微力矩反馈自适应耦合运动控制上肢康复机器人结构及控制系统设计*
2021-12-03瞿志俊温宏愿刘小军孙松丽赵伟博罗韦昊
瞿志俊,温宏愿,刘小军,孙松丽,赵伟博,罗韦昊
(南京理工大学 泰州科技学院 智能制造学院,江苏 泰州 225300)
0 引 言
近年来,脑卒中是严重威胁中老年人身体健康的疾病,并有逐渐上升的趋势,这种疾病引发了患者肢体运动功能的丧失等症状。其中,大约有85%的脑卒中患者在发病初就有上肢功能障碍[1]。此外因事故、工伤等因素造成上肢损伤人数也很多。尤其上肢运动能力丧失,极大影响了患者日常生活;并且,上肢功能恢复比下肢恢复更加缓慢和困难[2]。因此,上肢运动功能康复治疗一直是当前的热点、难点和重点。传统的康复治疗中,治疗师难以保证训练效率和训练强度,效果受到治疗师水平的影响[3]。因此,研究人员将机器人技术应用于康复医学领域,开发上肢康复机器人。目前,世界各国已研发出了多种类型的上肢康复机器人[4-12],它们的结构特点和控制特点各不相同。区别于当前已有的上肢康复机器人,笔者设计了一种微力矩反馈自适应耦合运动控制上肢康复机器人。该机器人结构简单,并利用患者主动运动意识,充分发挥患者已恢复的运动能力进行微力矩实时反馈自适应耦合运动控制,控制机器人运动状态,更有利于患者的上肢康复效果。
1 上肢康复机器人总体设计及工作原理
人体上肢主要由肩部、大臂、小臂和手部四个部分组成,大臂与肩部通过肩关节相连,可以实现屈曲伸展、内收外展与内旋外旋三个方向的动作,小臂与大臂通过肘关节相连,可以实现屈曲伸展与内旋外旋动作,手部与小臂通过腕关节相连,可以实现屈曲伸展与侧偏动作[13]。本设计是关于微力矩反馈自适应耦合运动控制上肢康复机器人的初步试验研究阶段,只考虑肘关节的自由度并开展微力矩反馈自适应耦合运动控制研究,而肩关节、腕关节运动自由度暂不研究。所以,设计的上肢康复机器人机械结构体自由度为小臂绕肘关节的转动,即大臂固定在支座上(轮椅),小臂绕肘关节转动,如图1所示。

图1 上肢康复机器人自由度示意图
上肢康复机器人总体结构如图2。大臂护具1由螺栓固定在大臂护具固定架2上,大臂护具固定架2安装在安装轮椅9上;小臂护具7由螺栓固定在小臂护具固定架8上,小臂护具固定架8与大臂护具固定架2由肘关节轴承3装配连接。电机安装座4安装在大臂护具固定架2上,伺服电机5由螺栓安装在电机安装座4上,伺服电机5的转子与力矩传感器6固定并带动小臂护具固定架8绕肘关节轴承3转动。控制器10与伺服电机5通过数据线相连,控制电机运转;力矩传感器6与控制器10通过数据线相连,反馈力矩信号给控制器。