基于电磁效应的球壳型磁流体仿真分析
2021-11-17刘超镇顾友林王石刚
傅 超,刘超镇,顾友林,王石刚
(1. 上海交通大学机械与动力工程学院,上海 200240;2. 上海航天控制技术研究所,上海 201109)
1 引言
卫星的姿态控制性能是决定卫星应用功能的重要因素,因而对卫星的控制精度和稳定性指标的要求越来越高。目前,卫星姿态控制器主要包括飞轮、反作用推进器和磁力矩器等,其中飞轮应用最为广泛,根据角动量守恒原理实现卫星姿态调整。然而,现有的姿态控制器在使用上存在一定的局限性。飞轮机构的轴承随着运行时间的增加,机械磨损加剧,导致卫星姿态控制精度和可靠性大幅度下降,且飞轮结构较复杂,尺寸和质量上有所局限。因此,有研究者开始考虑采用流体环进行角动量交换来实现卫星姿态控制。由于无高速运动的机械零部件,结构相对简单,流体环具有较高的可靠性。
流体环用于卫星调姿,最早可以追溯到1988年NASA的Ronald Houston提出的流体动量控制器概念[1]。在NASA开创性地提出流体动量环以来,后续研究主要分为两类,一类为以水为流体介质,利用机械泵驱动的流体环调姿;另一类为以液态金属为流体介质,利用电、磁驱动的磁流体环调姿。采用机械泵驱动流体环中的流体运动的方案,因机械泵仍然存在高速运动的机械零部件,故无法从根本上解决因机械零部件高速运动引起的磨损、振动及可靠性等问题。