城市典型场景下低成本GNSS RTK定位性能评估与分析
2021-10-16王晓萌程正逢刘万科
徐 辉,王晓萌,程正逢,陈 功,刘万科,胡 勇
(1.中国电力工程顾问集团中南电力设计院有限公司,湖北 武汉 430071;2.武汉大学,湖北 武汉 430071)
1 引言
随着GNSS精密定位技术的不断发展,人们对于高精度定位的需求也在不断提高,尤其在车载LBS服务或车联网、自动驾驶等服务中,低成本导航定位存在较大需求。在城市典型环境(建筑密集、树荫遮挡、立交等)中,低成本GNSS接收机定位性能将大打折扣,这直接影响导航定位的实时性和精度。因此,分析低成本GNSS接收机在城市典型环境中的定位性能可为低成本导航定位应用提供有效参考。
为了验证低成本GNSS接收机RTK定位的可行性,国内外学者进行了一系列分析。Takasu等通过对低成本单频天线、GPS接收机,与测量型天线、接收机比较,发现低成本GNSS天线性能较差,接收机模块之间性能相差不大[1]。Odolinski等通过对单频GPS/BDS双系统低成本u-blox接收机与双频单GPS系统测量型接收机进行RTK测量,发现单频GPS/BDS双系统低成本u-blox接收机与双频单GPS系统测量型接收机定位性能相当[2,3]。He等对低成本的单频GPS/BDS双系统接收机和双频单GPS系统接收机进行RTK定位,发现在开阔环境下,单频GPS/BDS双系统接收机与双频单GPS系统接收机单历元RTK定位的可用性和可靠性相当[4]。Zhang等对低成本的单频u-blox接收机在静态和动态条件下的定位性能进行分析,结果表明在静态开阔环境下,水平方向上的精度可以达到亚厘米级,在动态环境下可以获得分米级的定位精度[5]。此外,众多学者通过对不同场景的静态、动态实测RTK实验结果分析发现,低成本GNSS接收机在长时间的观测下,其静态定位精度可以达到厘米级,在动态模式下定位结果精度也能满足基本定位需求,但是在城市峡谷、树荫遮挡等环境下能否达到大众市场的PVT应用需求有待进一步分析[6~12]。
综上所述,在低成本单频与双频RTK定位方面,虽然取得了较多的研究成果,但主要是针对RTK的可行性分析,对定位结果的研究也主要集中在静态数据或者开阔环境下的动态数据,对低成本接收机在城市典型场景下的单频与双频定位性能的详细分析较少。因此,本文选择目前国内外广泛应用的梦芯T906B和u-blox ZED-F9P双频低成本接收机,通过对比两种接收机在城市典型场景下单频与双频的RTK定位性能,从模糊度固定率、定位精度方面分场景进行了细致评估低成本GNSS接收机双频较单频定位性能改善情况。
2 GNSS相对定位模型
