基于固定时间扰动观测器的四旋翼无人机轨迹跟踪控制
2021-11-01张爱华苏梓楠刘小旭
张爱华,苏梓楠,刘小旭
(1. 渤海大学 创新创业学院,辽宁 锦州 121013; 2. 渤海大学 控制科学与工程学院,辽宁 锦州 121013;3. 深圳技术大学 中德智能制造学院,广东 深圳 518118)
0 引言
在过去的几十年里,无人驾驶飞行器系统(UAS)凭借其独特的优势和研究价值,在自动控制系统领域中得到了越来越多的学者重视。四旋翼是一种小型无人驾驶飞行器,配备有4个螺旋桨,可以进行垂直起降与6个自由度放心度的运动[1]。四旋翼无人机因其具有机动性强、操作方便、较强的隐蔽性、复杂环境中的稳定性等特点,在商业和军事领域中得到广泛应用。近年来,四旋翼无人机已广泛应用于航空摄影、电力检查、包裹运输、农业植物保护、军事侦察、地理勘探、搜救等诸多领域[2-4]。因此,工业界针对四旋翼进行设计的控制算法数量也在与日俱增,以满足不同任务下无人机的设计要求[5]。
为了使四旋翼无人机更具灵活性同时能更好地完成任务,目前大部分无人机都具有6个自由度(DOF),即包括3个平移自由度与3个旋转自由度[6]。由于四旋翼无人机的应用场景大多为室外区域,甚至为一些较为复杂恶劣的环境,因此,无人机的抗扰性能成为了其控制的首要关注点,如何针对复杂外部干扰进行补偿是使得无人机稳定的关键因素之一;同时,其作为一个典型的非线性欠驱动高耦合控制系统,近年来越来越多的学者提出了跟踪和控制四旋翼无人机在复杂干扰情况下的新方法理论[7]。
首先,最经典的研究方向为线性控制方法。其中,PID控制器[8-11]由于简单易用且稳定的控制结构而得到广泛使用。在Wang等人的工作中[8],针对动态未知数字PID控制系统的容错问题设计了具有容错补偿功能的闭环控制系统。在Javier等人的工作中[9],在四旋翼无人机位置和姿态增益不确定的前提下,提出了新的PID控制算法,特别是在执行器故障的情况下,取得了较好的控制效果。同时,针对四旋翼无人机高速控制器缺乏精确的动态模型问题,Hoffmann等人[10]提出了基于PID控制的新型四旋翼无人机架构。文献[11]设计了一种基于PID控制的新型固定间距无人机,结合了直升机和四旋翼的结构特点设计了一种新型的三角四旋翼无人机结构。此外,线性二次调节器(LQR)技术[12-13]也已应用于无人机以实现相应的飞行控制任务。为了获得处于悬停状态的四旋翼无人机的最佳反馈增益,Dhew等人[12]设计了基于LQR方法的新型四旋翼控制方法,取得了良好的效果。在Wu等人的工作中[13],在传统LQR控制器的基础上,提出了基于神经网络ARX模型集的改进LQR控制器,实现了增益调度功能,更好地控制四旋翼无人机。
通过比较上述经典的线性控制方法,我们不难发现,线性控制方法以其出现较早、控制结构简单、易于实现等特点广泛应用于诸如对新无人机结构的测试、与新控制算法的结合当中,但是其自身难以应用于复杂控制场景,对存在较强干扰的非线性系统来说鲁棒性提升较小。随着学者们的不断研究,现代控制方法近几十年来得到了广泛的发展。越来越多的现代控制方法应用于四轴无人机,以完成基于复杂非线性系统的各种高精度任务,在高精度跟踪控制中获得了广泛的应用。例如,滑模技术[14-16],自适应控制技术[17-18],模型预测技术(MPC)[19-20],输出反馈控制[21-22],模糊逻辑技术[23],神经网络[24-25],鲁棒控制[26]等。在文献[14]的工作中,针对四旋翼的4个电机的鲁棒控制问题,提出了基于有限时间滑模观测器的跟踪控制策略。