基于一维卷积神经网络的圆柱滚子轴承保持架故障诊断
2021-10-18郑一珍牛蔺楷熊晓燕祁宏伟马晓雄
郑一珍, 牛蔺楷,2, 熊晓燕,2, 祁宏伟, 马晓雄
(1.太原理工大学 机械与运载工程学院,太原 030024;2.太原理工大学 新型传感器与智能控制教育部重点实验室,太原 030024)
滚动轴承作为基础和关键部件,是高端制造装备、智能设备、高科技船舶装备、先进轨道交通等重点领域的关键部件[1]。因此,滚动轴承的性能在很大程度上对整个机械系统或部件的性能起决定作用。
随着生产制造装备朝着规模化、高速化、整体化和智能化的方向发展[2],滚动轴承的工作环境越来越苛刻,保持架作为其重要的构成部分,发生故障的概率也越来越高。一旦保持架出现故障,其他部分也会出现故障,致使故障原因难以分析。而在轴承工作的过程中,随着保持架早期故障逐步扩展,最终导致保持架断裂失效,往往会造成灾难性事故,危害巨大。为了维持设备安全稳定的运行,对轴承保持架的健康状况必需进行实时监控。
考虑到保持架的早期故障难以直接观察,保持架故障振动信号存在无冲击特性、非平稳性和故障特征难以提取的问题,同时保持架故障的频率特征受很多因素影响,目前还没有比较定性的公式或特征指标来说明其故障。故针对目前研究中普遍采用的振动信号分析法,通过分析故障振动信号特性和数据处理算法提取保持架信号时频特征难以判别保持架故障形式及其损伤程度[3]。近年来,伴随机器学习理论应用的不断推进,智能故障诊断算法已逐步发展成诊断研究方面的重要环节[4],其算法结构通常包括3个部分,即特征提取、特征选择和模式分类。原始时域振动信号中蕴含丰富的故障状态信息可用于轴承故障诊断,通过特征提取可获取振动信号中与故障状态相关的特征量用于后续的模式分类,现有方法主要依靠人工耗时的数据预处理来提取特征,例如傅里叶变换[5]、时、频域统计特征分析[6]、小波变换[7]和时频图特征分析[8]等,继而通过特征选择进一步筛选特征,去除其中无关和亢余的特征量,以达到缩减特征数量,提升算法精准度,削减运算时间的效果。常用方法包括主成分分析法[9]、LLTSA(linear local tangent space alignment)算法[10]、流形学习[11]等算法。模式分类是将选择后的典型特征输入相应分类器训练以实现故障模式识别,近年来,诸如支持向量机[12]、KNN(K-nearest neighbor)算法[13]和BP(back propagation)算法[14]之类的机器学习方法被广泛用作模式识别分类器用于故障诊断研究。之前也有学者对智能故障诊断算法在保持架故障诊断中进行研究应用。李辉等[15]采用共振解调法分析保持架故障振动信号,通过外孤谱变换识别保持架故障。汤芳等通过小波包分解保持架故障信号得到小波包系数并求解小波包系数熵,然后将熵值作为提取特征指标输入SVM(support vector machine)以识别故障损伤程度。上述传统的数据处理和智能故障诊断算法已经相对成熟,由于其应用范围广泛,特征提取和选择过程易于实现并且通过合理配置分类器各项参数,可满足部分故障诊断的识别要求。然而综合来讲,传统故障诊断技术的科学性、实用性及通用性还不够,特征提取依赖于实践中总结的经验和专家知识,对操作者的技术要求高,实施难度较大。在一个机械系统中表现很好的特征提取算法与分类器组合,当装置变化时,不能保证其能否继续保持高识别率,即算法组合的通用性不能保证;同时机械系统运行过程中其负载和转速不断发生变化,致使某一负载和转速下提取的特征指标在其他负载和转速状况下会出现偏差,极大限制了故障诊断模型的泛化性能和鲁棒性,以致不能很好的实现故障识别。
近年来,随着深度学习理论的快速发展,各领域利用深度学习网络结构配合非线性激活函数实现对输入信号的数据特征自动提取和降维,避免了耗时的人工提取特征和对专家知识的依赖。特别是卷积神经网络(convolutional neural networks, CNN)作为人工神经网络的一个主要结构部分[16],在图像识别方面得到广泛的应用。一些研究表明,CNN也可直接应用于原始时间语音信号进行语音识别[17]。在这些研究的启发下,近年来在故障诊断领域中也出现了部分关于CNN 的研究。Chen等[18]提出将齿轮箱故障振动信号的时频特征输入二维CNN网络,得到基于CNN的齿轮故障诊断算法模型。袁建虎等[19]提出将轴承故障加速度信号的小波时频图作为特征图输入CNN模型,以实现轴承故障诊断。
虽然上述研究都引入CNN模型用于故障诊断,但模型中仍使用人工提取特征作为输入,并未充分发挥CNN强大的特征学习能力。同时,考虑到目前故障诊断算法研究大都针对齿轮和轴承的滚动体和内外圈故障,针对轴承保持架故障识别的研究较少。因此为充分保留一维时序振动信号各时刻数据点间的相关性和原始数据时域特征。本文提出了基于一维CNN的新型圆柱滚子轴承保持架故障诊断算法,该算法不涉及任何费时的人工特征提取,以原始时域振动信号作为输入,模型通过直接作用于输入信号进行学习训练,充分发挥CNN强大的特征学习能力,以实现模型分类预测结果对应于输入信号的故障类别。
1 一维CNN特征提取算法
CNN是具有深度结构的前馈神经网络,网络通过设置多级滤波器对输入信号执行反复卷积与池化运算,达到数据特征自动提取和降维的目的,得到具有旋转和平移不变性的分类特征。CNN中卷积层与相邻层之间采用局部连接和权值共享的方式进行运算,同时使用池化层大幅缩减输入维度,极大简化了模型训练和过程计算,提高网络简易程度,避免发生过拟合。并且CNN具有的表征学习能力,随网络层数加深不断增强,使网络训练可以得到更好的鲁棒特征。
CNN是一个具有多层神经结构的网络,由多个滤波器层和一个分类器层组成。滤波器层包含卷积层和池化层两种不同类型的网络结构,模型通过交替利用滤波器层来提取数据特征,分类器层是一个多层感知器,由若干个全连接层组成,不同类型层的功能描述如下。卷积层采用卷积核权重共享对输入进行卷积操作,然后通过激活函数提取输入在局部区域的特征矩阵。卷积运算过程为
(1)