进行康复训练时,患者坐在安装轮椅9上,右臂固定在护具上随着护具一起运动,利用患者人体的主动运动意识产生的上肢微力矩实时反馈进行自适应耦合运动控制;力矩传感器6不断实时检测患者小臂已恢复的运动能力而产生的微力矩对肘关节力矩的变化,并反馈给控制器10,控制器10不断实时修正控制电机转矩大小。这种微力矩反馈自适应耦合运动控制方法确保了上肢康复机器人正常运行时肘关节上的力矩平衡,小臂运动角速度保持不变,让患者已恢复的运动能力参与康复训练全过程,起到更好地锻炼下肢的作用,使患者上肢运动能力不断得到恢复。

图2 上肢康复机器人总体结构1.大臂护具 2.大臂护具固定架 3.肘关节轴承 4.电机安装座 5.伺服电机 6.力矩传感器 7.小臂护具 8.小臂护具固定架 9.安装轮椅 10.控制器
2 上肢康复机器人机械结构设计
2.1 小臂护具、大臂护具设计
为了考虑佩戴舒适性,设计的结构就要与上肢匹配,同时选择结构强度得到保证、密度小的轻质材料作为结构材料。因此,该康复机器人的小臂护具、大臂护具采用了小密度的轻质材料;两护具是由聚乙烯(PE)塑胶制造而成,两护具上加工有多数小透气孔便于患者大臂和小臂透气舒适、不闷热,同时两护具上还设计有绒面粘贴绑带,用于固定患者大臂和小臂,调节便利,大臂护具底端采用条形孔,利用螺栓可调节大臂护具径向尺寸大小,针对不同患者的大臂,见图3。
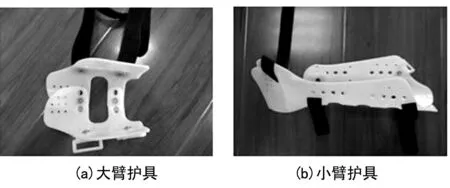
图3 上肢康复机器人大臂护具、小臂护具实物图
2.2 大臂护具固定架、小臂护具固定架设计
大臂护具固定架、小臂护具固定架装配结构见图4,大臂护具和小臂护具通过螺栓分别安装固定在大臂护具固定架和小臂护具固定架上。两固定架均是采用横截面边长为20 mm×20 mm的正方形硬铝型材按照设计方案组装搭建制造而成;因为硬铝型材的强度、刚度足够满足上肢康复机器人的设计要求,且硬铝型材质量轻、成本低,同时便于制造和组装固定架。
为了让小臂护具固定架绕肘关节转动,大臂护具固定架和小臂护具固定架之间在两侧面各用一套轴承座、轴承及相配的轴连接装配。由于两侧是轴承连接,所以转动过程中摩擦力非常小可以忽略不计,避免了能量损耗。
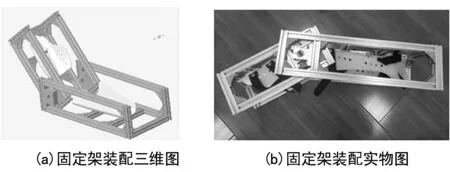
图4 上肢康复机器人大臂护具固定架、小臂护具固定架装配结构
2.3 护具固定架、力矩传感器、伺服电机之间的安装设计