磁流体环调姿方面,Varatharajoo R S等研究了磁流体的电磁驱动和热电驱动两种方案,提出了综合姿态控制和热量控制的综合系统,但其理论模型进行了高度简化[2]。KD Kumar 对三正交磁流体环设计了控制系统,并仿真分析了卫星的高姿态扰动扭矩和间歇性驱动器故障的姿态稳定问题[3]。Nobari 等分析了一种新的混合驱动系统流体环,经仿真分析验证它有良好的容错能力[4]。2014年,Daniel Noack等研制了小型磁流体环调姿的原理性验证装置,用一种共晶合金作为介质,采用传导式电磁驱动,并进行了一系列测试,证明其性能在扭矩和功耗上优于类似尺寸飞轮机构[5]。
无论是飞轮还是流体环,要对卫星进行精确的三轴稳定姿态控制需要安装至少三套机构,占用大量宝贵空间。此外对于任意调姿方向要求需要将调整动量分解到各个机构,动量利用率较低。本文提出了一种球壳型磁流体姿态控制器,根据调姿要求,只需将电磁驱动器调整到某一矢量位置即可控制金属液体的运动。因此,一个球壳型结构即可实现三个流体环的功能,实现三轴姿态控制。球壳中的磁场由电磁感应器通以三相交流电来实现。在旋转磁场作用下,金属液体感应出电流,电流和磁场共同作用产生洛伦兹力以驱动流体运动。金属液体在球壳中的流动取决于旋转磁场的性质,旋转磁场又取决于提供给电磁感应器的电流强度和频率,因此有必要分析电流对流体流动、角动量大小和输出扭矩的影响。