卷积运算后,CNN通常使用非线性修正单元函数f(x)=max{0,x}作为模型的激励函数,以加速CNN的收敛,防止模型过拟合。同时在CNN结构中,通常在卷积层之后添加池化层进行下采样操作,以减小特征空间大小,减少网络参数数量。实际使用中最常见的池化方式是最大池化,通过对特征矩阵执行提取局部极值操作,可以在减少参数的同时获得具有位移不变性的特征。最大池化运算过程为
(2)

CNN的输出层通过对滤波器层得到的输出进行全连接运算得到一维数组,之后使用Softmax函数进行模式识别输出,Softmax函数运算过程如下
(3)
式中:j为k中的某个分类;zj为该分类的值。
考虑到不同故障类型所具有的不同周期特性,尤其是保持架故障振动信号的周期时间间隔较长。故在某采频下故障振动信号覆盖完整的周期需要几百乃至几千个数据点,此时,若CNN使用较大的卷积核,则不利于进一步增加模型深度以提取鲁棒特征,同时也会导致模型计算量暴增耗损更昂贵的计算资源。若CNN使用较小的卷积核,则算法运行时间会随卷积运算次数增加而显著增多。因此为权衡运算速度和有效进行特征提取,本研究对输入数据按一定比例以时间间隔进行分割得到数据点数适宜的输入数据样本以保证运算速度,同时模型采用小卷积核对输入数据进行有效特征提取。
2 CNN-BCFD智能故障诊断算法
2.1 CNN-BCFD模型概述
考虑到保持架故障振动信号特征微弱且易被调制呈现出典型的非线性与非平稳特性,同时随着轴承设备不同部件间相互关联以及耦合程度不断加深导致保持架故障诊断呈现出不确定性、复杂性和多测点下时间尺度存储数据累积表现出的大数据特性。所以如何选取适合故障状态的信号处理与特征提取方法就成了有效进行保持架故障诊断的前提。由于故障诊断的核心在于寻找特定的故障内在模式表达,进而实现对故障的识别诊断。而基于CNN的诊断方法非常擅长处理海量数据,其主要通过卷积层、非线性激活函数、池化层等基本组件的有机结合即可实现由原始时域振动信号输入空间到故障模式表征特征域的映射,且无需对输入数据进行任何矢量化处理,从而保留了保持架时序振动信号相邻点间的相关性。并且模型通过结合非线性激活函数拾取保持架故障状态隐藏的非线性特征表达和数据内部的拓扑结构特征,同时池化层的使用可以使得提取得到的抽象故障特征表达更关注特征本身而非具体的特征位置,从而获得更加鲁棒的泛化特征表达组合。最后,通过分类器利用监督学习对特征空间进行划分,以将特征空间映射到状态空间,从而实现保持架故障的检测、诊断与模式匹配。