在Zhao等人的工作中[15],在内环控制中使用滑模技术设计控制器用于外环控制,解决了欠驱动四旋翼无人机系统的渐进式跟踪控制问题。针对四旋翼无人机物理结构老化问题,Liu等人的研究[16]中提出了一种将自适应和滑模技术相结合的姿态容错控制方法。在Chen等人的研究[17]中,通过采用基于预测的自适应优化控制方法,解决了单机逻辑失控的情况,使无人机能够获得更好的性能。针对四旋翼无人机在强扰动下的有限时间姿态控制问题,文献[18]提出了基于二阶多变量系统自适应有限时间控制算法。在Torrente等人的研究[19]中,通过将MPC引入四旋翼控制器的设计,并采用全新动态建模方法,四旋翼可以实现高精度轨迹跟踪。针对强风噪声下无人机跟踪精度低的问题,Alexis等人[20]设计了一种新型的切换模型预测控制器。在Dierks等人的研究[21]中,引入一种以神经网络技术为基础的优化输出反馈控制方法,解决四旋翼无人机的控制问题。在Shao等人的研究[22]中,将与动态表面控制相结合的神经网络理念引入传统的基于反馈控制的四旋翼控制算法中,从而提高了控制精度,进一步降低了成本。在Han等人所提出的一种新型的四旋翼控制方法[23]中,将模糊回声状态网引入四旋翼控制器的设计中,以更好地提高控制能力。文献[24]通过引入神经网络来进一步优化无人机飞行控制问题。文献[25]进一步证明神经网络可用于基于四旋翼的脉冲估计器的系数训练当中。为了解决多输入多输出系统中存在的不连续非线性随机泊松扰动时的轨迹跟踪问题,文献[26]提出了一种新的鲁棒控制算法。
上述非线性控制方法在解决了高精度跟踪控制问题的同时也增加了计算的复杂度,对于非线性系统的控制器设计来说,反步法(backstepping)是一个比较易于实现且非常有效地控制方法[27-28]。Zhou等人的研究[27]中,提出基于经典反步法的积分反步法,并比较了该方法与经典反步法,有效地说明了反步法在非线性控制中的优越性。同时为了解决反步法实际应用中的维度爆炸问题,Shao等人的研究工作[28]提出在传统反步法的基础上应用动态表面控制技术用于轨道跟踪和姿态稳定。
虽然基于现有的各种控制方法,四旋翼无人机可以达到良好的轨迹跟踪精度,但仍存在一些问题,例如针对在复杂干扰下的传统反步法的跟踪精度不高等问题。同时,常规扰动观测器在收敛时间上存在一定的不确定性。基于以上存在的问题,本文提出了一种基于固定时间理论的扰动观测器,旨在使系统能够快速响应外界复杂干扰的变化情况,同时在系统中引入基于传统反步法的反馈补偿控制器,以提高复杂外部扰动作用下的轨迹跟踪精度,增强系统的鲁棒性。
文章的主要贡献如下:
1)针对姿态环和位置环分别设计反步法控制器与固定时间扰动观测器(FOBC)实现了四旋翼无人机6-DOF的双闭环控制。借助于姿态环与位置环之间的高度耦合关系,可以实现高精度轨迹跟踪。
2)提出基于固定时间理论的扰动观测器,使系统能够在固定时间内准确估计外部干扰值,从而为控制器提供准确的干扰补偿值,使整个系统能够消除扰动带来的影响。
文章的结构如下:第1节描述了四旋翼无人机的 6-DOF 动态模型和控制问题陈述。第2节对本文所提出的控制算法进行设计说明,并证明了其稳定性。第3节针对本文所提出的控制方法进行数值仿真实验,在第2节基础上进一步验证其有效性。第4节总结全文工作并为今后的工作指明方向。
1 数学模型与问题陈述
1.1 四旋翼无人机数学模型
四旋翼无人机为一个具有六自由度的欠驱动系统。为了更好地展示四旋翼的机械结构,图1给出了飞行器的总体受力情况。其中Ee{OEXEYEZE}表示地球坐标系,Bb{OBXBYBZB}表示无人机机体坐标系,OB表示四旋翼无人机的质量中心。

