基于wMPS测量刚性结构振动频率的可行性研究
2021-10-18熊春宝白洪志
熊春宝, 白洪志, 王 猛
(天津大学 建筑工程学院,天津 300072)
近年来,许多学者一直研究通过自动全站仪(robotic total stations,RTS)和全球卫星导航系统(global navigation satellite system,GNSS)等大地测量传感器监测半静态和动态大型工程结构(如高层建筑、大跨度桥梁等)的位移与变形[1-6]。这种对结构性能进行实时监测的方法,除了能及时发现结构的损伤之外,还能通过安全性能评估预测其性能进一步变化,使维护人员提前做出维护决定,这对提高结构的安全性能有着重要的意义,已经成为评定现代工程健康运行的硬性指标。但是,对于测量刚性结构(频率大于1 Hz,振幅小于1 cm)的固有参数,如人行天桥等的变形[7-10]给现阶段的测量仪器带来了巨大挑战。如:RTS无法进行并行测量,且实际采样频率只有6~7 Hz(额定采用频率10 Hz);GNSS虽能进行并行测量,但因卫星信号等内外部因素的影响导致其动态测量精度受到限制,且只能测量振幅在5 mm以上的结构振动[11],当测量刚性结构时其优势明显降低。
工作空间定位系统(workspace measurement positioning system,wMPS)是基于光电扫描的新型网络式大尺寸三维坐标测量系统,具有量程覆盖大、测量精度高、测量频率高、可实现多任务同步测量等优势,已成为当前工业界和学术界的关注热点。