目前虽然已经引入CNN模型用于故障诊断,但模型中大都以信号处理进行人工提取特征作为输入,并未充分发挥CNN强大的特征学习能力,同时受样本数量影响模型结构简单,不利于进一步增加模型深度以提取鲁棒特征,且算法的通用性不能保证。因此,本文提出一种基于CNN的轴承保持架故障诊断算法(convolutional neural network-bearing cage’s fault diagnosis,CNN-BCFD)。
本研究所提出的CNN模型架构,如图1所示。它由输入层,两个滤波器层和输出层组成。输入层对信号按照一定比例以时间间隔进行分割,得到经过标准化预处理的轴承保持架时域振动信号的样本集合。两个滤波器层实现数据信号的自适应特征提取和特征降维,得到鲁棒的非线性特征。从图1可知,随着层数增加,各层深度增大,相应的特征矩阵宽度减小。输出层由全局平均池化层和全连接层组成,全局平均池化层对上一层特征向量执行“铺平”操作实现三轴加速度振动信号故障特征融合,以实现提取保持架故障鲁棒特征,减少模型训练参数和过程计算量,避免发生过拟合。全连接层相邻两层之间所有结点相互连接,且其神经元个数与保持架故障类别数目相同,最后在输出层中利用Softmax函数实现目标类别输出。

图1 CNN-BCFD模型结构
2.2 数据预处理
数据预处理过程主要包括:对原始时域振动信号使用数据窗口移位技术进行数据增强,生成训练和测试样本集合,并采用“独热”的编码方式对故障类型进行标签标记,然后对训练和测试集合中所有数据进行标准化处理。
2.2.1 数据增强
实现深度学习故障诊断的高识别率需要有大量的数据样本作为支撑,同时为保留滚动轴承保持架故障振动信号相邻时序信号间的相关性。本文提出了数据窗口移位技术进行有重叠样本分割实现数据增强。分割方式,如图2所示。该方法可以保留时序信号间具有的连续性和周期性,避免等距离采样难以表达信号全部信息特性的问题,同时极大增加了输入网络训练的样本总量,使模型的强大学习能力得到发挥。
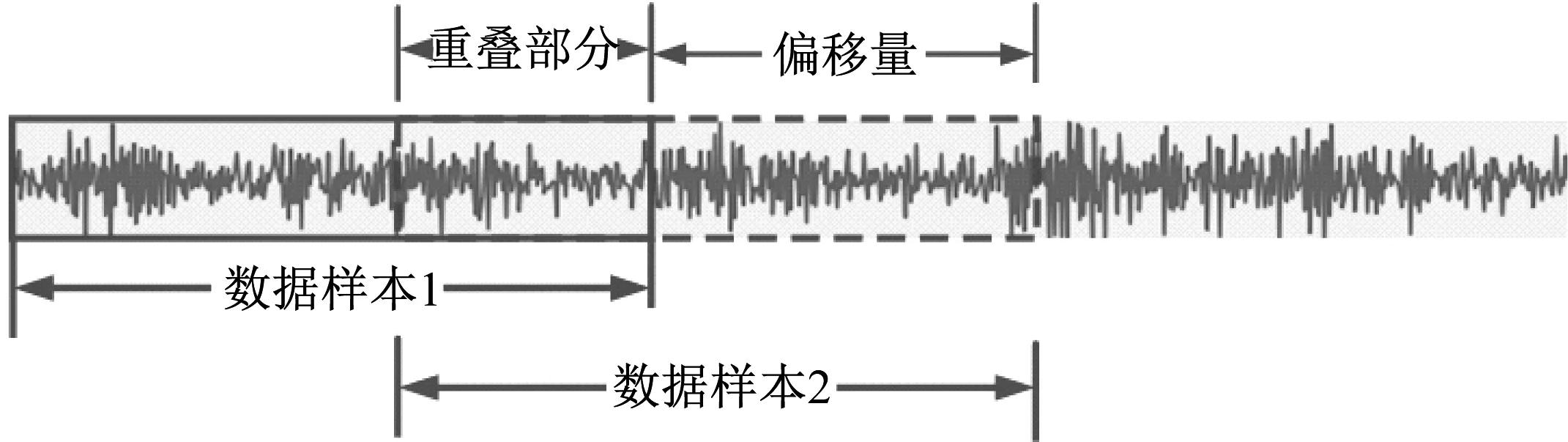
图2 重叠样本分割
从图2可知,若故障状态下振动信号数据总长度为L,样本的长度为l,振动信号以某一偏移量m进行分割,则重叠部分数据长度为l-m。
(1) 当前信号长度下可分割样本数量D
(4)
数据增强后样本集扩充倍数β
(5)
式中,[·]为向下取整运算符。
(2) 第i个分割样本在振动信号数据中的位置xi
xi=L[(i-1)×m+1∶(i-1)×m+l],
i∈[1,D]
(6)
式中,xi为分割样本,通过设置相应的偏移量m可以得到不同规模的样本数据集合。
2.2.2 数据标准化
在深度学习中为提升模型收敛速度和精度,通常对样本集合进行标准化预处理,其标准化公式为
(7)

