虚拟轨道列车循迹控制优化模型与仿真研究
2021-11-17曾厚铭贾尚帅
曾厚铭,车 超,解 静,贾尚帅
(1. 西南交通大学牵引动力国家重点实验室,四川 成都 610031;2. 中车长春轨道客车股份有限公司基础研发部,吉林 长春 130062;3. 中国人民解放军96901部队24分队,北京 100094;4. 中车唐山机车车辆有限公司技术研究中心,河北 唐山 064000)
1 引言
伴随城市化进程的加快,公共交通运输越来越难以满足人们日益增长的出行需求。虽然兴建地铁、轻轨、空轨等可以有效缓解公共交通压力,但是其建设周期长、成本高。另一方面,国家新近出台的国办发[2018]52号文件进一步规范了城市轨道交通修建,大多城市尚不满足相关修建要求。在这种情况下,研发具备较高运载能力,可以在既有道路上行驶的新型城市轨道交通运输方式势在必行。虚拟轨道列车[1,2]就是一种符合这些特点和要求的新型城市交通运输方式。
虚拟轨道列车是智能轨道快运系统的运载工具[3],是通过胶轮承载、以地面虚拟轨道为导向运行的道路列车,其轨道非传统钢轨而是在道路上铺设感应标识形成的虚拟轨道,是一种地面自导向新型城市轨道交通工具。虚拟轨道列车的循迹控制是通过车载感知系统获取车体与虚拟轨道之间的相对位置和姿态,结合车体运动状态和周边运行环境等因素生成控制决策,旨在实现循迹行驶和协同转向,是虚拟轨道列车的一项关键技术。德国弗劳恩霍夫交通和基础设施系统研究所针对实现循迹行驶和最小化横向铰接力这两个目标,提出了一种三节编组车辆除首车外所有后车(以下简称后车)的横向控制模型[4,5]。车辆在该模型的控制下,稳态时能实现良好的循迹效果,但在进出圆形轨道时的循迹偏差较大,且越靠后的车辆调整时间和超调量都越大,说明该模型对于轨道曲率变化时的循迹效果不佳。因此本文在其基础上提出一种优化模型,对原模型在轨道曲率变化时的循迹效果进行改善;基于虚拟样机分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)及其二次开发技术建立三节编组的虚拟样机模型并实现循迹控制仿真,验证所提出的优化模型的控制效果。
2 循迹控制优化模型
原模型在轨道曲率变化处,如由直线进入圆形轨道,当首车开始入弯时,后车还处在直线轨道上,但此时后车后轴已开始转向,虽然使用一阶惯性环节进行迟滞,但循迹效果不佳,究其原因是一阶惯性环节的响应与理想转角变化不符。因此在原模型的基础上,将原模型的一阶惯性环节改为增设多个传递环节,使其响应尽可能逼近理想转角。
2.1 后车后轴理想转角计算
当跟踪点设置在铰接处时,严格循迹的状态下各后车的运动状态都完全相同,后轴的理想转角变化也相同,循迹控制容易实现。因此,循迹优化模型的跟踪点设置在铰接处。
以第i节车为例,将其简化为如图1所示的几何模型,车辆尺寸参数L,lF,lR,l均为已知,目标轨道半径R可由首车运动状态计算得到。从第i节车前铰Gi-1抵达直线与圆的交界处时,认为其开始入弯,图1中的粗虚线就表示该时刻的车辆状态。根据跟踪点在目标轨道上运动且速度方向与目标轨道相切的性质,得到该车速度瞬心Mi,再根据几何关系,求解后轴A2i的理想转角。

图1 后轴理想转角计算原理图
设从第i节车开始入弯后,后铰Gi移动的距离为s′(0≤s′≤L),先求Gi与目标轨道圆心O间的距离

(1)
在△Gi-1OGi中,由余弦定理求解ξi-1和βi-1

(2)