其中,Yang等[12]提出了具体的实现方案及标定方法,分析了系统的主要误差来源及影响;Duanmu等[13]从硬件层面对wMPS的电气结构进行了优化设计,为wMPS系统实现动态坐标测量提供了理论基础;Geng等[14]利用蒙特卡洛仿真研究了wMPS的空间测角误差,设计了系统的角度校准装置,提出测量误差的补偿方法;Xiong等[15]分析了wMPS多种典型网络布局方案与定位误差的关系,并结合wMPS特性提出了一种最优网络布局策略;Zhao等[16]建立系统动态测量误差模型,以此为基础通过多发射站间同步误差补偿和采用卡尔曼滤波模型来减小系统动态测量误差,并用试验进行了验证。
wMPS较高的测量精度和优秀的动态测量性能,使得该系统非常适合于结构的健康监测,补充RTS与GNSS在测量刚性结构固有参数时的劣势。为了验证这种可行性,采取逆向工程法进行试验,用最小二乘拟合的方法定义了X轴,通过快速傅里叶变换(fast Fourier transform,FFT)分析时间序列数据,验证wMPS测量结构固有参数的可行性,并给出可以获取振动主频率的最大值,为后续应用提供了必要基础。
1 wMPS系统测量的基本原理
wMPS系统由发射站、接收器和计算机相连。发射站由上部的转动头和下部的基座组成,如图1所示。
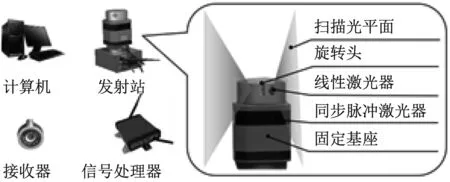
图1 wMPS测量系统