本文的仿真涉及到多物理场的耦合,首先通过Maxwell仿真得到球壳中的磁场分布,然后将磁场数据导入Fluent中,利用Fluent中的MHD(Magnetohydrodynamics)模块分析球壳中的流场分布,计算得到电流参数对球壳内流体流动的影响,并以其中一组电流参数为例计算了该球壳型磁流体姿态控制器的角动量大小和输出扭矩。
2 球壳型磁流体电磁场仿真
2.1 几何模型
构建几何模型图如图1所示,外部为电磁驱动器,高度为30mm,对其供以三相交流电。球壳内流体为金属液体镓,球壳外径为88mm,内径为70mm,镓的材料属性见表1。
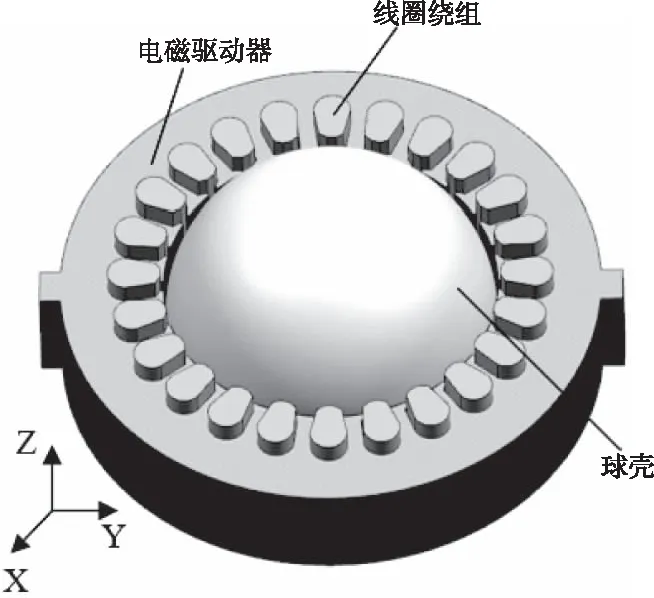
图1 球壳型磁流体模型图
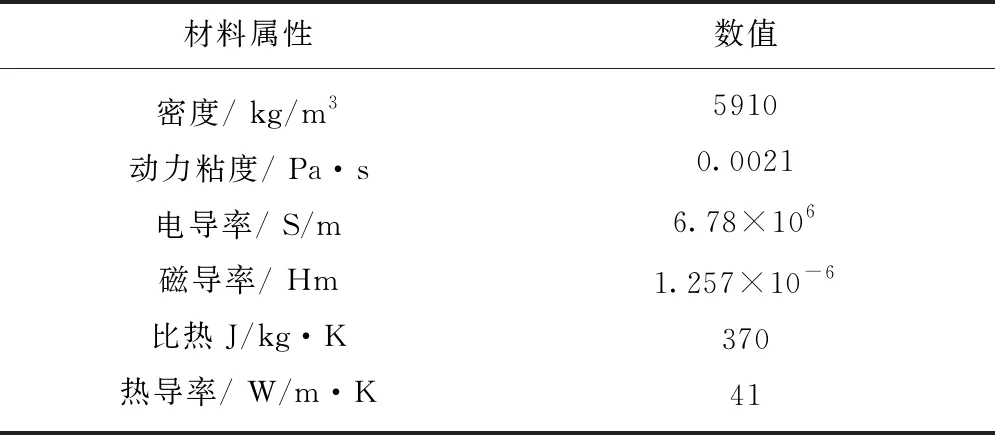
表1 镓材料属性
如图2所示,使用飞轮或流体环时,至少需要安装三套机构Hx、Hy和Hz,以产生(1,1,1)方向上1.73 N·m·s的角动量L为例,每个机构都需要产生1N·m·s的角动量,这相当于总计需要产生3N·m·s的角动量才能满足实际1.73N·m·s角动量的需求,而本文提出的球壳型磁流体姿态控制器只需将电磁驱动器调整到图示M位置处,产生1.73N·m·s角动量即可满足需求,动量利用率高。
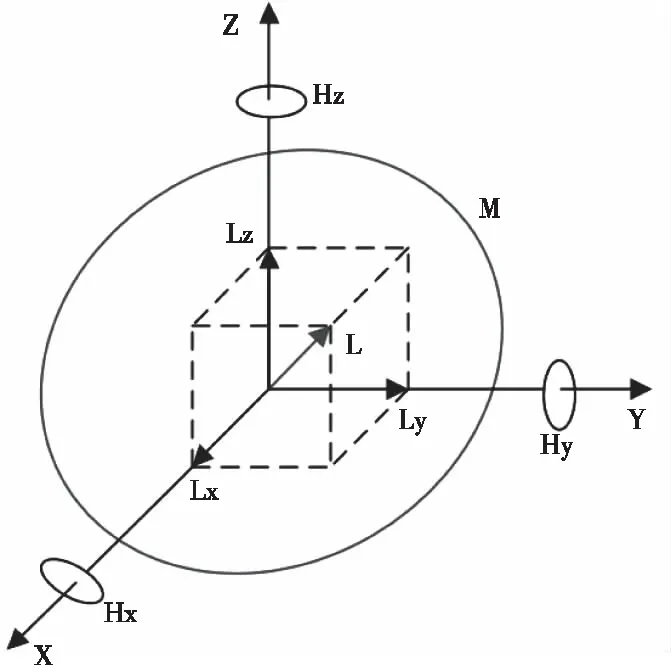
图2 角动量矢量图
2.2 电磁场仿真数学模型