图1 四旋翼无人机3D结构
假设1:四旋翼无人机是一个严格对称的刚体。
假设2:地球表面是一个严格的平面,同时地球系可以定义为一个惯性系。
假设3: 重力加速度恒定且垂直于地球表面。
假设4:由于无人机螺旋桨叶片旋转时的不稳定性引起的扰动可以忽略不计。
四旋翼无人机飞行时所处空间的3个位置信息表示为χ=[x,y,z]T,同时由机身坐标系产生的线速度表示为v=[vx,vy,vz]T。机身的惯性矩阵I∈3×3定义为进一步的使用3个欧拉角δ=[φ,θ,ψ]T来描述无人机旋转运动,其中φ∈为绕XB轴旋转时的横滚角,θ∈为绕YB轴旋转时的俯仰角,ψ∈为绕ZB轴旋转时的偏航角。角速度表示为ϖ=[ωφ,ωθ,ωψ]T。无人机运动学方程表示为(1)~(2):
(1)

(2)
式(1)与(2)中的T,R∈3×3分别表示无人机的转移矩阵与旋转矩阵,可以由以下形式给出:
(3)
(4)
式中,S(·),C(·),T(·)分别表示三角函数sin(·),cos(·),tan(·)。
通过应用“欧拉-拉格朗日”方程,无人机的平移动力学方程可以转写为如下形式:
(5)
其中:m∈为四旋翼无人机的质量,FU∈3由FU=Tρ表示,其中表示由四旋翼4个电机转子产生的推力。FG∈3表示无人机所承受的重力可以由公式表示,g表示重力加速度常数。dχ∈3表示施加在四旋翼上的外部复杂干扰力。
四旋翼飞行器的姿态动力学方程可以改写为一般形式:
(6)
其中:τf,τd∈3表示控制转矩和扰动转矩。同时,Ν(δ)∈3×3表示为如下形式:
Ν(δ)=
(7)
(8)

c11=0
此外,四旋翼螺旋桨产生的扭矩可以表示为:
(9)
1.2 问题陈述
本文旨在使四旋翼无人机在复杂外界干扰条件下准确跟踪期望轨迹信号。因此,控制问题可以描述为任何具有初始偏航角的四旋翼飞行器,设计一种姿态和位置的全6-DOF跟踪控制方法,以确保四旋翼飞行器即使在外部干扰下仍能得精确跟踪期望的轨迹。此外,无人机的位置和姿态的期望值可以分别给出为χd=[xd,yd,zd]T∈3,δd=[φd,θd,ψd]T∈3。为了进一步设计控制器,χe=χ-χd=[xe,ye,ze]T,δe=δ-δd=[φe,θe,ψe]T分别定义了位置和姿态跟踪误差。
假设5:给定的姿态与位置期望轨迹信号满足二阶连续可导性且有界。

2 控制律设计与稳定性分析
为了实现上节提出的四旋翼无人机在受到复杂外部干扰下仍能实现高精度跟踪的任务,本章提出了一种基于固定时间理论的扰动观测器与控制器相结合的抗扰控制方法。如图2所示,首先设计两个基于固定时间理论的扰动观测器来重构位置和姿态环的扰动量,即扰动力和扰动力矩。在此基础上,利用backstepping方法分别设计了位置和姿态控制器。最终,该闭环系统可以准确地重构并抵抗外部扰动,从而在存在复杂外部干扰的情况下实现对期望轨迹的精确跟踪,通过Lyapunov方法证明了闭环系统是渐近稳定的。

图2 控制方法流程图
2.1 位置环的固定时间抗扰观测器设计
固定时间收敛特性是指系统状态从任意初始条件开始,都会在有限时间内收敛到平衡点,且收敛时间一致且有界。
为了便于固定时间观测器的设计,根据式(1)表示的四旋翼动力学模型建立如下状态方程:
x1=χ
(10)
(11)
(12)
为了进一步设计观测器,下面的辅助系统xA∈3由下式给出:
(13)
其中:Λ1∈为一个正定向量,同时xr=x2-xA。
定理1:用来估计扰动dχ的扰动观测器设计如下:
(14)

进一步的设计固定时间观测器为如下形式:
λ1|e1|psign(e1)+λ2|e1|qsign(e1)
(15)