转动头上安装有两个激光器,二者在水平旋转方向上间隔90°,激光器能发射扇面状的激光,两激光扇面与水平面成60°夹角,基座上安装有一个同步脉冲激光器。系统工作时,旋转头绕着固定轴沿着逆时针方向匀速旋转,两个线性激光器在空间四周进行连续激光扫描,当转子转至初始位置时,基座上的同步脉冲发射器发射一圈同步光信号并开始计时。当任意扇形激光平面扫过接收器时,通过计数脉冲可以得到该平面从初始位置转至接收器位置时的旋转角度。利用同样的方法,当空间内的所有激光平面都扫过同一接收器时,可以建立基于多平面约束的约束方程,从而求出接收器处的坐标。

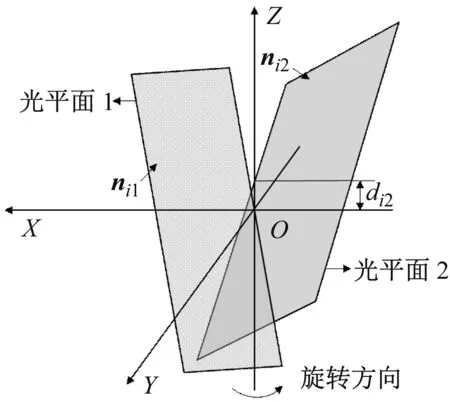
图2 测量坐标系示意图
(1)
(2)
式中,θj为两个光平面从初始位置旋转至接收器位置时的旋转角度,通过同步脉冲激光器发出的时间信息差tj和发射站的旋转周期T表示
(3)
假设把小范围的测量区域定义为整体坐标系,则对于任意的发射站i在发射站坐标系向整体坐标系的旋转矩阵为Ri,平移矩阵为Ti,则在整体坐标系下,当激光平面扫过接收器时的光平面系数可以表示为
(4)
此时对于任意发射站i,当两个光平面扫过接收器Pm(xm,ym,zm)时,在整体坐标系下的光平面方程可以表示为

(5)
在工作空间测量定位系统外参(Ri,Ti)标定完成后,当测量区域内的发射站数量i≥2时,即可利用最小二乘法对式(5)进行求解,进而得到待测接收器处的三维坐标[17-18]。
2 试验描述
试验设备主要用到wMPS与逆向工程试验台,如图3所示。图3中:wMPS选用4台最新样机(采样频率20 Hz)和一个接收器。