RTK是一种利用GNSS载波相位观测值进行实时动态定位的技术[13]。RTK定位主要包括双差浮点解解算和模糊度固定两个步骤,双差浮点解部分给出函数模型和随机模型,模糊度固定采用应用广泛的LAMBDA法。下面对此过程进行简单介绍。
2.1 函数模型
采用双差观测模型时,可消除接收机和卫星钟差;在城市环境下,通常采用短基线,利用参考站和移动站之间观测误差的空间相关性,通过差分可以消除或削弱移动站观测数据中的大部分误差。无论采用单频还是双频解算,其相对定位模型相同,只是数据的预处理存在差别。因此,其基本的观测方程为:
(1)
(2)
2.2 随机模型
随机模型是对随机噪声水平及其相关性的反应,不同系统卫星产生的噪声对GNSS定位结果及模糊度的解算都有很大的影响。常用的随机模型确定方法主要包括高度角法、信噪比法以及方差分量估计法等,其中方差分量估计法应用时需要反复迭代,计算量过大,在实际解算中应用较少;高度角模型能够更好地反映接收机噪声和大气延迟的影响;信噪比模型则对测站相关的误差更敏感,尤其是多路径效应。因此,本文采用信噪比模型,其定权公式如下式:
(3)
式(3)中,S为实测信噪比,Bi为相位跟踪环带宽,λi为载波相位波长,Ci为经验参数。在此基础上,建立一种简化的指数函数随机模型,即
(4)
式(4)中,S0为参考信噪比,σ0为观测值在参考信噪比下的标准差,a为放大因子。
2.3 参数估计与模糊度固定
设线性化后的双差观测方程如下:
(5)
式(5)中,y表示伪距和载波相位观测值;a和b分别表示模糊度参数和基线向量参数;A和B为相应的系数矩阵;Δ为观测噪声。
对式采用最小二乘或卡尔曼滤波进行参数估计,可获模糊度参数和基线向量参数的浮点估值,其精度约为分米级。而实现整周模糊度固定后,可获得厘米级的高精度定位结果。本文模糊度固定采用Teunissen教授提出的最小二乘降相关平差法(Least-squares Ambiguity Decorrelation Adjustment, LAMBDA),其对模糊度方差-协方差阵进行整数高斯变换以有效地降低方差分量间的相关性,最大限度地压缩搜索椭球以减少搜索过程中的节点数,提高搜索效率,是目前高精度导航定位中快速求解模糊度最成功的算法之一[14]。
LAMBDA方法采用最小二乘准则求解模糊度固定解,其目标函数为:
(6)
由于模糊度本身具有整数特性,最小二乘问题转换为整数最小二乘问题,其无法直接求解得到,而是通常采用搜索的方式来选出最优的模糊度候选解,本文选用目前最为流行的基于震荡式收缩策略的SEVB算法进行模糊度搜索[15],并在搜索完成采用Ratio检验方法对模糊度最优候选解的可靠性进行验证[16]。