(16)
Λ2Λ3e1-λ1|e1|psign(e1)-λ2|e1|qsign(e1)
(17)
将公式(17)进一步转换可以得到:
(18)
定义一个新变量为∏=e(1-q)1,式(18)可以转换为:
Λ2Λ3∏1/(1-q))=-(1-q)(λ1∏(p-q)/(1-q)+λ2+Λ2Λ3∏)
(19)
∏(0)=∏0
(20)
将式(19)改写为式(21):
(21)
对上式两边进行积分可得式(22):
(22)
定义新变量ϑ(∏)为如下形式,同时对式(22)进行改写:

(23)
ϑ(∏)-ϑ(∏0)=-(1-q)t
(24)
其中:∏0为∏的初值,可以得到ϑ(∏0)为一个常数,进一步可以给出以下定量关系:
(25)
由于当t趋向于无穷时ϑ(∏)为一个单调递减函数,因此当且仅当∏=0时,e1=0,ϑ(∏)=0。为了验证方程(10)中的e1收敛到e1=0,只需验证在t趋向于无穷时ϑ(∏0)收敛到ϑ(∏0)=0。
选择一个Lyapunov函数V=ϑ(∏)2/2,可以得到:

(26)

(27)

(28)

(29)
将式(15)与式(13)结合可以得到:
(30)

从上述证明以及结论中我们可以得出定理1成立。
2.2 姿态环的固定时间抗扰观测器设计
为了更好地消除未知复杂扰动对四旋翼无人机姿态的影响,本节将设计一个基于固定时间的抗扰观测器来估计未知复杂扰动值。根据式(2)可进一步将四旋翼的动力学方程改写为:
(31)
进一步定义一个新的状态变量为:

(32)

τf+τd-Μ(Θ1,Θ2)

(33)
定理2:一个用于估计姿态环扰动τd的扰动观测器设计如下:
(34)

姿态环的固定时间观测器可以设计为:

(35)


(36)
证明:如定理1证明类似,观测器如下:
(37)
可见,此二阶系统满足式(18)中显示的结构,即系统全局收敛至0。不难发现式(37)中k1,k2,k3,α,β可分别类比与式(18)中的λ1,λ2,λ3,p,q。故此证明过程与定理1证明类似,同理可以证得e2在固定时间内收敛于0。且上限满足式(36),收敛时间上限只与k1,k2,k3,α,β有关。
观测器误差τe满足:
(38)
由此可得定理2成立,观测器误差τe能够在固定时间内收敛至0。
2.3 位置环控制律设计
在本节中,将针对无人机位置环控制器部分进行设计,backstepping技术由于其有效性及稳定性一直被广泛应用在非线性控制系统中,本节中将backstepping技术与前文所设计的固定时间抗扰观测器相结合来设计四旋翼无人机位置环控制器。位置跟踪误差χe已在第 1.2 节中给出,同时引入一个新变量:
(39)

定理3:对于式(1)中所示的基于位置的动态方程,位置控制定律设计为如下形式:
ρ=
(40)
其中:控制增益满足ka>0,kb>1,Λ2Λ3>1。
当基于该控制律的闭环控制系统在受到复杂外部扰动dχ时,整个控制系统能够达到渐近稳定。
证明: 将(40)进一步转化可以得到:
(41)
选择Lyapunov函数:
(42)
其导数可以推到如下公式:
(43)
由式(30)可得:
(44)
将式(44)代入式(43)可进一步得:
(45)
≤-2ΔVb
(46)
其中:Δ=min{ka,kb-1,Λ2Λ3-1}>0,因此V1满足V1(t)≤V1(0)e-2Δt。综上所述,位置环控制器能够渐进稳定。
2.4 姿态环控制律设计
姿态环控制器的设计过程与前一节中给出的位置环控制器相似。引入另一个新变量:
(47)