(3)
从而,求得Mi与Gi-1间距

(4)
在△Gi-1MiA2i中,由余弦定理可得A2i轴的转动半径

(5)
最后,在该位置时A2i轴的理想转角

(6)
为验证上述推导结果,在ADAMS软件中建立了一个简化模型,将车辆简化为杆件,并将跟踪点使用点线副强制约束在预设轨道中线上,给予模型一个初速度,移除重力和摩擦等因素进行仿真,输出仿真结果并计算后轴位置处的速度与车体纵轴线间的夹角,所得夹角即为跟踪点严格循迹时的后轴转角。理论推导和简化模型仿真得到的基于路程的后轴理想转角对比如图2所示,结果基本一致。
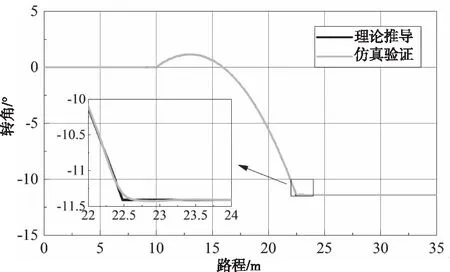
图2 后轴理想转角理论推导及仿真验证对比
2.2 后车后轴转角控制模型
将原模型的一阶惯性环节改为三个由一阶、微分、延迟、比例环节组成的传递环节并联,其传递函数[6]分别为

(7)
式中,s为复变数,X(s)为输入量的拉氏变换,Y1(s),Y2(s),Y3(s)分别为三个传递环节输出量的拉氏变换,T1,T2,T3,T4,T5,T6,K1,K2,K3,τ1,τ2为传递环节的参数。
以第一个传递环节为例,进行拉式逆变换,可得微分方程

(8)
式中,x(t)、y1(t)分别表示输入信号和该传递环节的响应信号。
考虑到实际应用,需使用离散形式。同时考虑到车辆的运行速度会发生变化,后轴转角基于时间迟滞则不能满足循迹精度的要求,因此将后轴转角基于路程迟滞,将时间常数T1、T2写为

(9)
式中,S1、S2为路程常数,vk表示在第k步时的速度。
此时时间常数T1、T2变为与当前速度相关的变参数,另外用路程延迟S′1代替表示时间延迟的τ1,则式(8)可写为

(10)
式中,xk、y1k为x(t)、y1(t)的离散形式,分别表示第k步时的输入信号和该传递环节的响应信号,k1表示第k步的S′1路程前的步数。
设第k步时车辆行进的总路程

(11)
式中,Δt为时间步长。
由于Sk是单增的,则k1可由式(12)确定。
Sk1-1≤Sk-S′1≤Sk1
(12)

(13)

(14)
用同样的方法可得其余两个环节的响应,再将三个响应叠加即得最终响应。
为使所得响应逼近理想转角,需计算参数X=[S1,S2,S3,S4,S5,S6,K1,K2,K3,S′1,S′2]的最优解。该问题的数学模型为
s.t.lb≤X≤ub
(15)
式中,nk为总步数,fk为第k步时的理想转角,ub和lb分别为解空间的上限和下限。
利用MATLAB中的GA函数,即通过模拟自然进化过程搜索最优解的遗传算法对上述问题进行求解,得到参数X的最优解,从而计算后轴转角基于路程的响应,该响应与理论推导得出的理想转角对比如图3所示。