交变电磁场是通过求解麦克斯韦方程组得到的,麦克斯韦方程组由描述磁场和电场相互作用和传播的四个方程组成,分别是描述电荷如何产生电场的高斯定律、论述磁单极子不存在的高斯磁定律、描述时变磁场如何产生电场的法拉第感应定律、描述电流和时变电场怎样产生磁场的安培环路定律,它们描述如下[6]。
∇·D=q
(1)
∇·B=0
(2)
(3)
(4)
其中,B和D分别是磁通密度和电通密度,H和E分别是磁场强度和电场强度,q为电荷密度,j为电流密度。
2.3 电磁场仿真结果
Maxwell软件利用有限元法求解麦克斯韦方程组。电磁驱动器为三相四极24槽,线圈匝数为240匝,供以三相交流电可在球壳内产生旋转磁场,以2A/匝为例得到磁场分布,图3和图4分别为电流相位为0°和90°时的磁场矢量图(XY视图),图5为电流相位为0°时的磁场云图(YZ视图)。
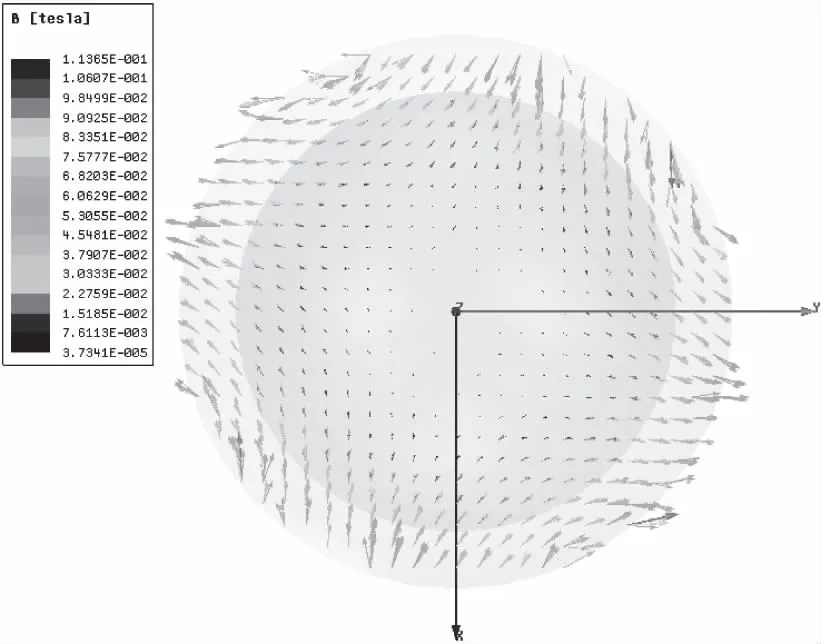
图3 电流相位为0°时的磁场矢量图
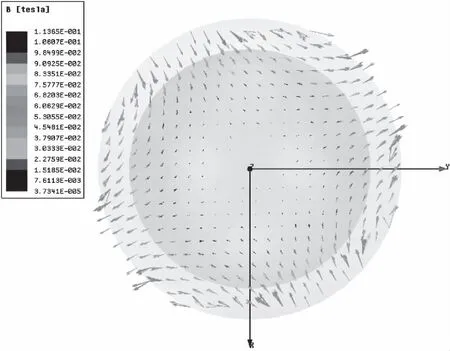
图4 电流相位为90°时的磁场矢量图
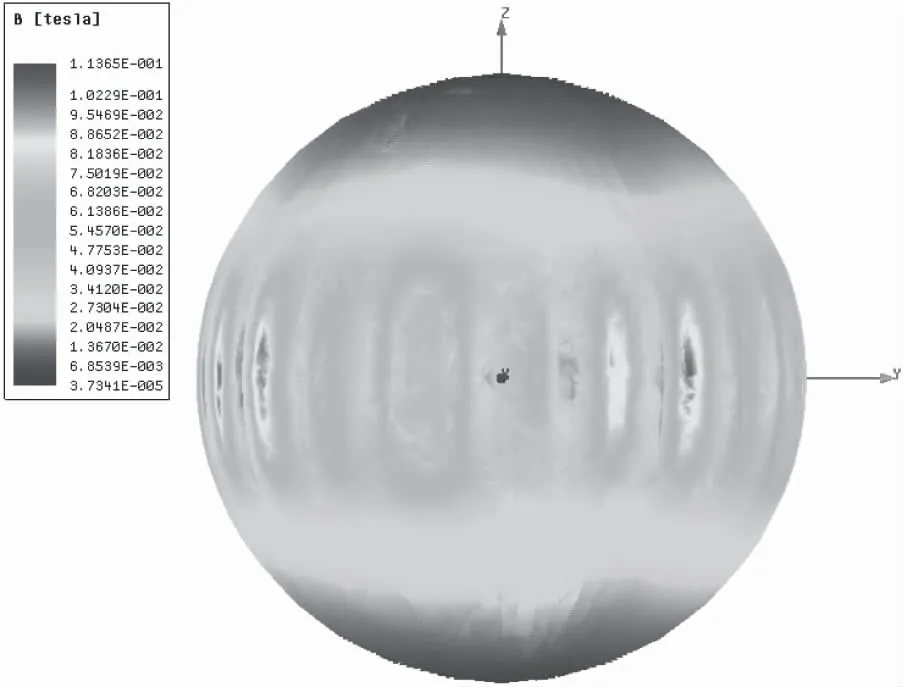
图5 电流相位为0°时的磁场云图