为了能让伺服电机带动小臂护具固定架绕肘关节轴承转动对上肢实施康复锻炼,并不断实时测量肘关节上的力矩变化值,因此要在上肢康复机器人肘关节处合理安装力矩传感器和伺服电机,见图5。电机安装座1起到支撑伺服电机3的作用,并固定在大臂护具固定架2上,在电机安装座1外侧安装上伺服电机3并用螺栓固定。力矩传感器4一端面通过联轴器与伺服电机3的转子相连,另一端面则由螺栓固定在小臂护具固定架5的侧面上;并且确保伺服电机转子轴线、力矩传感器轴线、肘关节轴承轴线共线,目的是为了保证伺服电机运转时能够经力矩传感器直接带动小臂护具固定架绕肘关节轴承转动,同时力矩传感器能实时监测并反馈力矩数据信号给控制器。为了保证控制和运行的精度,经多方面比较后,最后选择埃斯顿自动化公司研制的EMJ-04A型伺服电机和ProNET-E-04A型伺服驱动器,选择蚌埠大洋传感系统工程有限公司研制的力矩传感器及对应的变送器,见图6。
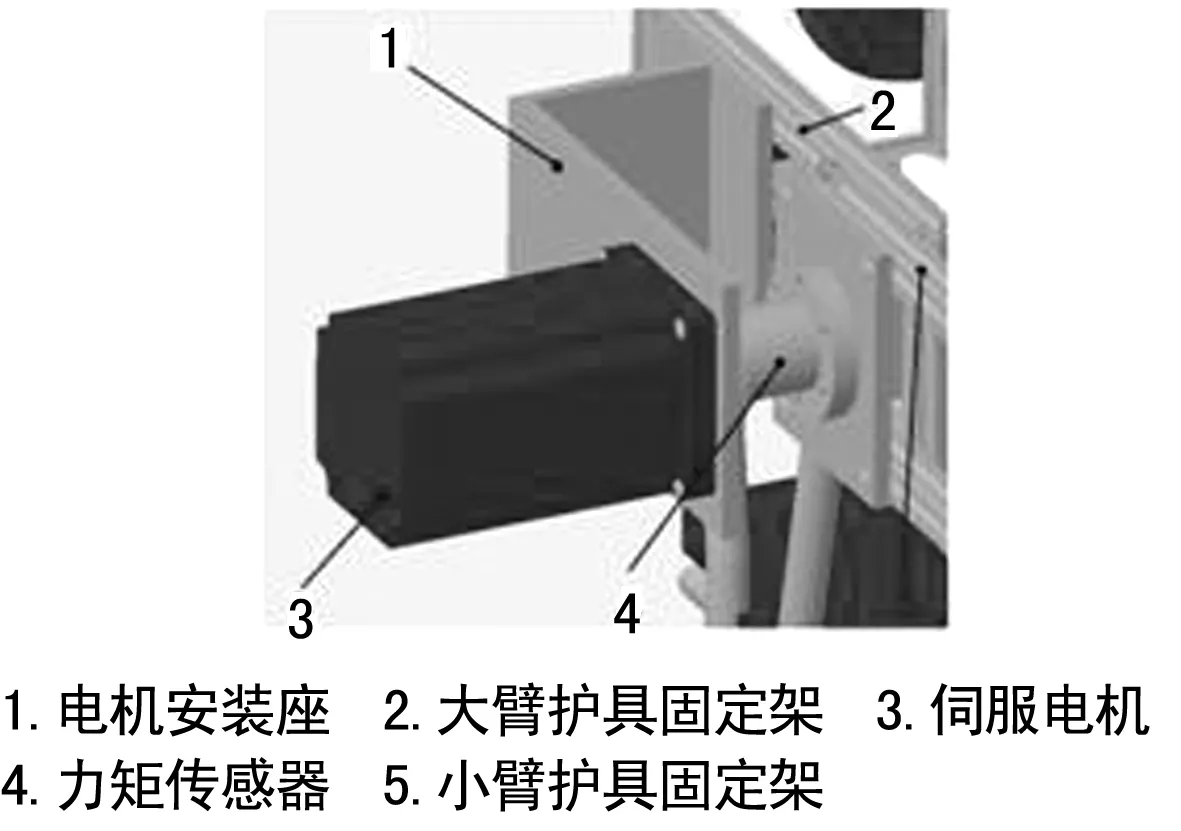
图5 传感器、伺服电机和固定架装配三维图
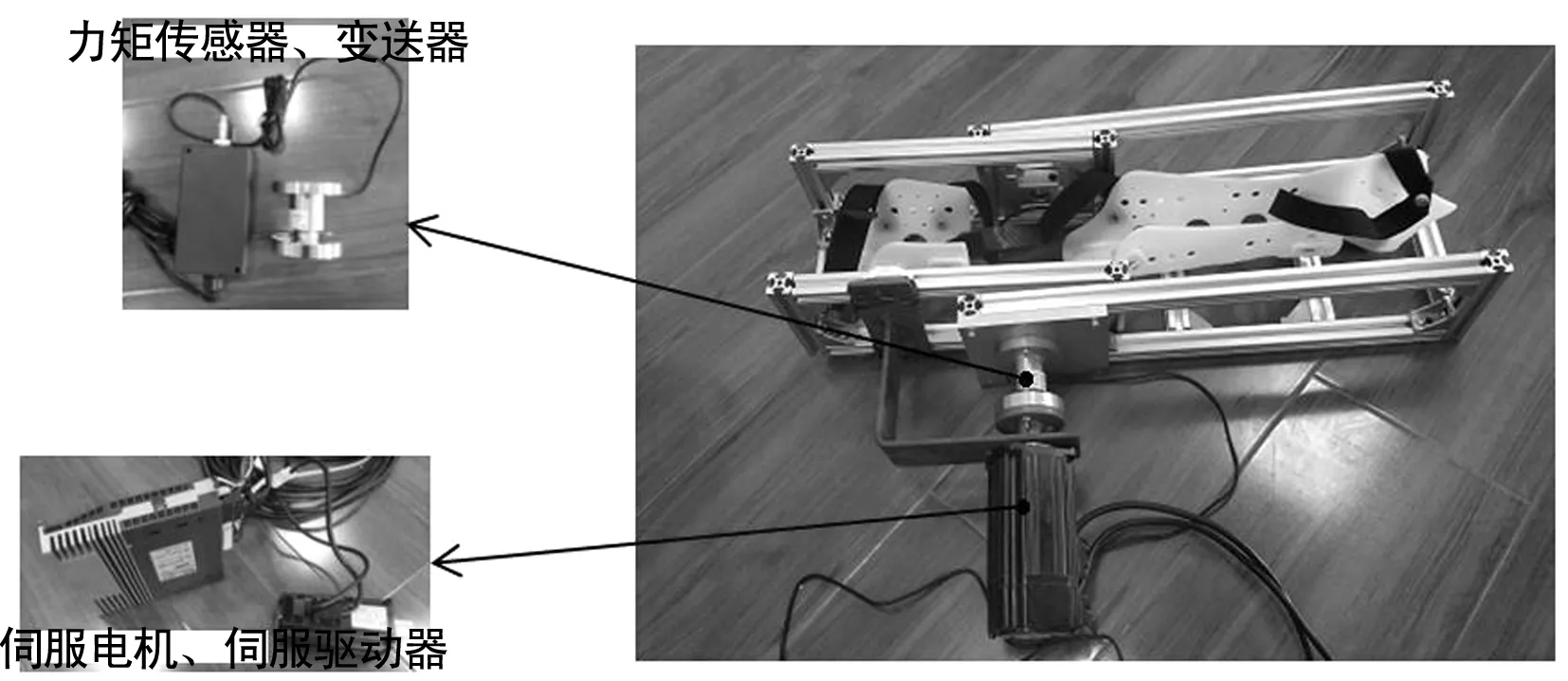
图6 传感器、伺服电机和固定架装配实物图
2.4 运动控制器选用
运动控制器是实现微力矩反馈自适应耦合运动控制的关键部件,要能够获得精确的力矩传感器的实时力矩信号,并根据力矩的实时变化情况发送相应的指令信号给伺服电机对电机进行精确实时控制。因此选用埃斯顿自动化公司研制的ESMotion-NGQ控制器作为该上肢康复机器人控制器,该控制器可进行复杂运动多功能控制,基于EtherCAT总线、CANopen总线集成,具有VTB编程环境,见实物图7。

图7 运动控制器
3 上肢康复机器人运动学和动力学分析
对上肢康复机器人进行运动学和动力学分析研究是机器人设计的理论基础,对机器人设计开发起到了指引作用。运动学分析是利用大臂、小臂的运动几何关系推导得出运动学数学模型;动力学分析是通过拉格朗日法建立了动力学数学模型。上肢康复机器人在实施康复训练时,其小臂护具固定架绕肘关节往复摆动,以此建立结构模型,见图8。
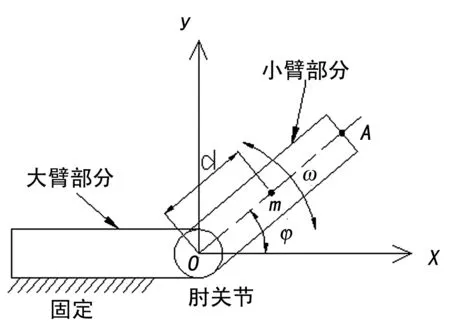
图8 上肢康复机器人结构模型
3.1 运动学分析
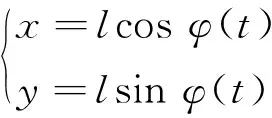
小臂由水平位置绕肘关节逆时针旋转,运动过程中与水平位置的夹角为φ(t),小臂护具固定架长度为l,φ(t)的范围为0°~90°。所以,康复机器人运行时,随着时间t变化,小臂护具固定架顶端A点的运动方程为:
(1)
对(1)式进行求导,即可得出A点的速度为:
(2)
对(2)式进行求导,即可得出A点的加速度为:
(3)
3.2 动力学分析