定理4:对于式(2)中所示的无人机姿态动力学方程,控制律可以设计为如下形式:
(48)
姿态控制律中的控制增益选择为la>0,lb>1,a2a3>1。
当基于该控制律的闭环控制系统在受到复杂外部扰动τd时,整个控制系统能够达到渐近稳定。
证明: 这部分证明类似于定理3,使用相同的证明方法。将式(48)代入动力学方程,可以获得:
(49)
选择Lyapunov 方程V2:
(50)
其导数可以写成如下的形式:
(51)
由观测器公式(38)可得:
(52)
将式(52)代入式(51)可得:
(53)
(54)
其中:Δ=min{la,lb-1,a2a3-1}>0。因此,V2满足V2(t)≤V2(0)e-2Δ2t。综上所述,姿态环控制器能够渐进稳定。
总之,通过定理3和定理4及其证明,当该6-DOF无人机系统受到复杂外部扰动时,可以得到本文所设计的由位置与姿态环构成的闭环控制系统在固定时间内全局渐进稳定。后续的仿真实验更进一步验证了这一结论,同时验证了引入固定时间观测器可以很好地估计外部干扰,并同时在固定时间内实现收敛。
2.5 踪控制器的实际实现
由于四旋翼无人机是一种多转子欠驱动系统,其位置环和姿态环之间为高度耦合关系。为了更好地跟踪轨迹,姿态环中除了给定的期望偏航角度ψd之外,横滚角φd与俯仰角θd将有位置环进行进一步结算得出。通过李代数计算虚拟控制信号Ua,可以得出“欧拉角”的参数化提取满足以下要求:
(55)
在此基础上,以下公式可以通过任何给定的偏航角ψd获得所需的横滚角与俯仰角的期望值
(56)