从图3和图4中可以看出,球壳内磁场在绕Z轴逆时针旋转,由于电磁驱动器线圈绕组为三相四极绕法,因此电流相位从0°变化到90°时,磁场仅旋转了45°。磁感应强度在径向方向上逐渐减小,球壳最外处有接近0.1T,在球壳内距离电磁驱动器最远处则降到了约0.03T,呈现出边缘大、中间小的特点。从图5中可以看出,球壳Z轴上磁感应强度呈现中间大两端小的趋势,仅电磁驱动器高度30mm范围内磁感应强度较大。
3 球壳型磁流体流场仿真
3.1 流场仿真数学模型
当磁场B0施加在以速度U旋转的球壳型金属液体上时,磁感应方程为[7]
(5)
式中,μ和σ分别为磁导率和电导率。由于流体的运动,外加磁场B0产生感应磁场b。因此,要得到总磁场B,即B0与b之和,只需计算感应磁场b,由式(6)求解
(6)
流体中产生的洛伦兹力F由式(7)描述,F作为源项被加到流体动量方程中。
F=j×B=j×(B0+b)
(7)
流体连续性方程和动量方程分别为[8]
∇·U=0
(8)
(9)
其中,μeff=μl+μt为有效粘度,μl为动力粘度,μt为湍流粘度。采用Realizablek-ε湍流模型计算,湍流动能k和耗散率ε输送方程为[9]
(10)
(11)
3.2 流场仿真结果
Fluent中网格划如图6所示,球壳中流体在旋转磁场作用下,绕Z轴逆时针旋转。当电磁驱动器中电流(50Hz)分别为0.5A/匝、1 A/匝、1.5 A/匝、2 A/匝、2.5 A/匝时和电流(2A/匝)分别为10Hz、20Hz、30Hz、40Hz、50Hz时,利用Maxwell得出相应的旋转磁场B0并导入Fluent中,使用Fluent的MHD模块,以稳态方式计算了球壳型磁流体XY平面径向方向上的流速分布和总体平均流速,见图7-图10。