动力学分析,建立物体运动和受力之间的的数学关系式,为康复机器人控制方面研究提供理论基础。研究机器人动力学的方法有很多,当前的主流有牛顿欧拉法、高斯法、拉格朗日法、凯恩法以及旋量对偶法等[14-15],其中拉格朗日法应用最为广泛。这得益于拉格朗日法简单适用,因为拉格朗日法是基于系统动能和势能的算法,使用它解决动力学问题只需要速度及位置信息就可以,因此本次动力学分析选用了拉格朗日法。
根据拉格朗日函数定义,可得:
L=Ek-Ep
(4)
式中:Ek为整个系统的动能,Ep为整个系统的势能。
设上肢康复机器人小臂质量为m1,患者人体的小臂质量为m2,整个小臂系统的总质量为m,可得:
m=m1+m2
(5)
上肢康复机器人小臂的长度为l,机器人小臂的质心到肘关节的距离约为小臂长度l的一半。设D为患者人体小臂质心到肘关节的距离,d为整个小臂系统的质心到肘关节的距离,可得:
(6)
设整个小臂系统绕肘关节进行定轴转动的转动惯量为Jo,患者人体小臂长度为ly,可得:
(7)
由拉格朗日法,需分别求出整个小臂系统的动能和势能,即:
(8)
Ep=mgdsinφ(t)
(9)
再将式(8)、(9)代入式(4),可得整个小臂系统的拉格朗日函数,即:
mgdsinφ(t)
(10)

(11)
(12)
因此,可得肘关节上的力矩M:
(13)
式中:Md为伺服电机提供的实时转矩;My为患者人体小臂对肘关节产生的实时微力矩。
4 控制策略与实验研究
4.1 微力矩反馈自适应耦合运动控制策略
此次设计的上肢康复机器人的控制策略是在上肢康复训练过程中总是保持小臂以恒定的角速度ω绕肘关节转动,则φ(t)=ωt,其中ω的值可根据患者康复情况自主设置改变。根据实际情况,上肢康复机器人带动患者上肢康复训练时存在三种可能,并制定相应的控制策略:①患者严重情况下,上肢完全无肌力,这时完全由伺服电机驱动小臂护具固定架并带动患者小臂进行运动;②患者恢复了一定的肌力情况下,利用自己的主动运动意识,发挥已恢复的运动能力使小臂主动绕肘关节往运动方向运动,力矩传感器上的力矩会瞬间减小,此时力矩传感器便会向控制器发出信号,控制器立刻向伺服电机发出指令减小伺服电机的输出转矩;③患者陷入疲惫肌力不足情况下,此时患者停止自己主动运动,力矩传感器上的力矩会瞬间增大,此时力矩传感器会向控制器发出信号,控制器立刻向伺服电机发出指令增大伺服电机的输出转矩。由不断的微力矩反馈实时自适应耦合运动控制调整伺服电机的输出转矩大小来保证肘关节上力矩平衡,保持了患者小臂的匀速摆动。将患者自身的主动运动意识产生的微力矩参与到整个康复训练过程中,充分发挥了患者的已恢复的运动能力进行微力矩反馈自适应耦合运动控制,这种运动控制方法进一步提高了上肢的康复效果。图9为上肢康复机器人运行时的肘关节上所受力矩情况,其中Ma、Mb、Mc分别代表伺服电机转矩、整个小臂系统重力产生的力矩、患者人体主动运动意识产生的微力矩。整个过程控制策略的流程见图10。