(57)
3 实验结果与分析
本节中,通过数值仿真来验证本文针对四旋翼无人机在受到复杂干扰情况下的跟踪问题所设计控制方法的性能。对在复杂外部扰动作用下的轨迹跟踪情况进行模拟。
无人机模型式[27]与控制律中的参数选择为:m=1.44 kg,g=9.8 m/s2,Ix=0.03 kg·m2,Iy=0.03 kg·m2,Iz=0.04 kg·m2,b=3.026×10-5Ns2,d=3.122×10-6Ns2,Λ1=0.002 5,Λ2=5.5,Λ3=70,λ1=λ2=20,p=α=1.3,q=β=0.6,k1=k2=50,a1=0.001,a2=7.5,ka=150,kb=25,la=100,lb=20.8。
仿真部分将模拟施加复杂外部干扰的四旋翼无人机轨迹跟踪情况。控制目标是确保四旋翼能够跟踪期望轨迹。下面描述了本实验给定的期望轨迹:
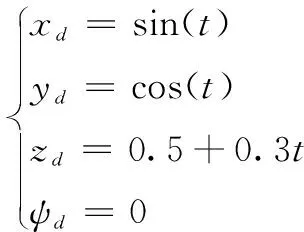
(58)
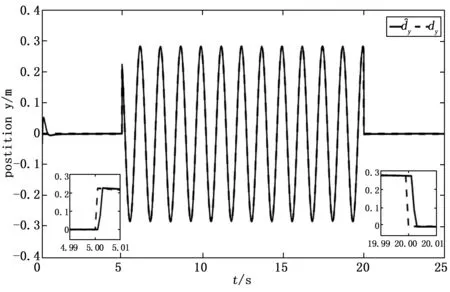
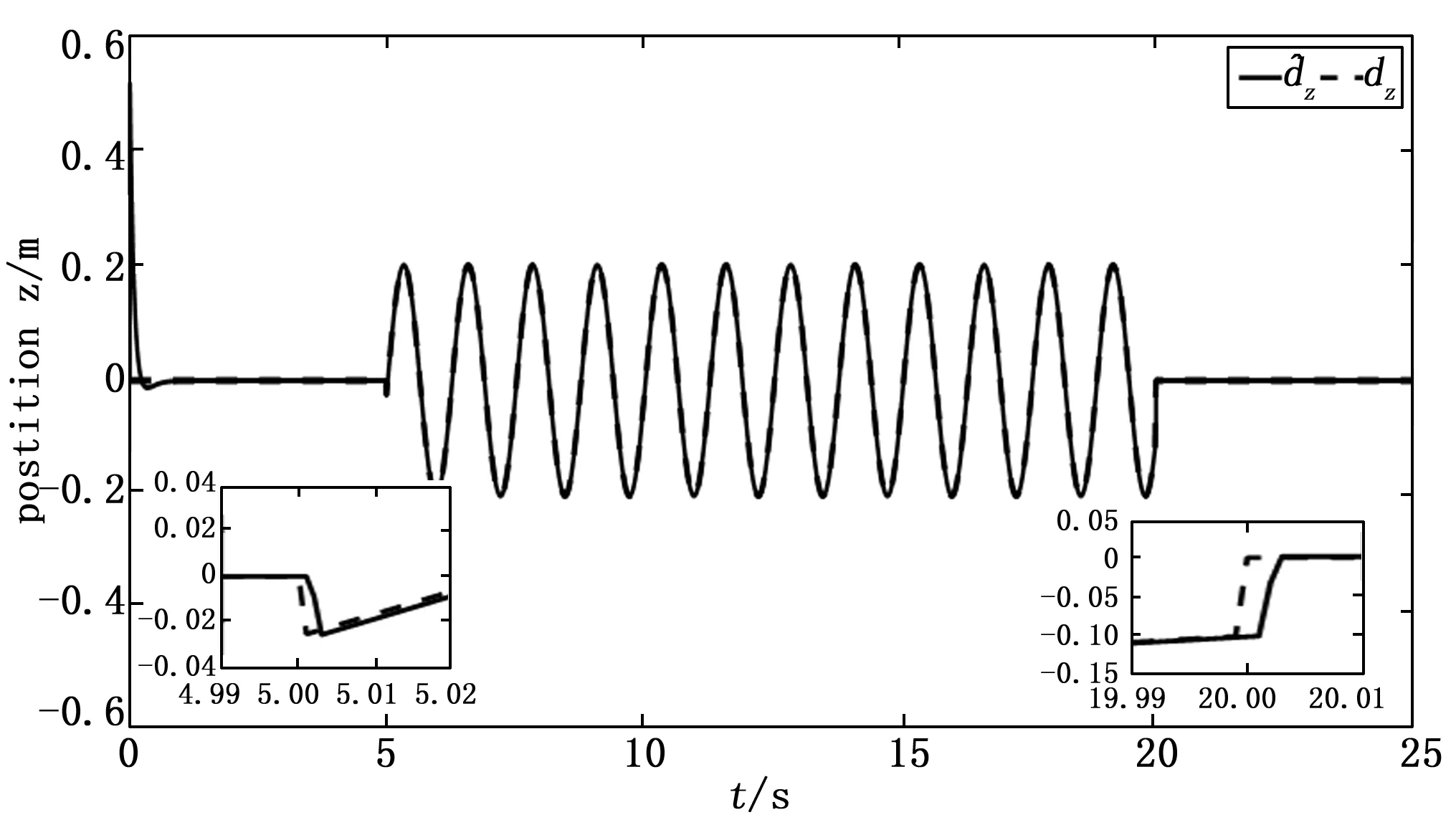
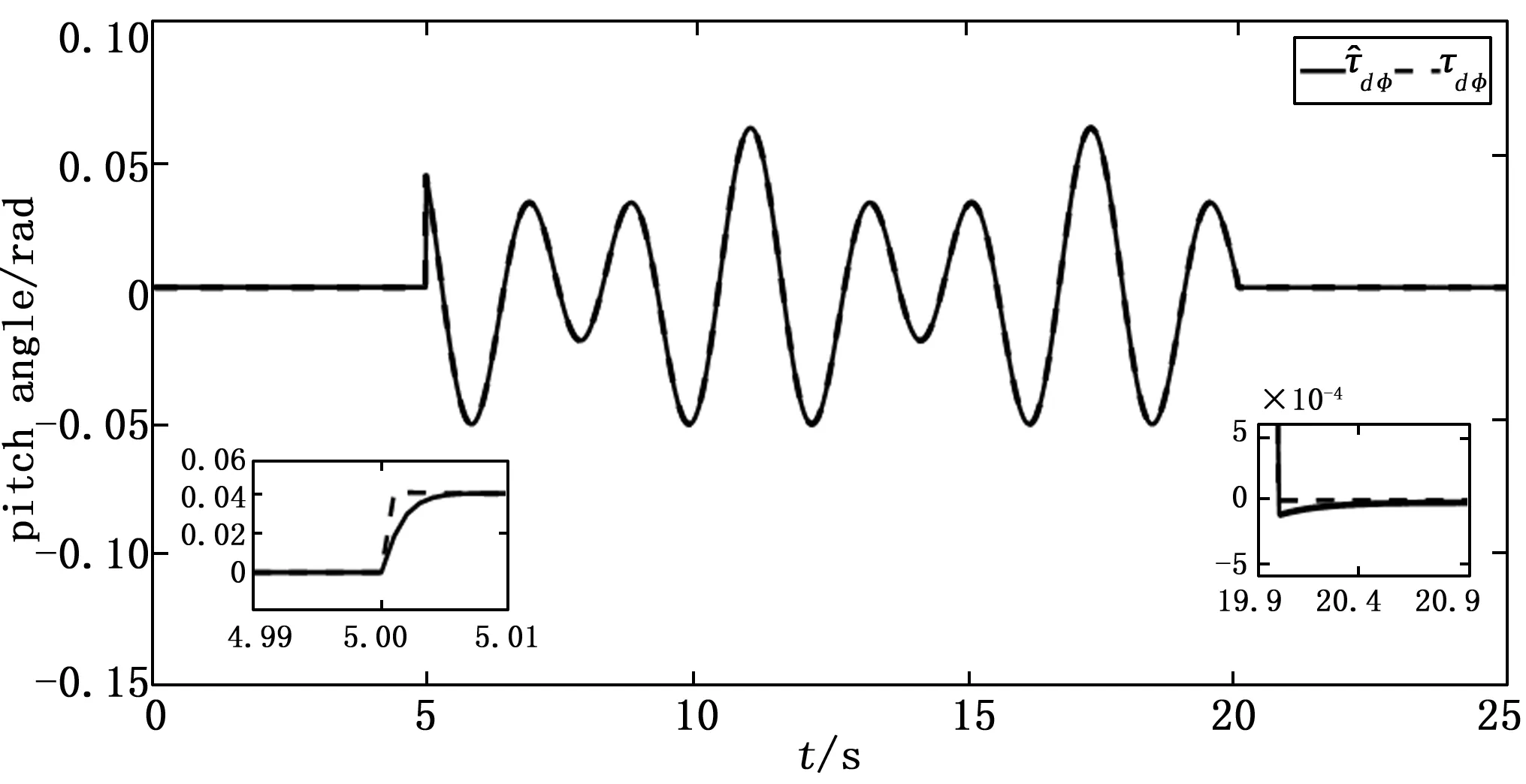
同时为了验证所设计的观测器可以实时估计干扰,在5~20 s内对6自由度给定由常值信号与时变信号组成的复杂外部干扰信号:
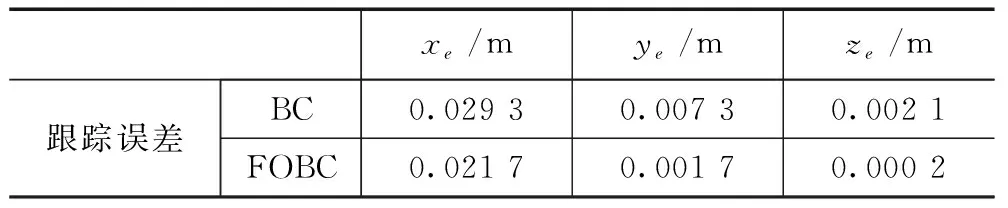
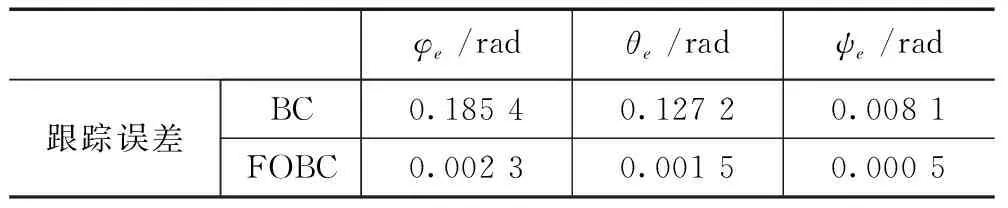
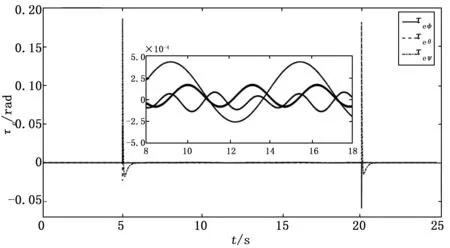