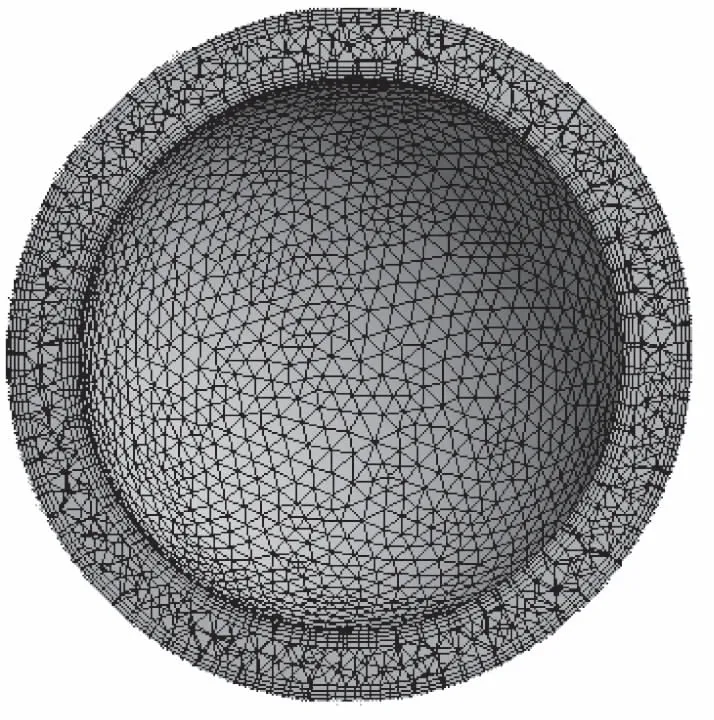
图6 球壳型磁流体网格划分
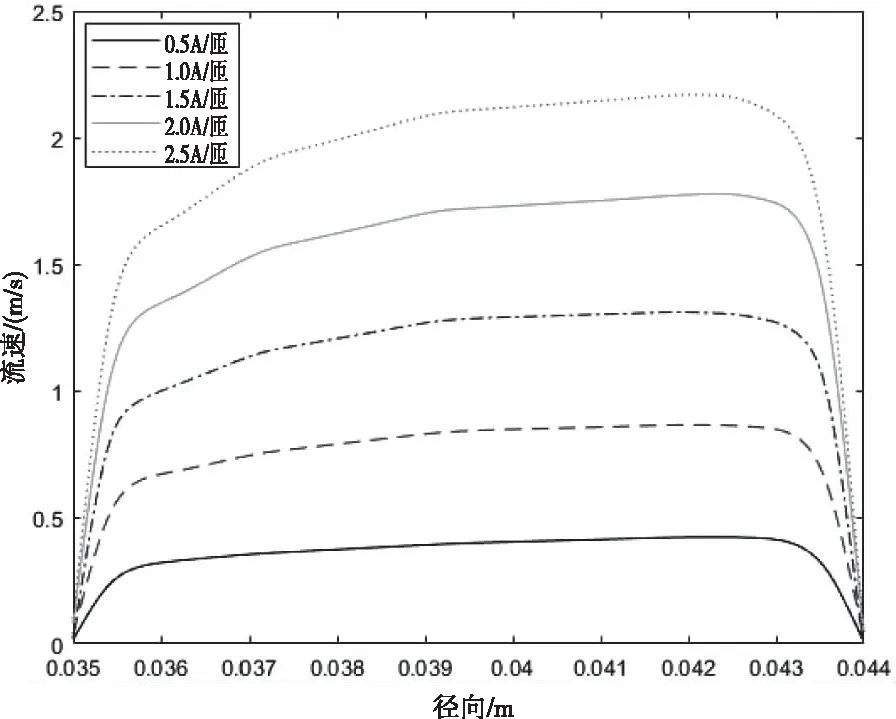
图7 不同电流强度下径向流速分布
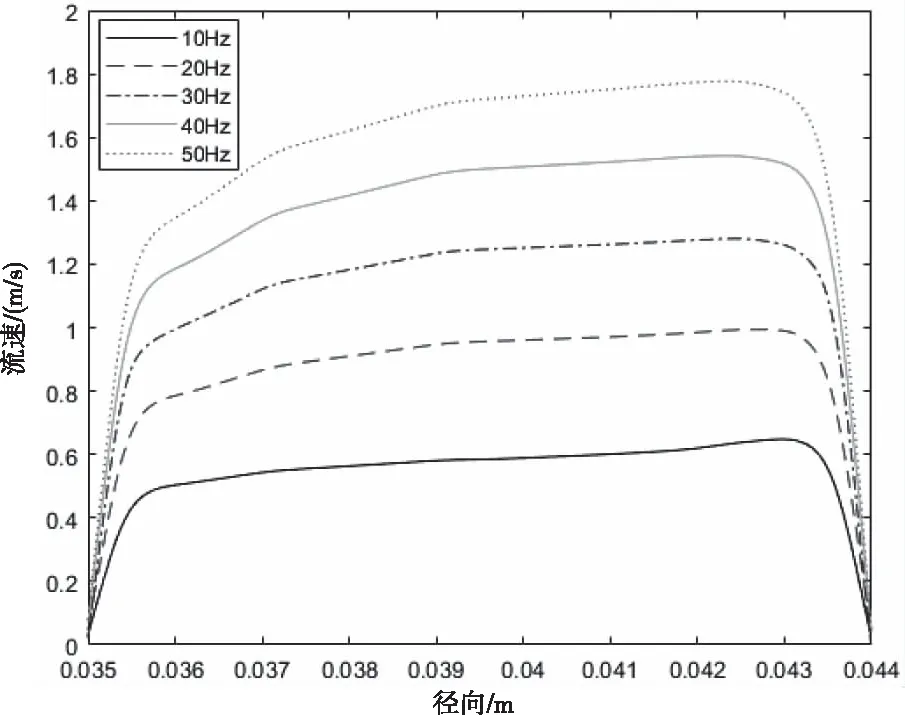
图8 不同电流频率下径向流速分布
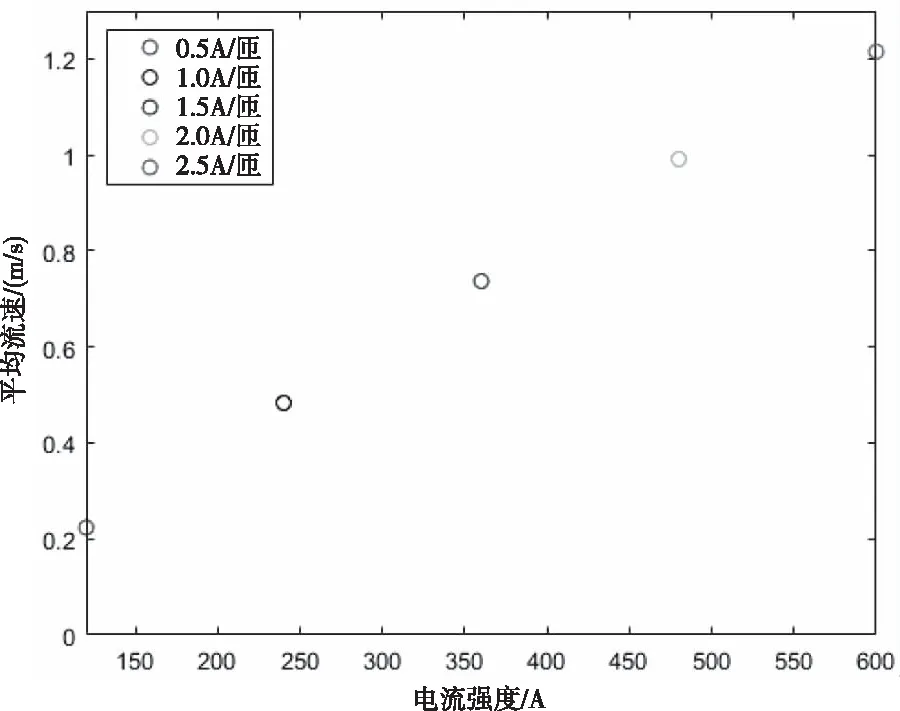
图9 不同电流强度下平均流速
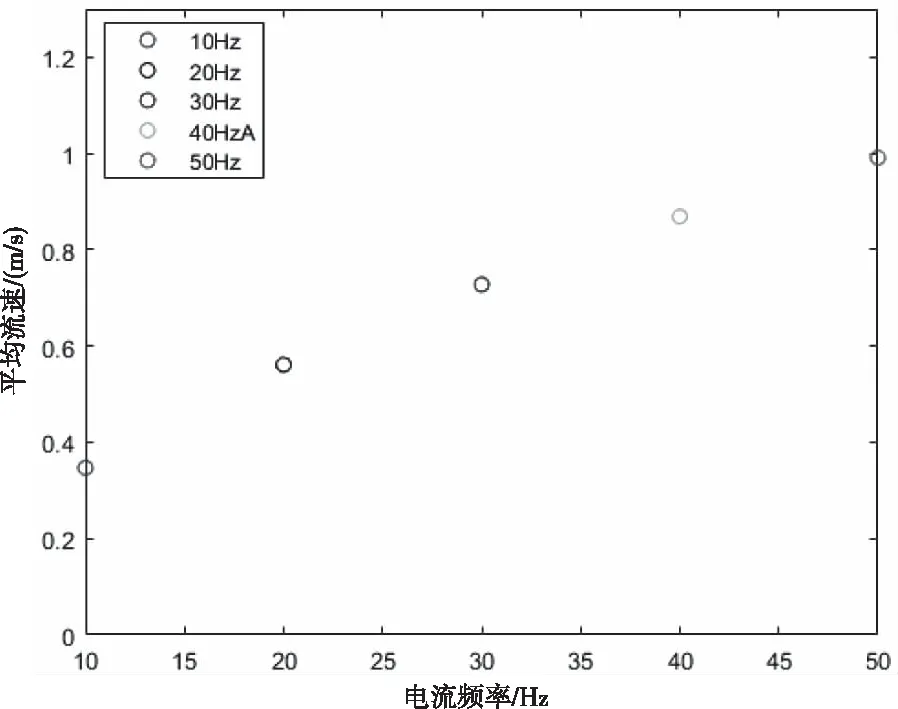
图10 不同电流频率下平均流速
从图中可以看出,球壳内外壁处流速为0,从壁面处起流速逐渐增大,靠近外壁处比靠近内壁处的流速更大,因为外壁处的磁感应强度更大,因此洛伦兹力也更大。此外,电流强度越大,流体平均流速也越大,两者几乎呈线性关系。而电流频率越大,流体平均流速呈非线性趋势增大,因为电流频率越高电磁场集肤效应越明显[10],这样三相交流电产生的交变电磁场主要集中在金属流体表面,对流速的增加作用反而不大。
4 球壳型磁流体仿真结果分析
流体速度为U(x,y,z,t)=(u(x,y,z,t),v(x,y,z,t),w(x,y,z,t)),该球壳型磁流体机构产生的角动量为L(t)=(Lx(t),Ly(t),Lz(t)),则有
