基于机载式激光雷达的偏航校正功率曲线优化探讨
2021-11-18章立栋
章立栋
文大光电科技(上海)有限公司 上海 200131
引言
大自然的风向实时变化的,风力发电机属于大惯性设备以及偏航对风速度的限制,控制系统并不要求实时跟随风向变化,只需要保持风机偏航误差在设定范围内运行即可,因此本文是讨论稳态运行的偏航误差。偏航误差引起一系列的问题,比如功率曲线不达标,尾流的损失,系统过载等等。文中采用机载式多普勒激光雷达检测偏航误差,通过交替校正的方式,评估偏航误差对功率曲线的影响,减少评估计算的不确定性。
1 偏航误差产生的原因和功率损失
机械式或者超声波式风向仪都安装的风力发电机机舱尾部的上方,受到风轮顺时针方向旋转的扰动,测量的风向与前方实际风向存在偏差;其次在安装过程中,非常容易滑动风向标的零刻度线;再次,风机轮毂罩,机舱罩以及微观选址对来流的影响。因此传统的风向仪不能正确测量风机偏航误差。
稳态风速下的风机功率P计算如公式(1)所示,其中ρ空气密度,A风轮面积,V稳态风速,C p风能利用系数。其中风速V方向正对风轮平面轴线,夹角为0度。

2 测量原理
机载式多普勒激光测风雷达安装在机舱罩顶部的后方,测量风轮前方气溶胶微粒相对于激光束方向的运动速度,然后通过矢量合成风速和风向,图1是以丹麦Windar Photonics A/S公司的2光束产品WindEYE[2]为例介绍偏航误差的测量原理。
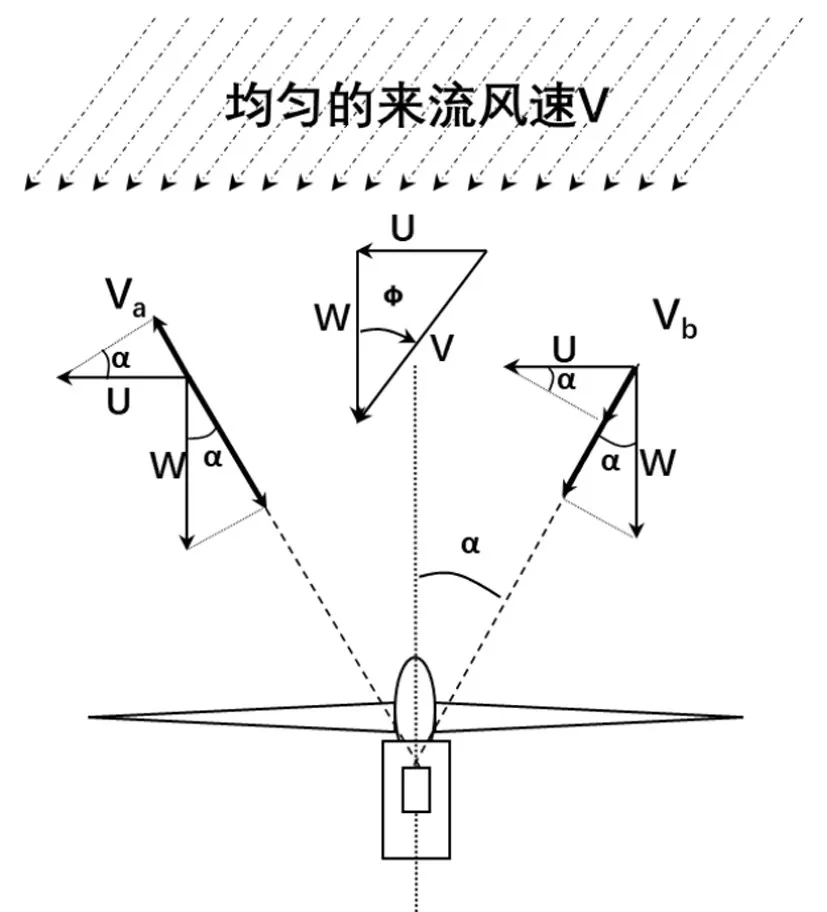
图1 WindEYE风速风向重构
设定风轮前方是均匀的来流风速V,与风轮轴线的夹角为Φ,可以分解为切向风速U和轴向风速W,光束半开角为α=30°,左右光束的测量风速分别为V a和V b,以顺时针方向为风向的正方向,来流风速V方向与机舱的夹角为Φ>0,则

通过公式(2),(3)可以求出轴向和切向风速分量,并重构来流风速和风向:

3 校正方法
偏航误差校正可以分为静态和动态校正。静态校正是用激光雷达检测到的偏航误差θ去修改主控系统为风向标初始安装预留的θoffset参数,让θoffset=θ实现。校正完毕后拆除激光雷达,挪到下一台风机再使用,提高激光雷达的使用效率。动态校正是始终需要雷达集成到风机偏航控制系统中,实现对风控制。
由于激光雷达测风设备价格较高,不同风机存在的偏航误差情况也各不相同,采用的校正方法有所不同,具体情况处理如下:
情况1:平均值小,离散性大,采用动态校正。
情况2:平均值和离散性都大,采用动态校正,静态校正效果不够好。
情况3:平均值大,离散性小,采用静态校正。
情况4:平均值和离散性都小,无需校正。
针对风电场业主无权限修改偏航控制逻辑,Wind EYE产品[2]的Wind TIMIZER模块可以无缝接入风机主控系统,自动切换输入主控系统的信号为风速风向仪或激光雷达测风信号,并通过内部算法优化偏航误差的平均值和离散性。
4 交替校正
国内几乎所有风电场业主都要求根据SCADA系统记录的功率曲线评估偏航误差校正后的效果。按照IEC61400-12-2标准[3]进行功率曲线验证,其不确定性超过15%[1],采用前测量后校正的方式验证功率曲线优化效果,结果容易淹没在15%的不确定性误差范围内。为尽可能减少测量不确定性,根据Van Der Hoven风速功率谱特性[4],风速10分钟至2小时期间的频谱基本是水平分布,所以采用间隔一个小时交替校正的方法进行验证,图2的 Wind TIMIZER模块相当于一个软件开关,可自动切换。

