柔性机构在机器人领域的研究应用现状
2021-10-10梁晶晶李瑞琴宁峰平张启升
梁晶晶 李瑞琴 李 清 宁峰平 张启升
(中北大学机械工程学院 山西·太原 030051)
随着工业和医疗等领域需求的不断提高,机器人需要具有优良的环境适应性、超强的安全性,以及良好的人机互动性,需要应用柔性机构破除传统机器人关节的僵硬和材料的刚度,朝着更轻、更软、更协调的方向发展。在这样的背景下,“柔性机器人”应对更高的需求不断发展起来。通过柔软材料的利用,驱动方式的创新,在先进制造业中可以发挥出更大的价值。
1 柔性机构的研究现状
随着工业的发展,尤其是在精微领域,对机构的精度不断提出更高的要求,对于刚性机构在发生弹性变形过程中产生的系统误差已经无法满足更高的精度要求。随着各国学者对柔性机构的研究,柔性机构中免装配、无摩擦、可通过变形来传递运动和力、精度较高等优势性能不断得到验证。当今,新型材料、新的制造工艺和技术不断出现,在与机构学、结构力学以及计算机技术的相互交叉研究领域内,利用柔性变形的微纳与仿生机器人已逐渐成为机器人学领域的研究热点。本文根据文献资料,对柔性机构在仿生机器人及康复机器人领域的构型、机构性能、分析方法等方面的主要研究成果进行综述,以明确研究热点和未来发展方向。
2 柔性仿生机器人
柔性机构因具有弹性、通过变形可储存和释放能量,并且免装配、无摩擦,这种特性可以应用来模仿生物的柔性,如关节、腿部、翅膀等,实现相应的运动及动力,从而达到仿生的效果,目前已是机器人领域的一个主要研究方向。
国内对于柔性仿生机器人的研究有北京航空航天大学的王田苗、孟偲等通过分析壁虎身体结构及腿部自由度,设计并研制了柔性连杆的人造壁虎脚掌吸附材料的足式仿壁虎机器人结构,如图7所示。分析了其运动原理,为了实现仿壁虎的柔性运动,采用柔性连杆改进并简化了机构。设计对角线运动步态实现机器人的直线行走以及转弯动作。通过对机构自由度的计算,分析机构的可行性,并结合静力学分析对柔性杆的选择进行讨论。柔性杆件的应用能在一定范围内实现仿生柔性运动,但由于受材料强度等因素的影响,在更大范围的柔性运动要求下会受到一定的限制。
西北工业大学的李岩,葛文杰等根据仿生学结合袋鼠的生物结构特征,建立了柔性脚仿袋鼠跳跃机器人的刚柔混合模型。利用柔性机构可连续光滑变形及质量轻等特点,且易于控制,将其应用于仿生跳跃机器人领域,实现跳跃机器人在不同跳跃速度下的脚部轮廓变形。
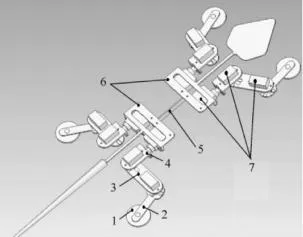
图1:仿壁虎机器人
宗光华、贾明等设计研究了一种应用柔性铰链连接刚性杆的扑翼机构,利用柔性铰链的被动变形实现翅膀的翻转运动。于仕泽等通过分析象鼻内部结构,并以此为仿生设计对象,设计了一种仿生柔性机械臂,如图8所示。柔性机械臂由8个柔性关节单元组成。柔性单元为三轴并联平台,由3个子链并联连接静平台与动平台。单个子链分别由1个万向铰链、输出轴为螺纹杆的电机和与下一个平台连接的旋转螺母3部分组成。柔性关节可实现纵向收缩,也可实现灵活的万向弯曲,下方部分可以将输出螺纹杆进入到上方部分,完成机构运动,对航天作业需求有非常强的适应性。