2.3 CNN-BCFD模型训练
数据集预处理后,模型使用收敛速度较快且收敛过程稳定的Adam优化器[20]进行训练。Adam优化器具有很高的计算效率和较低的内存需求,适用于处理非平稳信号和多参数模型训练。同时本研究模型使用Softmax函数输出故障类型概率分布与目标故障类型概率分布之间的交叉熵作为代价函数,交叉熵计算公式为

(8)
式中:p(x)为目标类别概率分布;q(x)为模型预测结果概率分布。
为消除模型训练过拟合的风险,训练过程中引入了Dropout正则化手段。即在每次迭代训练过程中任意挑选一定比值的神经元进行临时隐藏,然后再进行该次迭代中神经网络的训练和优化,如此直至训练结束。同时,网络中还引入Batch normalization批标准化处理,通过在CNN各层之间加上将神经元权重调成标准正态分布的正则化层,对权重进行拉伸操作等价于对特征进行拉伸调整,可以让每一层的训练都从相似的起点出发,从而加速神经网络收敛,简化超参数调节,消除过拟合。模型训练基本步骤如下。
步骤1输入:步长ε,矩估计的指数衰减速率ρ1和ρ2,数值稳定常数δ=1×10-8,初始化参数θ,初始化一阶和二阶矩变量s=0,r=0,初始化时间步t=0。
步骤2While:没有达到训练终止条件
步骤3do:从训练集中随机选择包含m个样本{x1,…,xi,…,xm}的小批量,对应目标为yi。