3 城市典型场景定位性能分析
3.1 实验设计
本文选用了目前市面上典型的梦芯T906B和u-blox ZED-F9P低成本双频接收机,可以提供多系统双频定位,标称厘米级定位精度,收敛时间短且性能可靠,广泛应用于测量测绘、导航定位服务以及消费类车载导航等领域。表1为两款设备的部分技术指标。
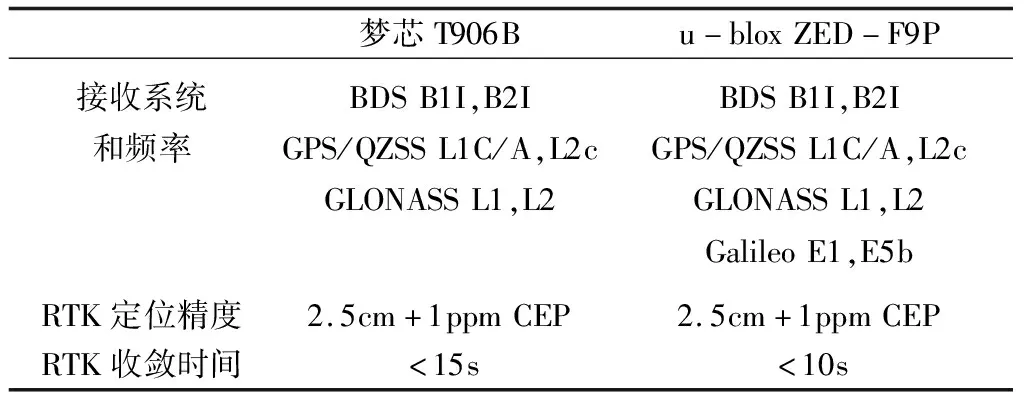
表1 梦芯T906B和u-blox ZED-F9P设备比较
为了对比测试城市典型场景下单频与双频RTK定位性能,在湖北省武汉市城区开展了车载动态实验,采集了梦芯T906B和u-blox ZED-F9P的动态RTK数据。轨迹图如图1所示,实验途经街道口、八一路、光谷和新竹路等地方,包含了开阔、半遮挡、遮挡等丰富的观测场景。

图1 实验路线图(为开阔场景,和为复杂场景)
测试过程中,设备安装如图2所示,梦芯T906B和u-blox ZED-F9P接收机分别与一个u-blox低成本双频天线连接,NovAtel FSAS高精度参考系统数据由IE(InertialExplore)软件后处理,通过导航中心坐标归算可获取高精度动态定位结果,作为实验的参考真值。

图2 设备安装图
3.2 数据情况
实验数据采集于2021年1月3日,采集时长约2h,采样间隔为1s,约7200个历元。下面简单介绍一下数据的卫星数和DOP值情况。
图3为梦芯T906B和u-blox ZED-F9P所观测到的卫星天空图。其中梦芯T906B主要能接收到BDS、GPS、GLONASS三系统,u-blox ZED-F9P可接收到BDS、GPS、GLONASS和Galileo四系统。总体上,两种设备的观测值相差不大,在低高度角时,卫星的跟踪都存在部分中断情况。

图3 卫星天空图
图4为梦芯T906B和u-blox ZED-F9P在观测时段内的卫星数与DOP值,可以看到,在开阔区域,梦芯T906B和u-blox ZED-F9P接收的卫星数保持在25颗以上,DOP值稳定在2以下,而在半遮挡和遮挡区域,可使得卫星数降至20颗以下,DOP值达到4左右,可见遮挡环境对卫星数和DOP值影响较大。
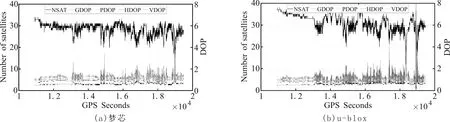
图4 卫星数与DOP值
3.3 定位性能分析
3.3.1 数据处理策略
对采集的动态数据利用武汉大学研制的高精度GNSS 动态定位软件进行事后仿真RTK实时处理,数据处理策略如表2所示。
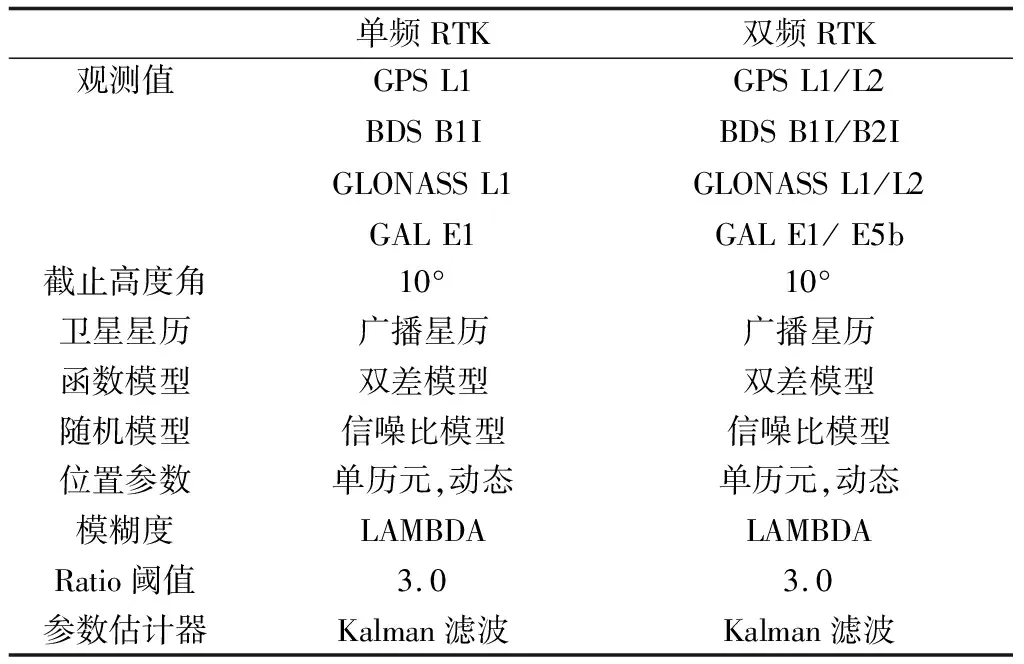
表2 数据处理策略
3.3.2 全程定位性能分析