如图4所示,逆向试验台采用曲柄连杆原理搭建,根据曲柄连杆原理可知滑块位移s不是做简谐振动,但是方程高次项的取舍与λ的取值有很大的影响,在航空发动机中,λ的取值范围在0.26~0.31,通过二项式定理展开的高于λ4项可以被舍去[19],根据这一规则,如果本次试验设计λ<1/10,则可以直接把高于λ2项都舍去,位移方程近似为s=R(1-cosα)。则通过计算机控制伺服马达按规定转速旋转使传动轴拉动滑块在直线导轨上做近似简谐振动,其中传动轮盘半径R即是简谐振动振幅。
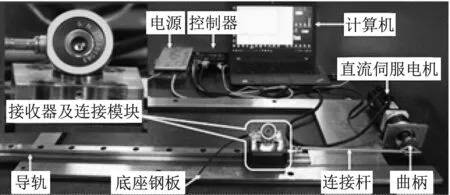
图3 试验台现场图
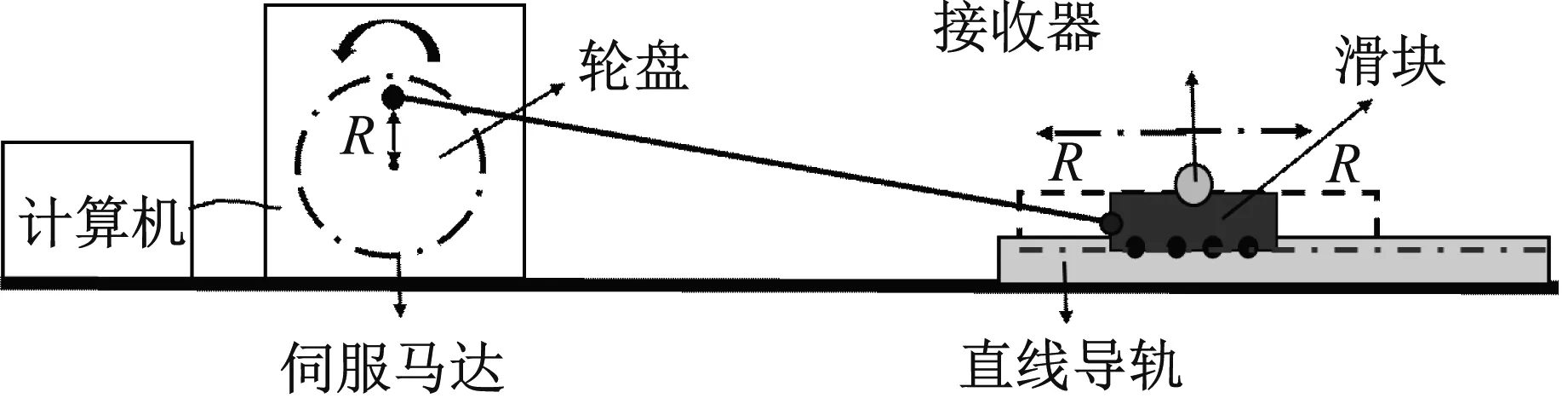
图4 试验台简化图
轮盘的半径R分别为3 mm,5 mm,10 mm,20 mm,30 mm。为确保每一测段试验中振动台没有发生位移,把试验设备安放在大理石地面上,在试验台前约3.5 m位置用4台发射站进行组网定向,并确保接收器能收到每一台发射站的信号,试验数据采集时间为2 min,按振动频率为0.5 Hz,1.0 Hz,2.0 Hz,3.0 Hz,4.0 Hz(4.0 Hz已满足测量大多数结构的固有参数)依次测量每段数据。
3 数据预处理
由于wMPS不能进行对中整平,虽然可以用其他仪器布设控制点进行标定,但考虑到试验台整平也会引入误差,因此采用最小二乘拟合的方法建立独立坐标系统。把每一测段所测数据拟合成一条直线(近似滑块运动轨迹)作为直线运动的基准线(即X轴),垂直于试验台的方向定义为Z轴,根据右手螺旋定则定义Y轴,建立空间直角坐标系。3 mm-1 Hz测段转换到新坐标系后的X,Y,Z坐标轴数据,如图5所示。从图5可知:X坐标轴数据是滑块的真实运动位移,Y,Z坐标轴数据振荡非常小,被认为是测量带来的噪声[20]。