步骤5更新有偏一阶矩估计:s←ρ1s+(1-ρ1)g。
步骤6更新有偏二阶矩估计:r←ρ2r+(1-ρ2)g⊙g。



3 试验
3.1 试验数据说明
为充分训练CNN模型,本研究准备了大量的训练样本以验证算法的有效性。考虑到常见的轴承保持架故障形式有裂纹,断裂,塑性变形和磨损,且一般以载荷不大的高频瞬时碰撞产生的裂纹和断裂故障为主,故本研究以圆柱滚子轴承保持架裂纹和断裂故障为例,试验用轴承为NSK公司生产型号为NF204EM的圆柱滚子轴承,采用规格0.18 mm的钼丝使用线切割加工技术在保持架上加工裂纹和断裂缺陷。其中,裂纹故障深度尺寸分别为0.50 mm,1.00 mm,1.50 mm,2.00 mm,2.50 mm,断裂故障尺寸为3.25 mm,因此再加上保持架正常状况的轴承,如图3所示。试验共含有7种不同保持架故障状况的轴承。试验原始数据通过旋转机械故障试验平台采集,如图4所示。在远离电机一侧的轴承座上安装不同故障程度的保持架裂纹和断裂故障轴承,然后在动力源驱使下使用三轴加速度传感器以5 kHz的采样频率采集轴承座处的故障信号,典型Z轴振动信号如图5所示。并在同一采样频率分别采集空载、2 kg和4 kg负载下不同保持架故障加速度信号用于负载泛化试验分析。同时分别采集不同保持架故障在600 r/min,1 800 r/min,3 000 r/min转速时的加速度信号用于故障特征鲁棒性能分析。试验中,对不同负载和转速下的振动信号使用数据窗口移位技术进行数据增强,每个样本包含2 500个数据点,同一工况下7种不同保持架故障样本数据构成一个数据集。每类样本按照数据窗口单次移动15个数据点进行数据分割实现样本集扩容,并对每类保持架故障随机选择80%的样本数据用于训练,20%的样本数据用于测试。所以扩容后每个数据集分别包含336 000个训练样本和84 000个测试样本,详细样本说明如表1所示。

表1 试验样本组成

图3 轴承保持架裂纹和断裂故障

图4 轴承保持架故障试验台

图5 各故障状态典型振动信号
3.2 CNN-BCFD模型参数选择
构建一维CNN模型过程中,通过选择合适的参数可以在确保较高识别率的同时减少模型训练时间,研究表明优化算法类型、滤波器层中卷积核数目和大小以及池化方式和大小等参数的选择都会影响模型训练速度和故障识别率[21]。根据Lu等[22]提出的建议,模型按照后一卷积层中卷积核个数不超过前一层卷积核数目一半的方式设置。通过试验研究不同卷积核数目配置对模型训练集和测试集故障识别率以及模型训练时间的影响,每组参数分别进行20次试验,并以故障诊断率和训练时间的均值作为参考的评价标准,最终结果如表2所示。随卷积核数目增加,模型训练集识别率和训练时间也随之增加,综合分析,当模型选择卷积核数目配置(64,32)时可以获得较高的训练集和测试集故障识别率,且训练耗时较少。模型其他参数通过网格搜索法选择确定,最终研究提出的CNN-BCFD模型由两个卷积层,两个最大池化层以及一个全局平均池化层和一个全连接层构成,模型参数设置如表3所示。

表2 不同卷积核数目配置的识别率结果

表3 CNN-BCFD模型参数
3.3 试验结果
模型使用Google的Tensorflow和keras工具箱搭建,试验平台为windows10+anaconda,所用的PC配置为Corei7-7700,显卡采用11G NVIDIA RTX 2080ti。
为避免模型训练过拟合问题,提高训练模型的泛化性能。算法引入了Early Stopping机制进行训练时间和泛化性能之间的权衡以降低每个参数维度的有效规模,训练过程中通过设置合适的训练终止条件,计算模型在测试集上的表现,适时终止训练过程得到最终的模型参数输出,避免继续训练导致的过拟合问题。试验数据集选取空载下7种保持架故障振动信号,考虑到网络权值随机初始化,为保证试验结果的可靠性,模型实施20次试验以获取识别率均值。试验结果如图6所示。图6中accuracy和loss分别为训练集和测试集样本的故障识别率和损失函数值。经过8次迭代后,损失函数值指标loss为0.03,测试集识别率指标accuracy达到了99.50%。与训练集结果近似,表明模型训练结果良好,未导致过拟合。

图6 训练集和测试集样本故障识别率和损失函数值
同时研究引入了混淆矩阵展示训练模型对测试集各类故障样本的识别效果,试验结果如图7所示。在保持架裂纹故障深度为0.50 mm和3.25 mm断裂故障时诊断识别率保持在约99.2%,其余4种保持架故障诊断识别率都大于99.7%,尤其是2.00 mm裂纹故障诊断识别率达99.96%。试验结果表明本研究提出的算法具备较高的故障诊断率。