dy=0.2cos(5t)-0.2sin(5t) 5 (59) dz=0.2sin(5t) 5 τdφ=0.5cos(2t) 5 τdθ=0.2sin(3t)-0.1cos(2t) 5 (60) τdψ=0.5sin(2t) 5 图3显示整个轨迹跟踪阶段,对FOBC与 BC方法的轨迹跟踪效果进行比较,以显示在复杂外部扰动作用下本文所提出方法的有效性。图4和5分别显示位置和姿态的跟踪误差比较,表1和表2进一步提供了实验的可靠性。 图3 BC与FOBC轨迹跟踪效果对比 图4 位置误差(xe,ye,ze)对比 从图3的实验结果中可以看出,本文提出的FOBC控制方法的跟踪效果明显优于传统的反步控制方法(BC),可以有效补偿轨迹跟踪中的复杂外部干扰,提高四旋翼无人机的稳定性及鲁棒性。同时,由图4~图5的曲线可以看出该方法的误差、超调以及鲁棒性均优于传统反步法。表1以及表2所示的跟踪误差对比情况,显示出在轨迹跟踪时本文所提出的方法比BC法误差更小,无人机系统能获得更好的抗扰性能。 图5 姿态误差(φe,θe,ψe)对比 表1 BC与FOBC的位置跟踪误差对比 表2 BC与FOBC的姿态跟踪误差对比 为了进一步分析所提方法的可靠性,以下给出观测器的仿真结果,图6~11反映了观测器对复杂外部扰动的重构能力,给出观测器估计值跟踪观扰动真实值的能力,同时,在图12和图13中进一步给出观测器估计误差图,表3与表4给出了观测器误差的数据说明。 表3 位置环观测器估计值误差 表4 姿态环观测器估计值误差 图6~8中所得出的位置环扰动观测器具有很好的估计扰动的能力,在扰动发生前后能够在0.5 s内快速估计并跟踪扰动值;图9~11显示了角度环扰动观测器估计扰动的能力。图12~13展示了两个观测器估计扰动的误差,可以得出当扰动发生后,两个观测器能够精确估计并跟踪扰动值,误差精度控制在10-4。 