图3 后轴理想转角与响应曲线对比
3 仿真平台
3.1 虚拟样机模型
根据文献[5]研究的符合虚拟轨道列车特点的双铰接道路客车参数,本文在ADAMS软件的View模块中建立了如图4所示的三节编组虚拟轨道列车虚拟样机模型[7]。关于该模型相关内容的说明见表1。
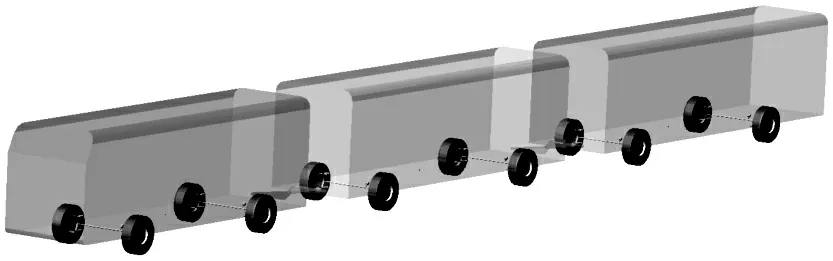
图4 虚拟轨道列车虚拟样机模型
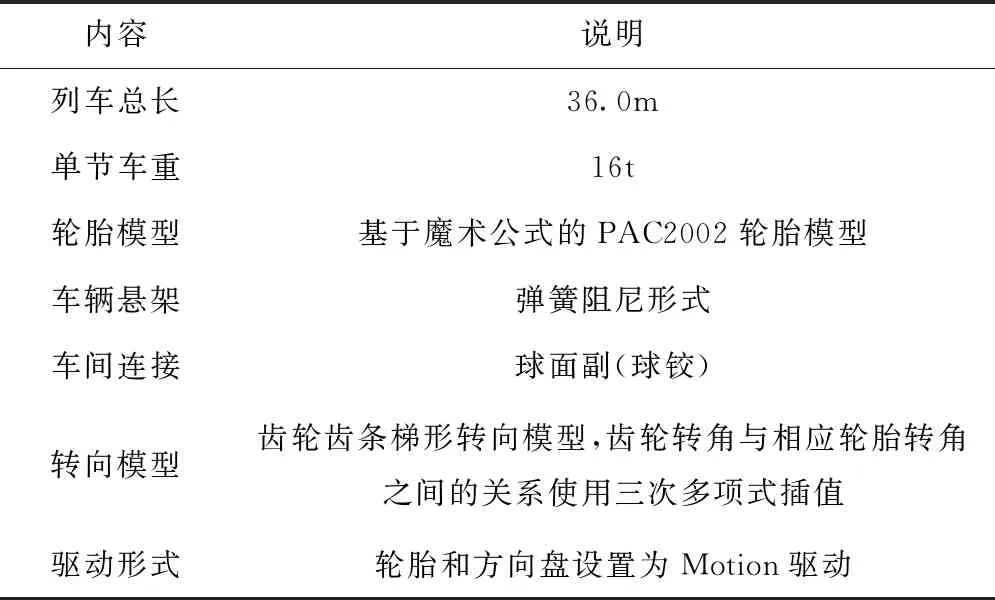
表1 虚拟轨道列车虚拟样机模型说明
3.2 ADAMS二次开发技术
ADAMS本身的控制模块和函数表达式都不足以实现本文复杂的循迹控制,因此,需要使用更具有通用性和灵活性的二次开发技术。用户自定义函数[8]作为一种ADAMS二次开发技术的方式,能够按照用户的需求,利用通用程序设计语言(FORTRAN或C)量身设计ADAMS/View不能提供的函数并与其连接,这种方法不会折损ADAMS/View的任何功效,对仿真速度也没有影响。
ADAMS用户自定义函数在本文中的应用流程如图5所示。首先使用C语言将运行工况、循迹控制模型、目标轨道都编写入控制代码中。随后使用C++编译器将控制代码文件编译成ADAMS可以直接作为求解库调用的动态链接库(Dynamic Link Library,简称DLL)文件,被ADAMS中每个作为执行机构的Motion调用。在仿真时,用户自定义函数从虚拟样机模型中获取需要测量的信息,进而求解出需执行机构执行的命令,在虚拟样机模型中作动,最终得到列车响应。
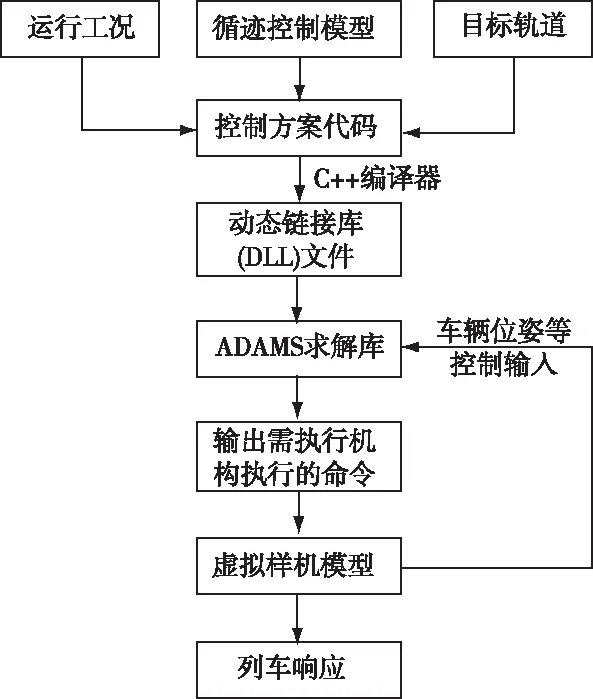
图5 ADAMS自定义函数应用流程
4 仿真结果
由于实际道路的道路中线通常由直线和圆弧组成,因此,本文使用的“Ω”形轨道可以模拟列车典型的运行工况。仿真时,列车一开始处在直线轨道上,随后沿半径为17.5米的圆形轨道行驶,转过360°后列车再次直行。除了稳态行驶之外,此工况还包括进出圆形轨道的瞬态,这也是该优化模型重点考虑的工况。
该优化模型旨在通过控制后车后轴转角在转向行为改变时的变化过程,从而改善循迹效果。仿真结果中的后车后轴内轮转角变化曲线如图6所示,结合第2章内容可以看出,这一变化过程符合本文的预期。