(12)
以图1所示状态为例,当前球壳型磁流体有用的角动量为Z轴方向的角动量,其它两个方向的角动量大小应等于零,根据上式可得,Z轴方向角动量大小为

(13)
根据角动量定理可知,球壳型磁流体产生的扭矩为角动量对时间的变化率,有用的扭矩为其在Z轴方向上的分量,球壳型磁流体沿Z轴方向的输出扭矩大小为
(14)
根据角动量守恒原理,球壳型磁流体反作用于卫星系统其它部分的角动量大小也为Lz,方向相反,输出的扭矩大小为Tz,该扭矩即是可以用于卫星姿态调节的扭矩。以电流为50Hz,2A/匝为例,根据公式可以得出流体环Z轴角动量和扭矩随时间变化图如图11和图12所示。
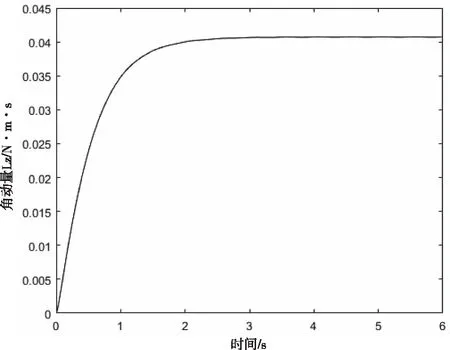
图11 Z轴方向角动量与时间关系图
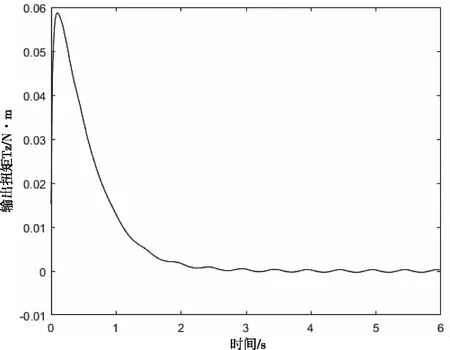
图12 Z轴方向扭矩与时间关系图
由图可知,球壳型磁流体沿Z轴方向角动量大小从零开始逐渐增大,初期角动量变化较快,随着时间的增加角动量增加的速度逐渐减缓,2s左右角动量开始接近于稳定的状态,随后的时间里角动量大小几乎没有发生变化。根据仿真结果,在该条件下所能够达到的Z轴方向角动量最大值约为0.04 N·m·s。