图7 测试集样本识别结果
为进一步说明模型对于时域振动信号特征的自适应学习能力,研究还引入t-SNE算法提取CNN-BCFD各层级特征的前三个维度元素进行可视化分析,试验结果如图8所示。模型输入层中各样本类别混杂无法进行区分,经过第一个滤波器层提取特征后,样本可分性明显提高,大部分样本在区域内聚集分布,随着模型深度增加,经过第二个滤波器层特征提取后,各样本聚集程度更高,最后,在全局平均池化层中得到分离度很高的保持架故障状态特征,试验结果表明,CNN-BCFD可以从原始信号中提取有效特征以实现保持架故障诊断。

图8 各层级特征的t-SNE可视化分析
3.4 变载泛化性能试验
上述空载数据集下保持架故障诊断试验展示了本研究算法优良的识别性能,同时研究分别进行了同等规模数据集下,2 kg和4 kg负载故障信号的诊断试验,每个数据集下分别进行20次重复试验,以求取识别率平均值,得到混淆矩阵表示的试验结果如图9(a)、图9(b)、图9(c)所示。3种负载下的保持架故障整体识别率分别为99.56%,99.55%和99.65%,结果表明,通过训练算法可以有效识别不同负载下的保持架故障。考虑到实际设备中负载随时可能发生变化,为验证算法在变负载工况下的有效性。研究对CNN-BCFD模型的泛化性能进行试验分析,为使模型提取的特征能够消除负载变化的影响,模型采用包含不同负载工况的故障信号样本进行训练,因此试验在同等规模数据集下同时采用空载、2 kg负载和4 kg负载下7种保持架故障样本进行模型训练和测试,其中每种负载下样本各占总样本数的1/3,经过20次重复试验,测试结果如图9(d)所示。试验结果表明不同负载下的保持架故障整体识别率结果为99.57%,仍保持了较高的诊断识别率,验证了CNN-BCFD模型具有良好的泛化性能,适用于实际设备复杂负载工况下的故障诊断。

(a) 空载下试验结果
3.5 变速鲁棒性能试验
3.4节诊断试验验证了算法在变负载工况下的有效性,考虑到在实际设备中轴承转速也可能会发生变化,因此研究分别进行了同等规模数据集下,600 r/min,1 800 r/min和3 000 r/min转速下保持架故障信号的诊断试验,每个数据集分别进行20次重复试验,求取识别率平均值,得到混淆矩阵表示的试验结果如图10(a)、图10(b)、图10(c)所示。3种不同转速下保持架故障整体识别率分别为99.56%,99.57%和99.58%,结果表明通过模型训练可以有效识别不同转速下的保持架故障。同时为验证模型在变转速工况下故障识别的有效性。研究对CNN-BCFD模型的鲁棒性能进行试验分析,为使模型提取的特征能够排除转速变化的影响,模型采用包含不同转速工况的故障信号样本进行训练,因此试验同时采用600 r/min,1 800 r/min和3 000 r/min转速下的保持架故障信号进行模型训练和测试,其中每个转速下样本各占总样本数的1/3,建立与3.4节试验同等规模的数据集并输入模型进行训练,经过20次重复试验,测试结果如图10(d)所示。试验结果表明输入不同转速下的保持架故障样本训练得到的模型,仍然能够很好的识别出变转速工况下的保持架故障类型,验证了CNN-BCFD模型具有良好的鲁棒性能,适用于实际设备变转速工况下的故障诊断。

(a) 600 r/min下试验结果
3.6 算法对比试验
为了比较本研究算法与人工特征提取加分类器组合算法及其他深度学习方法的诊断效果,通过试验对比本研究方法与提取小波包系数熵加支持向量机分类算法、反向传播神经网络(back propagation neural network, BPNN)和堆叠式自动编码器(stacked auto-encoder,SAE)的识别性能。各对比算法具体参数设置如下:①SVM通过一对多的方法建立多个支持向量机组成多分类器,然后将小波包分解保持架故障信号得到的熵值作为提取特征指标输入SVM以识别故障损伤程度;②BPNN通过将故障振动信号经验模态分解提取的时域特征作为输入,建立了含有3个隐藏层的训练网络,并且模型各层神经元的数目都为10;③SAE模型建立了层级参数结构为2500-1024-512-256-100-7的6层深度学习网络,配合ReLU激活函数进行非线性运算,同时使用Adam优化器进行参数更新,学习率数值设定为0.1。最终通过试验对比4种智能故障诊断算法在3种不同载荷状况下的保持架故障识别率,每组分别进行20次试验,并获取故障识别率均值作为评价标准,对比结果如表4所示。