图6 外部干扰dx轨迹及其估计值 图7 外部干扰dy轨迹及其估计值 图8 外部干扰dz轨迹及其估计值 图9 外部干扰τdφ轨迹及其估计值 图10 外部干扰τdθ轨迹及其估计值 图11 外部干扰τdψ轨迹及其估计值 图12 位置外部干扰估计误差de 图13 姿态外部干扰估计误差τe 从上述仿真模拟结果中可以得出,通过引入固定时间扰动观测器的设计,可以在短时间内准确估计并重构复杂外部扰动值。综上可进一步说明本文提出的固定时间扰动观测器可以有效地消除外部干扰对无人机轨迹跟踪的影响,证明本方法的优越性与更强的鲁棒性。 本文针对六自由度小型四旋翼无人机在复杂外部干扰作用下只依靠控制器无法实现高精度的轨迹跟踪问题,提出了一种基于固定时间扰动观测器与反步法控制器相结合的跟踪控制方法。在传统反步法控制器基础上引入了固定时间扰动观测器,使得无人机在受到复杂外部干扰作用时能够快速重构并抵抗扰动,进而实现高精度的轨迹跟踪任务,针对无人机的6个自由度采取双闭环控制方法,将位置与姿态环分别进行观测器与控制器设计,最后借助位置与姿态的强耦合性实现最终的控制。同时,借助利用Lyapunov稳定性理论,证明了该控制方法能够使该无人机双闭环系统达到渐进稳定。数值仿真结果验证了该方法在四旋翼无人机受到外界复杂干扰时执行轨迹跟踪的任务的有效性,并可以快速精准地对外界干扰值进行重构,并估计出未知扰动。通过对与只采用传统反步法的控制系统进行对比,进一步验证了所提出方法的有效性与优越性。 本文所提出的控制方法虽然对复杂扰动有效,但仍然对电机失效等无人机常见故障问题存在容错能力不足的情况,后续的研究将针对这一方面进行,考虑引入切换系统来使无人机控制系统能够提升自身容错能力。








4 结束语