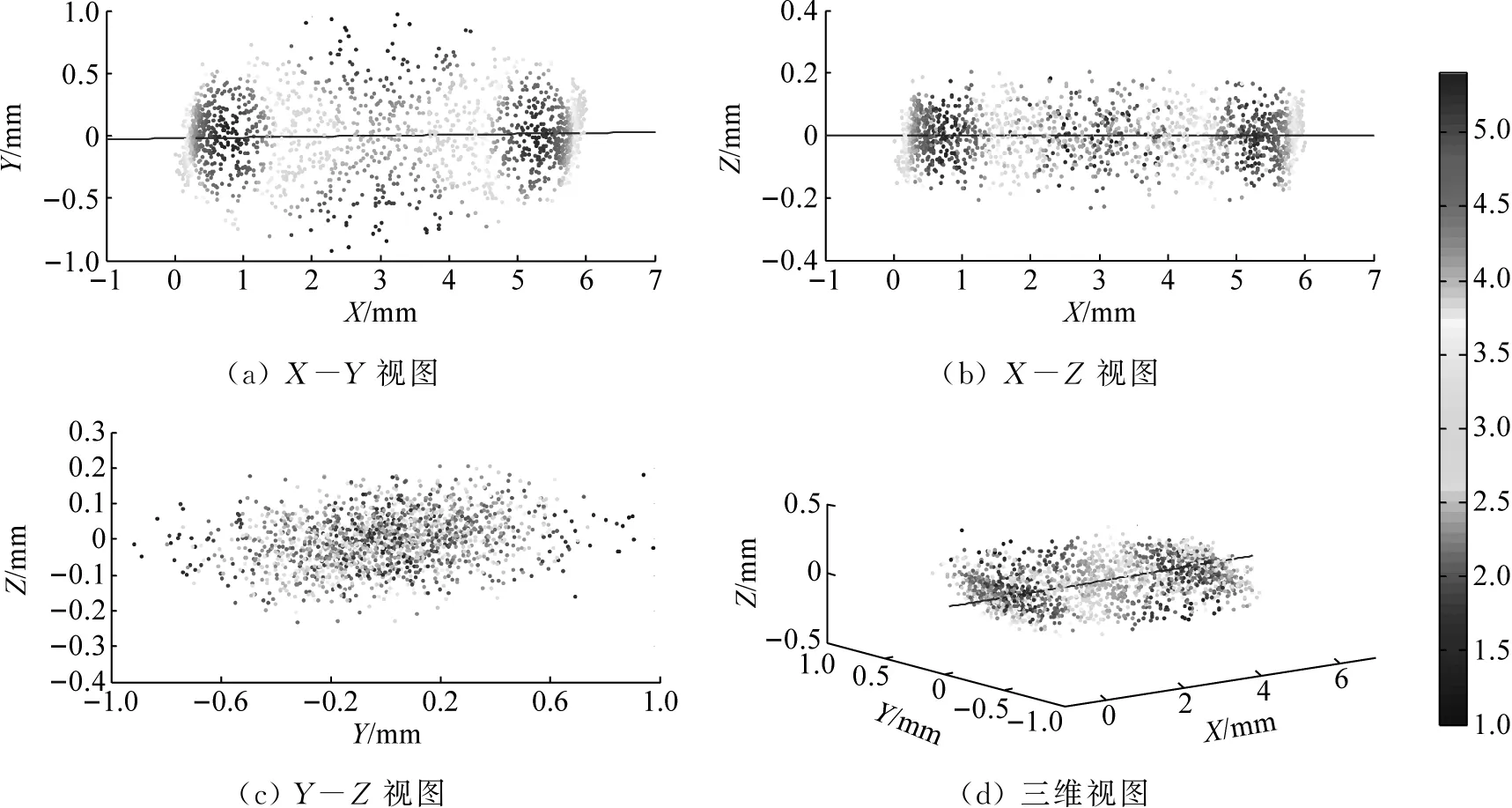
图5 3 mm-1 Hz测段坐标转换后数据
4 时间序列分析
4.1 粗差剔除
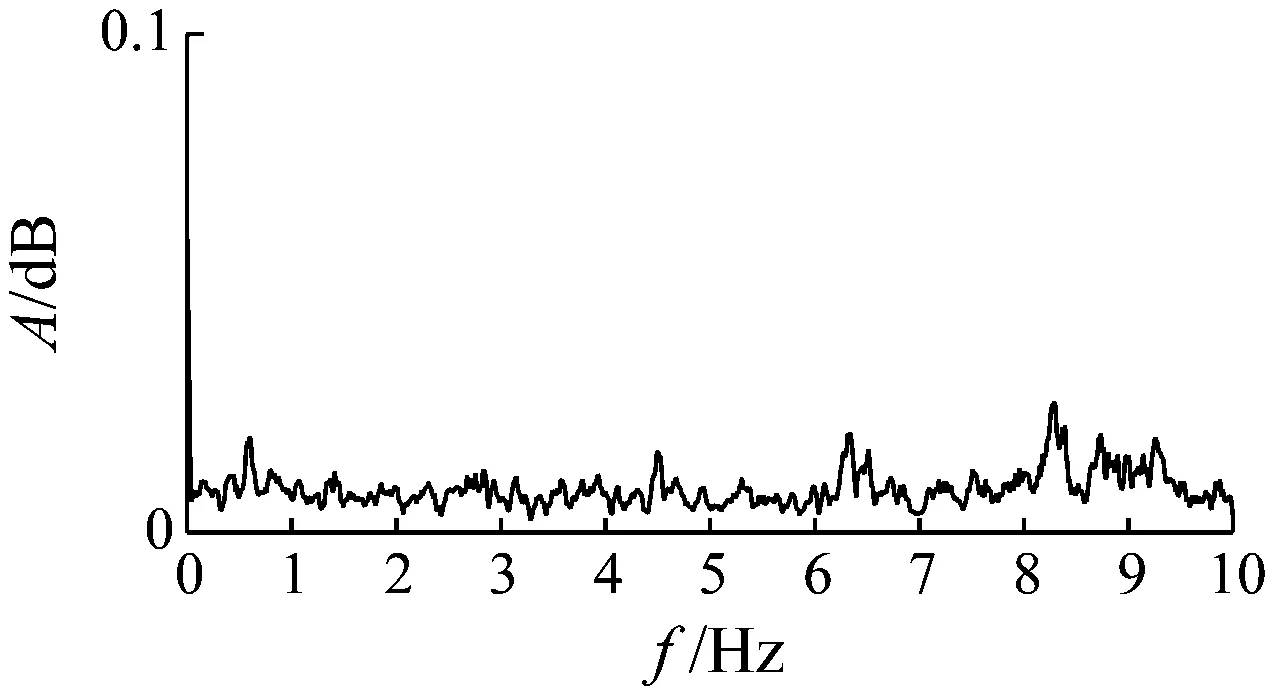
本文采用伺服马达控制轮盘旋转做简谐振动方法与Psimoulis等[21]用弹簧做介质做简谐振动方法不同,本试验能保证数据的连续性,在试验中引入的误差更少,在保证能测定wMPS性能的同时也使试验更加简单,且对测定wMPS的性能没有影响。在各测段数据中,只有测量频率较大测段有极少数测点跳动明显,这是由于受到多种偶然因素而引入的粗大误差[22],如现场突然震动或偶然反光等的影响。常用粗大误差剔除方法有目测法、均方根法、中值滤波法等,本文采用目测法剔除并进行插值,对结果分析不会产生影响。沿着Y轴测量的时间序列光谱分析,结果如图6所示。由于其表现为测量白噪声,因此不再深入研究。
(a) 1.0 Hz
4.2 振幅误差分析
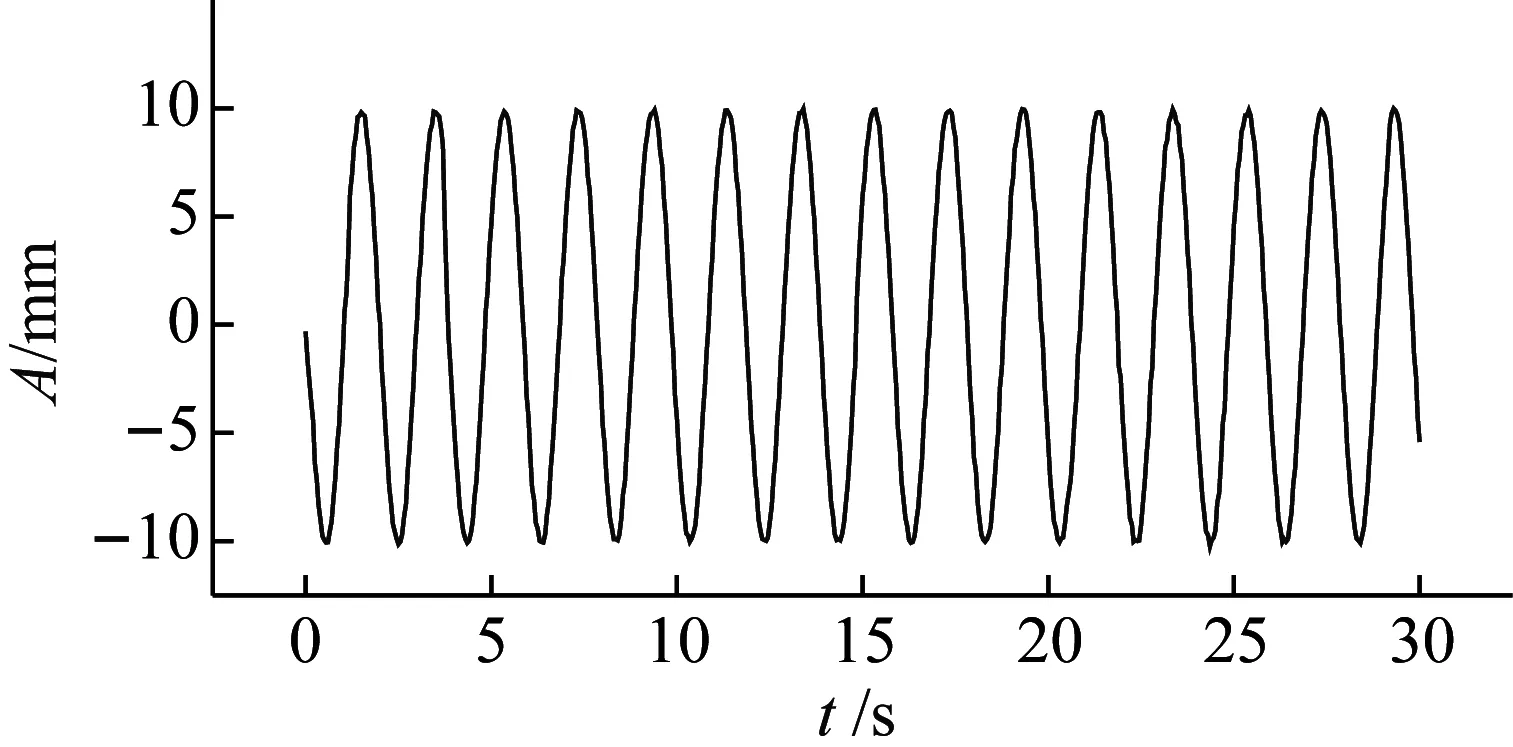
主要通过实测振幅与真实振幅做比较来评定测量的准确性,真实的振幅是每一个轮盘的半径(设计值)。通过提取实测波峰和波谷的值与真实的振幅做比较,10 mm振幅0.5~4.0 Hz各测段振动位移,如图7所示。所测段振幅绝对偏差与中误差,如表1所示。