表4 算法对比试验结果识别率
试验结果表明本研究算法具有高达99%以上的故障识别率,其结果明显优于其余3种对比算法。尤其是基于浅层网络结构的BPNN算法在故障识别率上较其他算法有较大差距,而SVM算法的诊断性能尽管表现也相当好,但考虑到其需要选择合适的小波基函数求取小波包系数,其特征选择可能因不同的数据集而不同,所以在选择小波包基函数方法时存在问题。且信号时频转换过程比较耗时,再加上SVM分类器本身具有的浅层网络结构,限制了其故障诊断能力的进一步提高。同时SAE深度学习算法虽然也实现了较高的故障识别率,但考虑到其隐藏层数目和神经元个数都较多,从而导致模型计算量暴增耗损更昂贵的计算资源,极大增加了模型的训练时间。对比下来本研究算法发掘了深度学习强大的非线性特征学习能力,数据集可以在不进行任何预处理的情况下输入到CNN模型中,无需任何人工数据处理,模型直接从训练样本中学习,通过训练滤波器层自动提取合适的数据集特征,并输入分类器进行分类,由“端到端”通过一个网络模型完成特征提取、特征降维与模式分类的全套过程。同时其余3种对比算法在不同载荷数据集测试样本上的标准偏差至少是本研究算法的3倍,这说明本研究算法比其他算法更稳定。考虑到本研究算法的故障诊断率波动较小,试验结果进一步表明本研究算法具有优良的泛化能力,同时模型提取得到的特征具有优良的鲁棒性,进一步验证了本研究算法应用于实际轴承设备保持架故障诊断的可行性。
3.7 其他轴承故障诊断试验
同时为验证本研究算法在其他轴承故障类型下的识别效果,研究采用凯斯西储大学轴承故障振动数据库进行相关的诊断研究,试验通过加速度传感器以12 kHz的采样频率采集750 W负载下电机驱动端轴承正常、内圈故障、外圈故障和滚动体故障4种状态的振动信号数据,并在不同状态下分别选择2 500个样本构建模型数据集,其中每个样本含有1 024个数据点,所以试验数据集共含有10 000个样本,继而对每种故障状态随机选择80%的样本用于训练,其余用于测试。最终试验数据集中含有训练样本8 000个,测试样本2 000个。同时为保证试验结果的可靠性,模型实施20次试验以获取识别率均值,最终结果如表5所示。

表5 各类轴承故障识别结果
由表5可知,本研究算法较其他算法具有最高的识别率,同时算法的稳定性也优于其他算法,进一步验证了本文模型可有效应用于各类轴承故障的识别诊断。
4 结 论
本文通过将CNN应用于一维时序振动信号,提出一种作用于原始振动信号的轴承保持架故障智能诊断算法,并试验验证了提出CNN-BCFD模型的有效性。较传统方法其主要有以下3个优点:
(1) 避免了人工特征提取;CNN作为有效的特征提取器和分类器,通过直接将原始振动信号输入模型训练可以得到最适合分类任务的特征量。
(2) 发挥了CNN“端到端”的特点;算法使用数据窗口移位技术扩大数据集规模,通过一个网络模型完成特征提取、特征降维与故障分类这一整套程序,降低了故障诊断实施的难度。
(3) 良好的泛化性能和鲁棒性;最终结果表明,即使在不同转速和负载工况下,本研究算法仍能够从轴承保持架故障振动信号中自适应地挖掘合适的故障特征表示,并以较高的识别率和良好的稳定性对故障类别进行分类。
本研究主要工作是建立轴承保持架故障智能诊断模型,考虑到模型参数设置依赖于网格搜索策略,仍然存在模型参数优化的问题,还需要进一步对所建立的模型进行参数选择算法优化设计,从而提高诊断算法的工作效率。