图2 Wind TIMIZER模块接线示意图
具体交替校正项目数据处理过程如下:
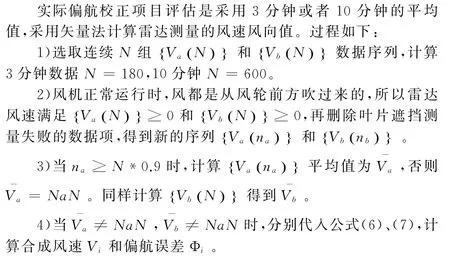
(1)按照本文第2节的方法计算10min的平均数据,数据项包括时间戳,雷达风速,偏航误差,校正状态。
(2)与SCADA数据进行时间同步,删除风机停机和尾流扇区的数据项。
(3)删除每次切换后的第一个10min数据。
(4)由校正状态将数据分为检测组和校正组。
(5)根据IEC61400-12-2标准[3]的Bin方法,计算检测和校正组功率曲线 {VBin,P Bin} 。
(6)接合测试风电场的威布尔分布 {PDF Bin},按照公式(8)计算年发电量AEP,公式(9)计算校正后的年发电量提升效果η。

V cut-in切入风速,V cut-out切出风速,P Bin,i第i个V Bin风速对应的功率,PDF Bin,i第i个V Bin风速对应的威布尔分布概率。

AEP校正和AEP检测分别是校正和检测组的年发电量。
5 实际案例
文大光电科技(上海)有限公司在江苏国家电投新能源公司下属的7个风电场开展为期一年的偏航校正业务,其中包括3种地理环境,3个厂家的6种型号的风机产品,安装14台Wind EYE激光雷达设备,通过Wind TIMIZER模块进行动态偏航校正。2020年9月至12月,雷达安装,调试,收集数据。2021年1月至8月,开启间隔一个小时的交替校正,验证功率曲线优化效果。2021年9月开始,激活全时段动态校正功能。
风机按照额定功率与风轮直径分类,测试结果如表1所示,包括基于雷达风速和风速仪风速进行年发电量AEP的评估结果。

表1 交替偏航误差动态校正结果数据对比
(*)7#和9#风机为本项目前就完成静态偏航校正。
根据表1可以得出如下结论:
a)所有风机的平均偏航误差由校正前的5.6度降为1.0度,离散性也由3.3度降为2.7度。Wind TIMIZER模块确实在没有修改主控偏航控制逻辑或者参数的前提下校正风机的偏航误差。
b)若以3度偏航误差角为界,超过60%的风机需要校正。若包括两台事先做过静态校正的风机,则超过70%。
c)同型号风机的平均偏航误差并不一样。
d)陆上风场的不同风机的平均偏航误差离散性很大。
e)海上风机动态校正后离散性明显降低,年发电量提升效果明显。
f)序号5~12风机属于同一厂家,初始偏航误差和离散性各不相同,校正后,偏航误差都得到优化,但是离散性都没有明显变化。原因是这4种机组采用相同的偏航控制策略。
g)序号13,14机组与序号5~12机组不是同厂家的机型产品,但是校正后偏航离散性结果类似,故推断其偏航控制策略也是相近的。
h)若动态校正没有使其离散性得到明显改善,则只需要静态校正即可。
i)按照公式(8)(9)分别计算基于雷达与风速仪风速的年发电量提升百分比,差异很大。原因详见本文6.1节内容。
6 问题讨论
6.1 机舱风速仪风速测量变化 14台测试风机动态偏航校正前后,机舱风速仪的测量值与雷达风速测量值之间的关系都发生不同程度的变化。按照最小二乘法拟合机舱传递函数y=ax+b,x为机舱风速仪测量值,y为雷达测量值,校正后所有测试风机的斜率a都变大。尽管机型和安装地点不同,但趋势一致,偏航误差越大,校正后机舱风速仪风速变小就越多。
由于激光雷达在偏航校正前后,测量的都是风轮前方的风速,而机舱风速仪测量值发生变化,故建议采用雷达测量风速评估偏航校正前后的功率曲线优化和发电量提升,减少不确定性。
6.2 偏航误差与年发电量关系 图3是14台测试风机动态偏航校正后年发电量提升比例与不同的余弦关系,在稳态偏航误差绝对值小于12度的时候,不管采用雷达测量风速,还是采用风速仪风速进行年发电量提升评估,其结果都是大于[1-cos(θ)3]关系。在实际项目中,检测到稳态偏航误差后,可以直接采用 [1-cos(θ)3]关系粗略估计潜在的年发电量提升,相比Risø-R-1330(EN)[1]报告中指出的 [1-(cosθ)2]提升关系,采用Wind TIMIZER动态偏航校正的效果更好。

图3 动态偏航误差与年发电量提升关系
7 总结
激光雷达检测风力发电机的偏航误差是真实存在的;通过动态偏航校正,能够优化风机的偏航误差值;同时优化功率曲线,提高年发电量;采用交替校正的方式,所有测试风机都得到较好的评估结果。
不同风机进行动态偏航校正,其偏航离散性的改变有不同的表现,需要进一步协同风机主控策略厂家,进行深入探讨。