图2:蛇形臂机器人
魏东文等(可变结构柔性机械臂)以章鱼触手的纵向和横向肌肉为灵感,提出了一种柔性生物张拉整体机械手,以模拟章鱼触手的收缩行为,实现各节段的可变运动模式。机械手以弹性弹簧为骨干,由四根缆索驱动,每段有一个可变结构机构,实现了对每段的独立控制,独立控制各节段的弯曲、收缩运动和变结构运动。该机械臂具有各部分自由度可控的特点,扩展了其环境适应性和操作能力。王姝歆等通过分析昆虫胸翼结构,提出了一种由双晶片压电驱动器、柔性双摇杆机构和仿生翼组成的扑翼系统。讨论了柔性四杆机构的运动学和静力学问题,对确定昆虫翅膀的运动有一定的指导意义。韩国建国大学的Quoc VietNguyen等研究了仿昆虫扑翼微型飞行器系统,应用曲柄连杆滑块机构与模拟甲虫后翅的翅形和主脉结构相结合,并在翼根处安装柔性铰链,使机翼在扑翼运动过程中由于气动和惯性力的合力而被动旋转,并对扑动性能进行了试验,提出了系统的力测量方法。哈佛大学的R.J.Wood以双翅目昆虫的形态为基础,设计、制作和分析了一种3cm翼展的微型飞行器,具有类似双翅类昆虫的特性,提出了一种由一个驱动自由度和两个被动自由度组成的新型机翼传动系统,是一个输入端有一个移动关节的四杆。日本法政大学的Masahiro Masuda等提出了一种适应在废墟中移动的多腿机器人的柔性机构,这种柔性机构模拟蜈蚣爬行,身体由分别含有2条腿的9个单元组成,单元之间用橡胶连接以保证柔性,每个关节可以被动地适应颠簸,腿部采用了一个拱形结构,以避免障碍和保持身体的刚性,可以避开障碍也可传播运动,每个单元通过两个伺服电机驱动分别进行垂直运动和前进后退。诺丁汉制造技术大学的Xin Dong,Mark Raffles等设计了一种蛇臂机器人,如图8所示该机器人具有独特的双驱动结构,在任意构型下都能保持索的张力。此外,该设计使柔性接头结构具有很大的灵活性(弯曲能力)和适当的刚度。在此基础上,提出了一种新的运动学模型,该模型可以显著地简化缆索驱动系统的运动学和蛇形臂机器人的雅可比矩阵。该蛇臂机器人具有柔性连续结构,可用于进入许多领域的受限场所,如微创手术和工业装配。
3 康复机器人
随着人口老龄化趋势越来越明显,康复机器人市场进一步扩大,对于康复机器人的技术研究也在进一步发展。近年来,康复机器人针对不同患者不同部位的康复运动进行功能复现,基于仿生原理进行设计,应用柔性机构,结合人体工程学,辅助患者进行康复运动训练。
孙黎霞等设计了一种绳驱动的柔性仿人头颈并联机器人,3根绳索和1个压缩弹簧连接着静、动平台。压缩弹簧和绳索分别模拟人的颈椎和颈部肌肉,起到支撑和驱动控制作用。进行了逆运动学分析和绳索驱动力优化设计。该研究成果有助于深入研究柔性脊柱的并联机构。为复现人头颈的运动提供重要参考,同时可促进颈部康复机器人和绳索驱动技术的发展。上海理工大学孟巧玲等,在分析半圆弧梁型柔性铰链刚度的基础上,设计了半圆弧梁铰链串联式仿生外骨骼机械手,如图9所示,通过电机驱动绳索实现手指弯曲,当手指需要伸展时,控制电机反转放松绳索,利用铰链在屈曲过程中的储能来帮助患者的手恢复伸展状态,并根据齐次坐标变换建立机械手的运动学模型,研究绳驱下的运动特性,通过实验分析和仿真分析,外骨骼机械手能够输出满足日常生活所需的抓握力,可提供正常的关节活动,可实现对手功能障碍患者进行手部康复训练与日常活动。针对目前截肢患者对仿生假手的需求越来越大,张晓华等提出了一种具有灵活手指的灵巧机械手。机械手具有两个自由度的弹簧柔性手指,其中一个自由度是正的,另一个是被动的,由弹簧实现。机械手可以抵抗冲击并适应物体的形状,可以作为末端执行器应用在各种环境中。应用柔性铰链替代刚性关节可以在一定程度上实现康复运动功能,但是柔性铰链通过变形实现弯曲,其角度是有限的,无法实现满足大范围运动需求,因此有一定的局限性。

图3:仿生柔性机械臂的整体结构

图4:仿生外骨骼机械手手指结构
庞在祥等提出了一种仿生柔性腕关节并联机构,如图10所示,它是一种绳索驱动、压缩弹簧支撑的混合机构。为了实现腕部机构的运动,采用并联结构支撑移动平台,由一根电缆控制,起到腕部肌肉的作用。该机构的设计为柔性关节并联机构复制人类手腕运动提供了新的思路,在一定程度上促进了康复机器人和绳驱动技术的发展。
王才东研制了一种踝关节辅助康复机器人,该机器人由上平台、下平台、背屈/足屈驱动系统、内翻/外翻驱动系统及其连接部分组成。根据SPS机构,上平台通过球销副和两个驱动分支链与下平台连接。机器人有两个自由度,但上面的平台可以实现三种运动。为了实现踝关节辅助康复,患者在上平台上的踝关节进行仿生运动。该机器人以一个中心球销对作为主要支撑来模拟踝关节的运动;驱动系统采用刚柔混合结构,背屈/足底屈运动和内翻/外翻运动是分离的。这些结构特征可以避免对患者的继发性损害。

图5:腕部康复柔性并联机构
S.Bhavani等提出了一种绳驱动的柔性仿生手臂,仿生手臂通过收集来自截肢肌肉的信号来运作。仿生手臂由3d打印的手部结构、用于监测肌肉活动的myoware传感器,一个arduino处理器,六个马达和一个可伸缩的手套组成。该柔性仿生手臂解决了假肢使用费用高、佩带重的问题,能够帮助患者有效地抓取各种物体。
4 结论
柔性机构在并联机器人、仿生机器人、康复机器人等领域得到了广泛应用。柔性机器人是未来机器人发展的重要趋势,针对柔性机构设计理论中存在的精度问题和结构拓扑法存在参数较多的问题,在理论设计上通过构型分析与尺度综合,研究柔性机构集成化的优化设计方法,实现柔性结构简化和轻量化设计,并通过对柔性铰链的结构形式和材料方面设计大行程柔性铰链,解决柔性铰链运动范围受限的影响,扩大柔性机构应用范围。新型柔性机构不断涌现,柔性机构应用不断扩展,日益增加的应用需求同时也在导引柔性机构设计理论及方法的快速发展,未来柔性机器人通过对新型软材料的应用,以及创新的驱动方式,从适应性、安全性、互动性等多角度出发,会很大程度上改善柔性机器人的性能。