为测试低成本GNSS接收机的单频与双频定位性能,解算全程数据的模糊度固定率和定位误差序列,分析全程定位性能。
整周模糊度解算是否正确直接影响RTK定位的精度,而模糊度固定的性能可以通过模糊度固定率来体现。模糊度固定率(ratio≥3)可以表示为:
(7)
式(7)中,nfixed表示固定历元数,nsum表示总历元数。
由表3可知,采用梦芯T906B和u-blox ZED-F9P的模糊度固定率均达到了55%以上,且双频固定率均高于单频,而梦芯的固定率略优于u-blox。

表3 梦芯T906B与u-blox ZED-F9P模糊度固定率
如图5和图6所示为梦芯T906B和u-blox ZED-F9P单频与双频定位误差序列,可以看到,双频定位结果较单频。通常采用计算E、N、U方向误差RMS来分析RTK定位性能,但RMS的结果在计算中容易受到粗差的干扰,因此,采用(68.27%)误差统计值来作为定位精度指标。由表4可知,采用梦芯T906B和u-blox ZED-F9P双频的定位精度均优于单频,但u-blox ZED-F9P的双频较单频优势更为明显。在条件下,梦芯T906B双频较单频在E、N、U方向分别提升21.7%、10.3%、5.9%,u-blox ZED-F9P双频较单频在E、N、U方向分别提升55.3%、78.4%、67.0%。梦芯T906B单频与双频的定位精度为厘米级,u-blox ZED-F9P的单频定位精度为分米级,双频定位精度为厘米级。

图5 梦芯T906B单频与双频解算结果
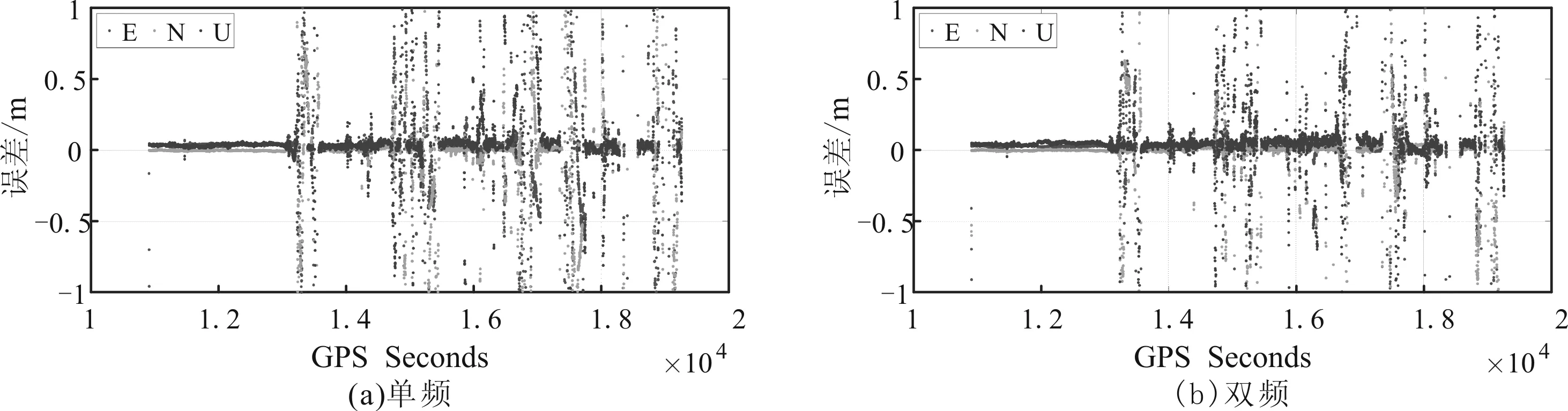
图6 u-blox ZED-F9P单频与双频解算结果
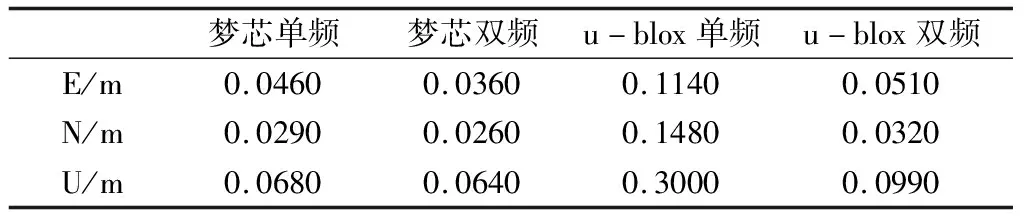
表4 梦芯T906B与u-blox ZED-F9P定位RMS(1σ)
3.3.3 分场景定位性能分析
对城市典型场景进行分场景定位性能分析,将测试场景分为开阔区域,半遮挡区域和遮挡区域(图1),分别分析在不同场景下低成本GNSS接收机单频与双频的模糊度固定率和定位性能(如表5和表6所示)。

表5 梦芯T906B与u-blox ZED-F9P在不同场景下的固定率
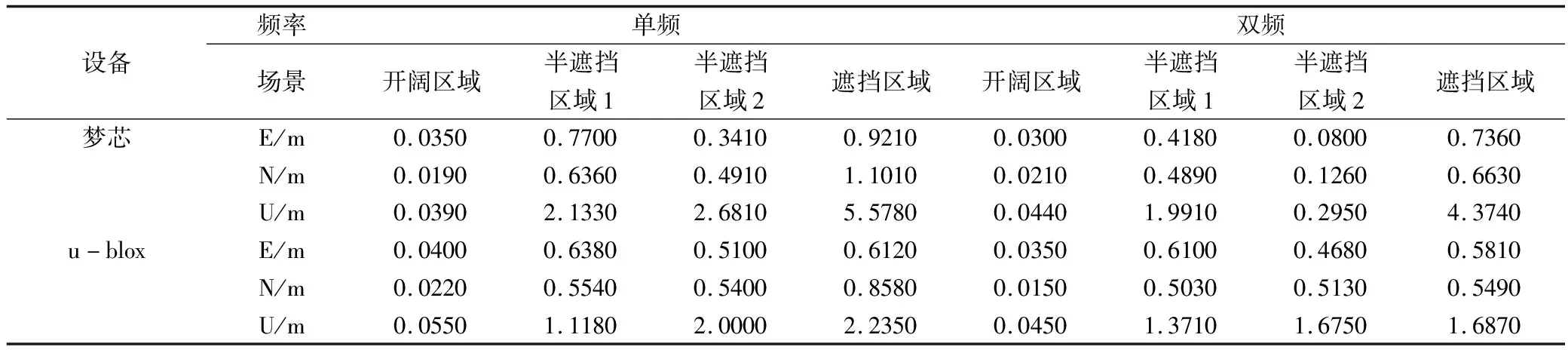
表6 梦芯T906B与ublox ZED-F9P在不同场景下定位RMS(1σ)
在开阔区域,梦芯T906B接收机的单频与双频模糊度固定率均达到了95%以上,u-blox ZED-F9P接收机双频的固定率较单频提升约16%;在定位精度方面,两种接收机均达到了厘米级,可以认为单频与双频结果无明显差别。