图6 后车后轴内轮转角
仿真结果的循迹效果如图7所示。由于本文将跟踪点设置在铰接处(尾车设置在车尾处),而首车单独进行控制,非本文的研究内容,且首车的运动几乎不受后车的影响,则认为首车循迹效果良好,因此图7只给出作为参考的预设虚拟轨道中线,以及表征后车循迹效果的后铰和车尾处的运动轨迹和横向偏差。

图7 跟踪点的循迹效果
根据图7(a)显示的结果,优化后跟踪点运动轨迹与预设虚拟轨道中线的重合度高。图7(b)显示,列车在稳态时循迹效果依然很好,并且在进出圆形轨道的瞬变过程,该模型也有着显著的优化效果:最大横向偏差小于0.1m,相较于原模型的小于1.0m降低了一个数量级。
图8显示了前后铰接的横向作用力。由于对于后车前轴的转角控制仍然采用德国弗劳恩霍夫实验室的模型。即以相邻两车在铰接处的速度方向相等为原则,尽量减小影响循迹行驶的横向铰接力。因此本文的结果与原模型一致,产生的最大横向铰接力小于4kN,不会导致轮胎侧向力过大而恶化循迹效果,且铰接处能承受这种大小的持续横向载荷。

图8 前后铰接横向作用力
5 结语
对德国弗劳恩霍夫交通和基础设施系统研究所提出的一种多节后车横向循迹控制模型进行了研究,该模型使得车辆在稳态时能实现良好的循迹效果,但在轨道曲率变化时的循迹效果不佳。因此本文在其基础上提出了一种优化模型,将跟踪点设置在铰接处,计算车辆进出圆形轨道的后车后轴理想转角,将原模型的一阶惯性环节替换为三个组合环节,传递环节参数通过遗传算法(MATLAB的GA函数)求得最优解。根据德国弗劳恩霍夫交通和基础设施系统研究所研究的符合虚拟轨道列车特点的双铰接道路客车参数,利用ADAMS软件建立了三节编组的虚拟轨道列车虚拟样机模型,并通过ADAMS二次开发技术将循迹控制模型应用在仿真验证中。仿真结果表明,该优化模型有明显的优化效果,最大横向偏差小于0.1m,相较于原模型的小于1.0m降低了一个数量级。同时,由于仍然对后车前轴采用最小化横向铰接力的控制模型,最大横向铰接力足够小,不会对循迹效果产生影响。