可以看出:偏差值在(0.05±0.06) mm~(3.28±4.40) mm,误差规律是随着振幅和频率的增大而增加,与Psimoulis等研究的评定RTS误差规律相似,但绝对偏差值比RTS评定的值小很多。图8更直观的展示其误差分布情况,可以直观的看出当振幅在3 mm时,在4.0 Hz振动的振幅绝对偏差依然在亚毫米以内。
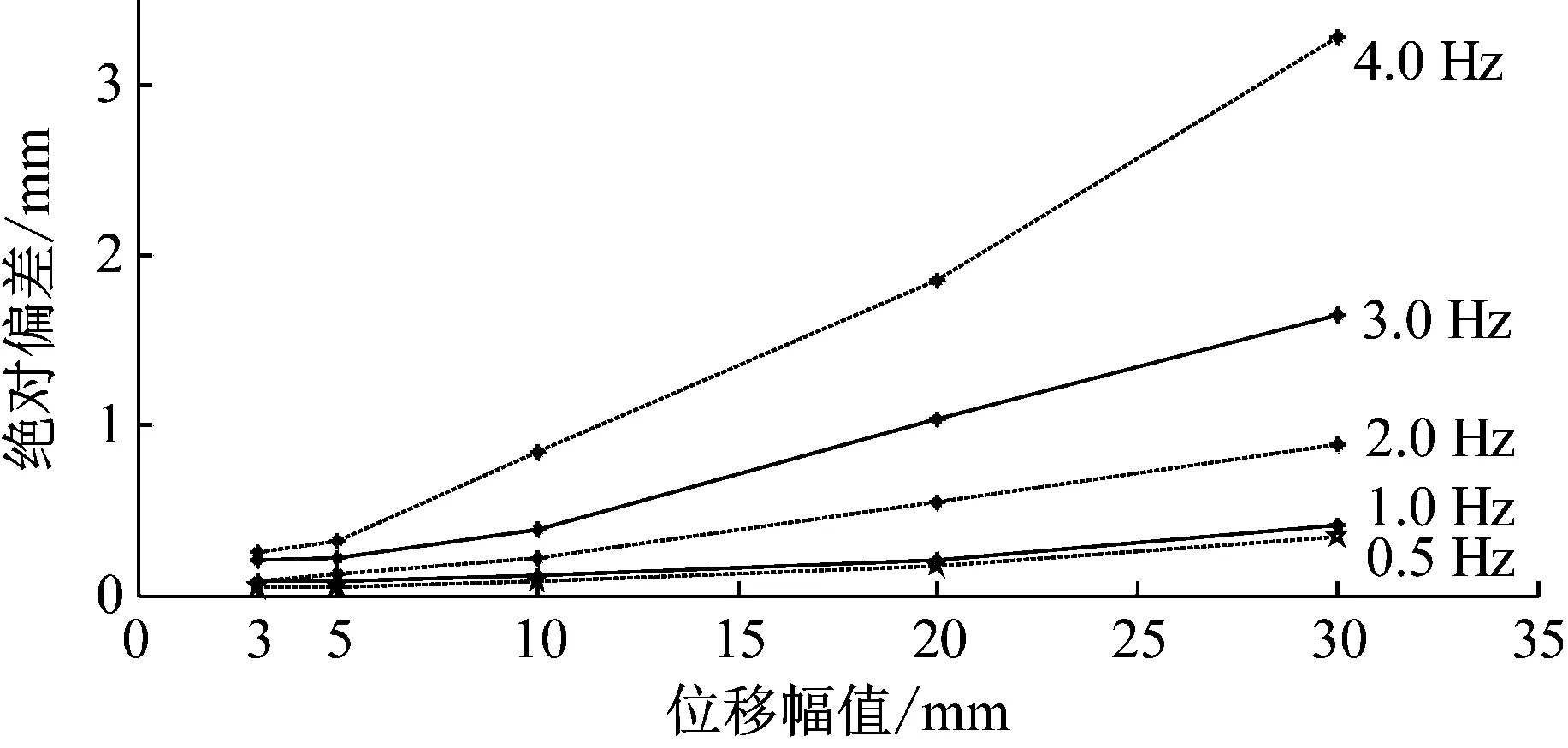
图8 不同测段振幅绝对偏差直观图
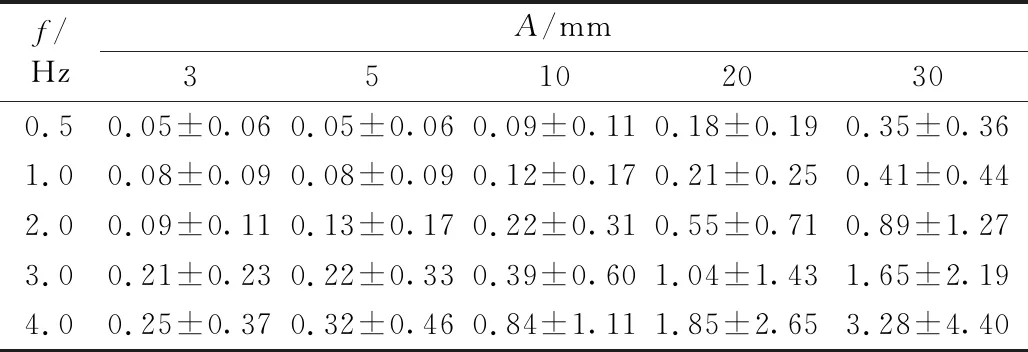
表1 不同测段振幅绝对偏差
(a) 0.5 Hz
4.3 固有频率提取
利用FFT方法提取各测段数据频率,所有测段的计算结果,如表2所示。10 mm振幅从0.5~4.0 Hz各测段获取的时间序列分析结果,如图9所示。图9中小峰值振幅的增大反映了观测中信噪比的降低。从表2可知:从0.5~4.0 Hz各测段都可以准确获取主频率值,最大偏差小于4.0%,3 mm,5 mm位移的计算结果基本相同,当振幅为30 mm时,依然可以测出4.0 Hz的频率,从此得出,wMPS可以在振幅为3~10 mm时获取到4.0 Hz频率,满足测量刚性结构的固有参数的要求。

(a) 0.5 Hz
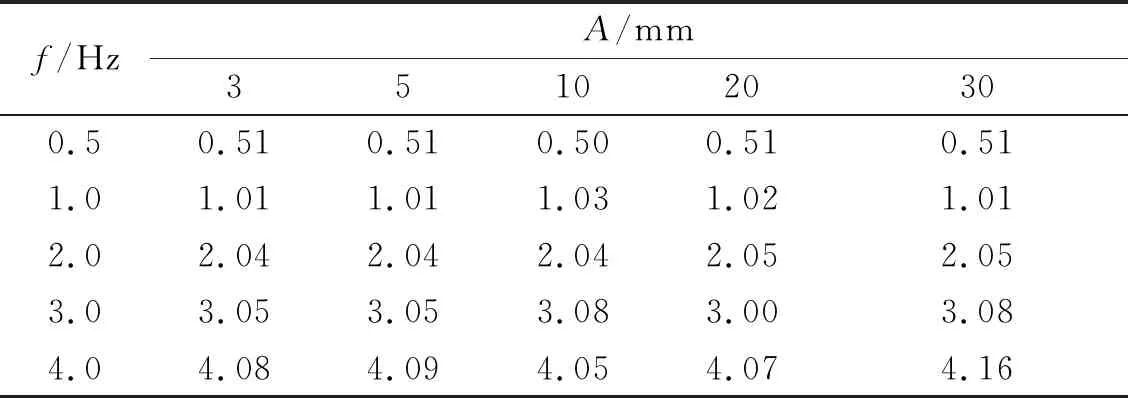
表2 各测段实测振动频率值
5 对比试验与分析