在半遮挡区域,模糊度固定方面,梦芯T906B接收机在半遮挡区域1和半遮挡区域2中双频较单频分别提升约24.7%、14.1%,u-blox ZED-F9P接收机双频较单频分别提升约9.7%、1.4%,在增加固定历元的同时,虽然浮点解有所减少,但固定解与浮点解历元总数有所提升。定位精度方面,梦芯T906B接收机在半遮挡区域1中,双频较单频在E、N、U方向上分别提升45.7%、23.1%和6.7%;半遮挡区域2中,双频较单频分别提升76.5%、74.3%和89.0%。u-blox ZED-F9P接收机在半遮挡区域1中,双频较单频在E、N、U方向上分别提升4.4%、9.2%和-18.5%,由于粗差的影响,使得单频的天向定位结果反而优于双频,在半遮挡区域2中,双频较单频分别提升8.2%、5.0%和16.3%,双频天向定位精度较为正常。可以看到,两种接收机单频与双频定位精度均为亚米级,总体上双频较单频具有明显定位优势。
在遮挡区域,梦芯T906B接收机单频仅有约6.9%的固定率,而双频仍然能保持19.7%的固定解,u-blox ZED-F9P接收机单频仅有约1.6%的固定率,而双频仍然能保持一定的固定解,二者固定解与浮点解历元总数均占有优势。定位精度方面,此时定位精度为米级,单频与双频的误差序列都有较大的波动,存在较多粗差,梦芯T906B接收机双频较单频在E、N、U方向上分别提升20.1%、39.8%和21.6%,u-blox ZED-F9P接收机双频较单频在E、N、U方向上分别提升5.1%、36.0%和24.5%,因此,两种接收机双频较单频都具有较明显的优势。
综上所述,在开阔场景下,梦芯T906B与u-blox ZED-F9P单频与双频的模糊度固定率和定位精度基本相同;在半遮挡场景下,两者双频固定率较单频均有提升,固定历元与浮点历元之和也有所增加,梦芯T906B双频定位精度较单频提升较大,u-blox ZED-F9P双频定位精度较单频有一定程度提升;在遮挡场景下,两者双频固定率较单频提升约10%,双频定位精度较单频提升10%~30%。
4 结论
本文对低成本双频GNSS接收机梦芯T906B和u-blox ZED-F9P进行了城市典型场景下动态定位精度的测试分析。通过对比两种接收机在不同场景下单频与双频的定位结果,得出如下结论:
在开阔环境下,单频与双频模糊度固定率均较高,定位精度均能达到厘米级,单频与双频定位性能无明显差别;在半遮挡环境下,双频模糊度固定率和定位精度较单频均有较大提升;在遮挡环境下,单频与双频的模糊度固定率均较低,定位精度在几米到几十米,结果都存在较大误差,但双频较单频仍具有较大优势。综上所述,在城市典型场景下,低成本双频RTK的模糊度固定率和定位精度较单频均有明显提升。