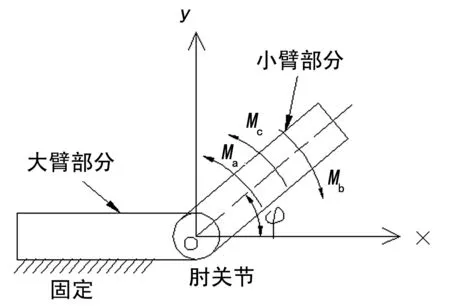
图9 上肢康复机器人肘关节所受力矩情况
在上肢康复机器人正常工作阶段,伺服电机需要提供的转矩为:
Ma(t1)=Mb(t1)=mgdcosφ(t1)=mgdcos(ωt1)
(14)
式(14)中m为整个小臂系统总质量,由式(5)可得,d为整个小臂系统质心到肘关节的距离,由式(6)可得。
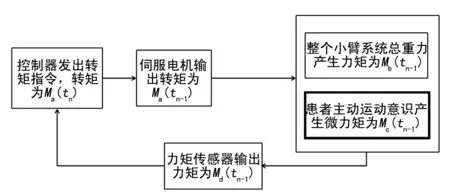
图10 上肢康复机器人控制策略流程图
此时伺服电机的转矩与整个小臂系统总重力对肘关节产生的力矩正好相等,同时力矩传感器上产生的力矩就是整个小臂系统总重力对肘关节产生的力矩。如果患者在这时主动运动意识产生微力矩Mc(t1),那么此时力矩传感器上的力矩则为Md(t1),则可得:
Mc(t1)=Ma(t1)-Md(t1)=mgdcos (ωt1)-
Md(t1)
(15)
紧接着,为了达到保持整个小臂系统匀速转动、肘关节上力矩平衡,控制器立刻向伺服电机发出指令,控制电机提供转矩为:
Ma(t2)=mgdcos (ωt2)-Mc(t1)
=mgdcos(ωt2)-mgdcos (ωt1)+
Md(t1)
(16)
在康复训练过程中,如果患者再次利用主动运动意识产生微力矩为Mc(t2),这时力矩传感器上的力矩变为Md(t2),则可得:
Mc(t2)=Ma(t2)-Md(t2)
(17)
同样的,为了达到保持整个小臂系统匀速转动、肘关节上力矩平衡,控制器立刻向伺服电机发出指令,控制电机提供转矩为:
Ma(t3)=mgdcos (ωt3)-Mc(t2)
=mgdcos(ωt3)-Ma(t2)+Md(t2)
(18)
因此,可推得在t4、t5、t6、t7……tn时刻控制器控制伺服电机提供的转矩分别为:
Ma(t4)=mgdcos (ωt4)-Mc(t3)
=mgdcos (ωt4)-Ma(t3)+Md(t3)
Ma(t5)=mgdcos (ωt5)-Mc(t4)
=mgdcos (ωt5)-Ma(t4)+Md(t4)
Ma(t6)=mgdcos (ωt6)-Mc(t5)
=mgdcos (ωt6)-Ma(t5)+Md(t5)
…
…
…
Ma(tn)=mgdcos (ωtn)-Mc(tn-1)
=mgdcos (ωtn)-Ma(tn-1)+Md(tn-1)