为进一步分析wMPS测量刚性结构固有参数的可行性,如图10所示,采用三星座(全球定位系统、格洛纳斯、北斗卫星导航系统)组合GNSS-RTK(global navigation satellite system-real-time kinematic)(水平精度8 mm+1 ppm,垂直精度15 mm+1 ppm)在天津大学校内宽阔场地进行对比试验。由于条件的限制,基准站采用Trimble R12,移动站采用Trimble R10,移动站采样频率设置为20 Hz,基准站与移动站距离29.5 m,卫星截止高度角设置为10°,整个试验过程中接收卫星数不少于14颗。
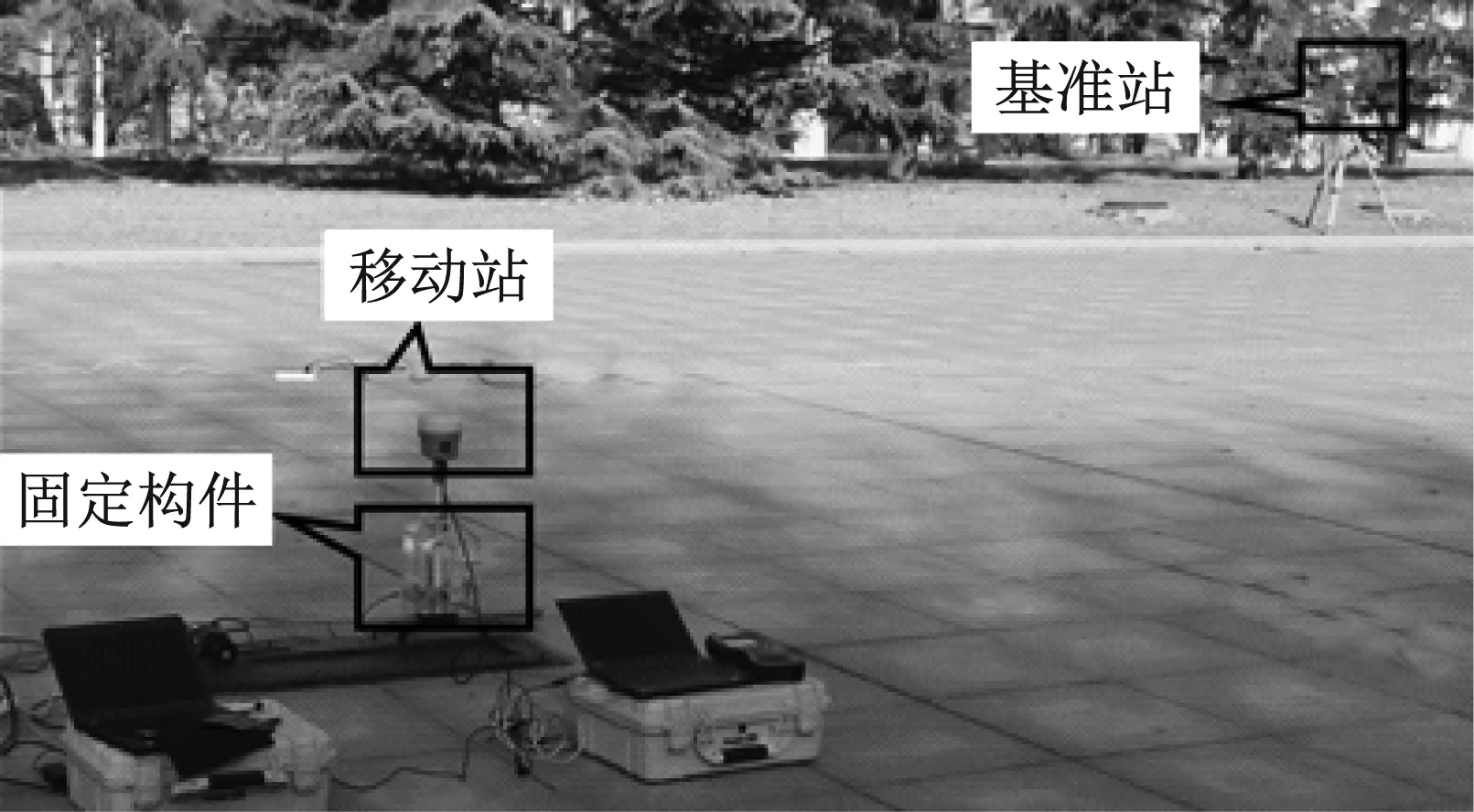
图10 试验现场图
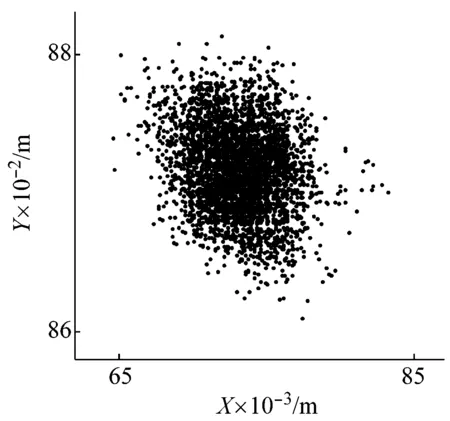
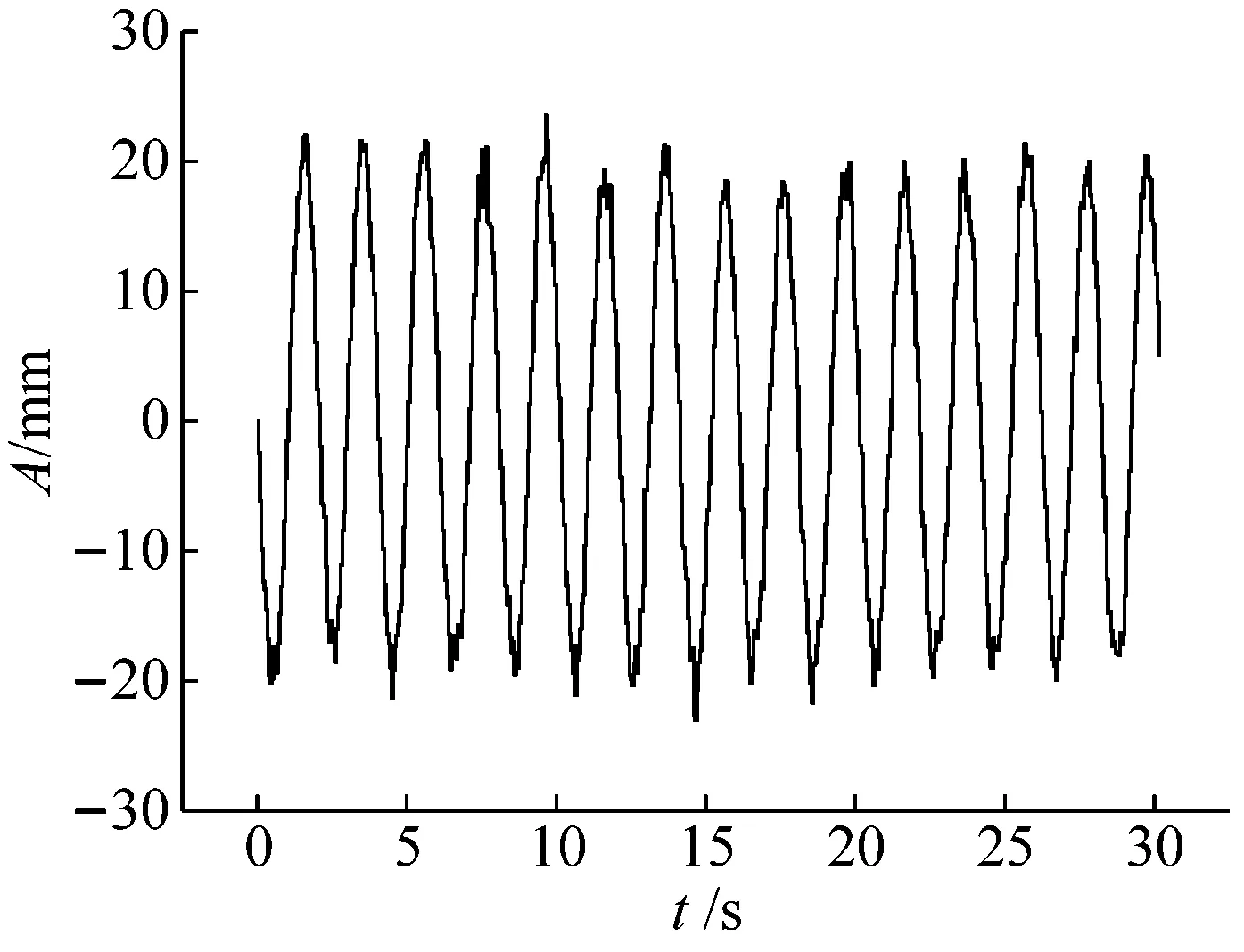
由于GNSS-RTK竖直方向精度远低于水平方向精度,因此只对水平方向进行测试。通过调节底座板使导轨处于水平状态,并进行数据采集。图11为1 Hz时3 mm,5 mm和10 mm振幅点云图。从图11可知:当振幅为3 mm和5 mm时很难识别出滑块运动位移,主要是由于振动幅值小于仪器水平精度,当振幅为10 mm时,可以明显识别出滑块运动轨迹,采用第3章数据处理中的方法定义坐标系,把每一测段所测X,Y数据拟合成一条直线作为运动的基准线,计算振幅为10 mm,20 mm和30 mm测段的绝对偏差与中误差,结果如表3所示。20 mm振幅各测段实测振动位移,如图12所示。
(a) 3 mm振幅X-Y视图
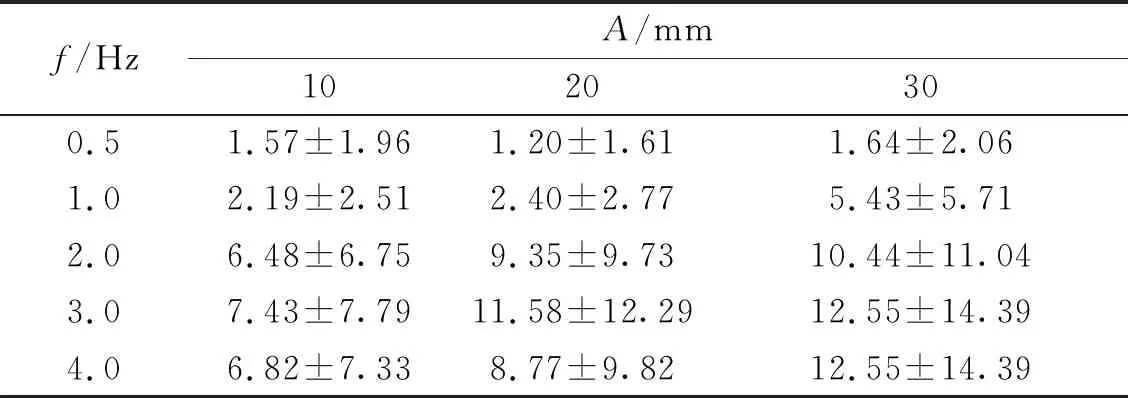
