数调整雨线识别效果对比如图3。
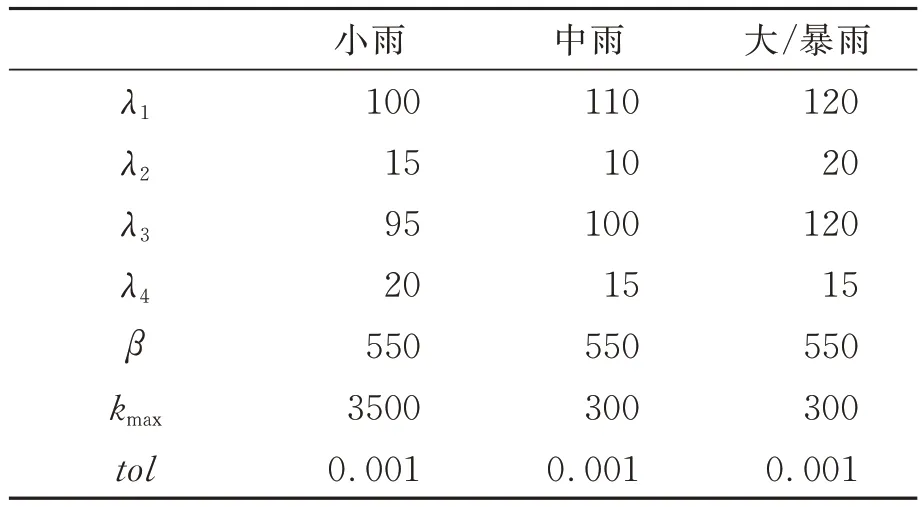
表3 雨线提取模型参数Tab.3 Parameters of rainstreak extraction model

图3 大雨场景VRG 参数调整雨线提取效果对比Fig.3 Comparison of the effect of VRG parameter adjust⁃ment on rain streaks extraction in heavy rain scene
4.2.2 结果与分析
在对VRG 的工作参数进行率定后,两次降雨事件中PCM 模型修正前后各VRG 的RI 反演结果,分别如图4,图5 所示,通过实验结果(图4~6)可知:
(1)由图4 可以发现,网络中各VRG 之间的RI 估算精度参差不齐,同一VRG 不同时刻的RI估算精度有较大幅度的波动,其可能原因主要包括:视频场景中运动目标的出现,外界环境因素的变化和干扰[14-15]等。上述问题极大降低了降雨数据的实际应用价值,因此研究如何减小视频传感网络中各VRG 生产的降雨数据质量差异,提高整个VRG 网络对雨量反演结果的可靠性,意义重大。

图4 基于VRG 的RI 估算Fig.4 VRG-based RI estimation
(2)由图 5 和图 6 可知,PCM 模型在两次降雨事件中均可有效地减少RI 反演结果中异常值的数量,提高RI 反演结果的一致性与稳定性,有效抑制了随机误差对RI 反演结果的影响;即使在不同的降雨场景中,PCM 仍能有效降低RI 相对误差的平均值(降雨事件1 降低约14.85%,降雨事件2 降低约19.9%)与标准差(降雨事件1 降低约40.87%;降雨事件2 降低约40.96%),而且RI 反演结果的最大值,最小值等指标均有不同程度的改善。可认为PCM 模型从整体上提升了降雨信息估算的精度,形成对VRG 网络雨量反演结果质量的有效控制。

图5 PCM 修正后的RI 估算Fig.5 RI estimation after PGM correction

图6 PCM 修正前后RE 对比图Fig.6 Comparison of RE value before and after PCM correction
4.3 讨论
高质量区域降雨产品的生产是环境、水文学等相关研究的基础。区域降雨量的估算质量一方面取决于数据可用性(即雨量计网络密度,数据的时空间分辨率等信息),另一方面,取决于插值技术[19]。本研究提出的PCM 模型可在不损失节点密度的前提下,有效滤除大量异常值,提高降雨观测数据的可用性。既保证了降雨观测的VRG 的空间分辨率,又降低了插值过程中的误差传播,从而为区域降雨量的高精度表达提供支持,具有重要的理论研究和实际应用价值。
5 结 论
当前的降雨观测手段仍难以满足城市水洪模拟对降雨数据时空分辨率的需求,发展新型降雨观测手段成为国内外学者关注的重点。基于监控相机的降雨估算可在现有城市监控资源的基础上,为高时空分辨率的降雨数据采集提供支持。而如何解决多台相机所获取的雨量数据质量差异问题,成为生产高精度区域降雨产品所必须考虑的难题。从视频传感网中VRG(相机)间时空关系出发,结合降雨的地理学、气象学知识,提出PCM。分别从相机的时空间范围、变化态势、自相关性等方面对视频雨量集进行质量检查,旨在为区域降雨数据提供高质量的表达。实验结果表明,PCM有效地减少视频雨量异常值的出现,降低视频场景中观测噪声对区域雨量估算结果的干扰,极大地保证区域降雨量估算结果的可靠性与稳定性,且一定程度的提高降雨量计算的精度。中、小雨场景中相对误差的均值降低约14.85%,大雨场景中相对误差的均值降低约19.9%;中、小雨场景中相对误差的标准差降低约40.87%,大雨场景中相对误差的标准差降低约40.96%。
本研究有望解决视频传感网中海量“视频-雨量”数据质量的检查、评价与清洗问题,以期推动“视频-雨量点”到“视频-雨量网”的发展,为当前降雨观测体系提供有益的补充。