(19)
使用上述控制策略就可在康复训练过程中不断根据患者小臂的实时微力矩反馈自适应耦合控制上肢康复机器人带动患者小臂进行康复训练,这样的微力矩反馈自适应耦合运动控制方法将真正实现人机交互,让患者参与到自己的康复训练中,起到了更好的康复训练的效果。
4.2 实验研究
设计上肢康复机器人微力矩反馈自适应耦合运动控制系统,利用上述设计的运动控制策略编写微力矩反馈自适应耦合运动控制系统的控制软件,并进行实验研究,通过实验进行验证。选择一名净身高 1 764 mm、体重 66 kg、小臂长度254 mm的男性作为实验对象。实验时,取小臂部分由水平位置逆时针旋转,电机带动小臂部分匀速转动,小臂部分与水平方向之间的夹角为φ,φ随着时间t而改变。φ的范围为0°~90°。实验期间取19个不同时刻相应的夹角(分别是0°、5°、10°、15°、20°、25°、30°、35°、40°、45°、50°、55°、60°、65°、70°、75°、80°、85°、90°)。实验过程中,在这19个不同夹角时,康复机器人上参与实验的人员小臂会随机主动产生微力矩Mc(在开始与结束时即0°、90°没有主动产生微力矩);同时,在这19个不同夹角时由于微力矩而造成伺服电机驱动转矩发生瞬间改变,变化量为Ma(变)。最后可得微力矩及因微力矩造成伺服电机驱动转矩瞬间变化的曲线图,见图11。
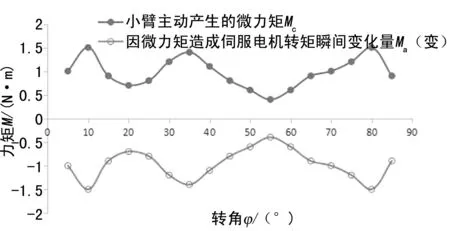
图11 上肢康复机器人微力矩、电机转矩变化曲线图
从图11可以发现,当在不同夹角处小臂产生的微力矩Mc时,相应的因微力矩造成伺服电机驱动转矩瞬间就会变化,即变小,变化值为Ma(变),Mc与Ma(变)的数值大小近似相等,正负相反,同一夹角处Mc与Ma(变)之和近似为0。通过实验研究验证了上肢康复机器人微力矩反馈自适应耦合运动控制策略的可行性和正确性。
5 结 论
文中研制了一种微力矩反馈自适应耦合运动控制上肢康复机器人,进行了结构设计、运动学和动力学分析、微力矩反馈自适应耦合运动控制策略研究、实验研究。所研制的上肢康复机器人有以下3个优点:①机器人结构体巧妙、简单,并且机器人的小臂护具、大臂护具采用了小密度的轻质材料聚乙烯(PE),两护具上加工有多数小透气孔便于患者大臂和小臂透气舒适、不闷热;②为了提高运动控制精度和执行精度选用了高精度的控制器及高精度的伺服系统;③通过患者的主动运动意识,发挥患者已恢复的运动能力产生微力矩,实时反馈给运动控制器进行修正并进行自适应耦合运动控制,实现人机交互,让患者参与到自己的康复训练中,起到了更好的康复训练的效果。