表3 GNSS-RTK不同测段振幅绝对偏差
(a) 0.5 Hz
利用FFT方法提取各测段数据频率,所测段的计算结果,如表4所示。3 mm振幅从0.5~4.0 Hz各测段获取的时间序列分析结果,如图13所示。
从表4和图13可知:GNSS-RTK可以识别出振幅3~30 mm、0.5~4.0 Hz的主频率。但是从表3与表1的对比,图11和图12与图7的对比中可知:GNSS-RTK测量刚性结构振动位移的准确性要远低于wMPS,首先3 mm与5 mm振幅的位移很难直接识别,其次得到振幅的绝对偏差与中误差远大于wMPS,这种结果主要是受到GNSS-RTK测量精度的限制。同时,也体现出wMPS在测量刚性结构固有参数时的优势。
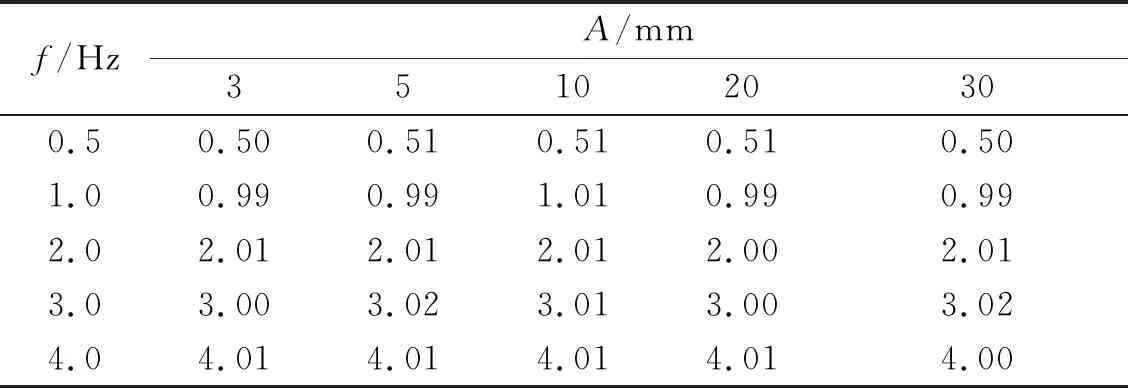
表4 GNSS-RTK各测段实测振动频率值

(a) 0.5 Hz
6 结 论
从分析结果可知:wMPS在测量刚性结构固有参数有明显的优势。首先,wMPS测量数据精度高,发射站转速快,采样频率高;其次,可同时对多个目标点直接测量,并通过增加发射站,可扩大量程。同时也表明,wMPS完全可以满足测量刚性结构固有参数的工作,在振幅3 mm时可以准确获取4.0 Hz频率值,在30 mm大振幅时依然可以获取4.0 Hz频率值。
由于wMPS单站测量距离最大25 m,限制了其测量大型结构固有频率的可行性,但是测程更大转速更快的发射站已经在试验中,未来wMPS在测量结构固有参数的应用前景广阔,对结构健康监测的发展有重要的参考意义。