根据式(14),输出扭矩的大小即为角动量的变化率,扭矩的大小能够直接反应该机构角动量变化的快慢,也是卫星调姿机构的重要指标之一。由图中可知,输出扭矩在流体静止开始加速的时候最大,随后扭矩逐渐减小,到了2s后逐渐接近于零,该机构Z轴方向最大输出扭矩大小约为0.059 N·m。
5 总结
本文采用三相交流电产生旋转磁场,在液态金属镓中感应出电流,利用电磁场中的洛伦兹力驱动金属流体运动,并对设计方案进行了推导计算和仿真,得出以下几个结论:
1) 本文提出的球壳型磁流体卫星调姿方法产生动量的是流体而不是刚体,整体运动更加平稳,磨损较少,与现有主要调姿方法如机械飞轮等相比,具有颠覆性的优势,并且三轴调姿仅需一个调姿机构即可实现。
2) 对球壳型磁流体机构进行建模并仿真分析了流体区域中的电磁场,磁感应强度由外壁侧向内壁侧逐渐减小,Z轴方向上由球心处向两侧逐渐减小,磁场绕Z轴做逆时针旋转;
3) 仿真分析了球壳内流场情况,流体平均流速几乎随着电磁驱动器电流强度的增加而线性增加,由于集肤效应,随着电流频率增加,流体平均流速非线性增加。靠近外壁侧流速比靠近内壁侧流速大。
4) 计算了球壳型磁流体在静态初始条件下加速后Z轴方向角动量大小和扭矩大小变化情况,球壳外径为88mm,内径为70mm,电磁驱动器线圈匝数为240匝,电流为50Hz,2A/匝时,大约经过2s左右能够达到稳态,角动量变化率逐渐减小至零,产生的角动量大小最大约为0.04 N·m·s,最大扭矩约为0.059 N·m。