基于PWM整流器模糊控制新开关表的DPC
2021-10-08孙海东曲永印
张 浩,柳 成,孙海东,曲永印
(1.北华大学电气与信息工程学院,吉林 吉林 132021;2.吉林化工学院信息与控制工程学院,吉林 吉林 132022)
因具有功率因数高、THD小等优点,三相全控型PWM整流器被广泛应用于系统整流、谐波抑制、无功补偿等领域[1-3].PWM整流器的控制策略有很多,以直接电流控制[4]和间接电流控制为主.作为众多控制策略中的一种,直接功率控制不仅能适应三相整流系统的非线性特性[5-8],而且与传统控制相比,不需要复杂的模型解耦和参数整定环节[9],具有响应速度快、谐波含量小等突出优点.然而,在传统直接功率控制中,滞环输出会出现无功失控,存在网侧电流波形畸变、输出直流电压波动大等问题[10],导致系统性能变差.本文通过构建新的电压矢量开关表,减小当电压矢量改变时无功功率受到的影响.传统直接功率控制大多采用PI控制器对有功功率参考值进行优化,但在系统参数变化和出现扰动时,系统鲁棒性差,这也是导致滞环输出功率误差波动大的原因之一.因此,本文采用模糊控制[11]作为电压外环优化手段,根据模糊推理自适应调节kp、ki参数;通过仿真测试,验证本文所提出控制方法的可行性.
1 三相PWM整流器DPC系统结构与原理
1.1 三相PWM整流器数学模型

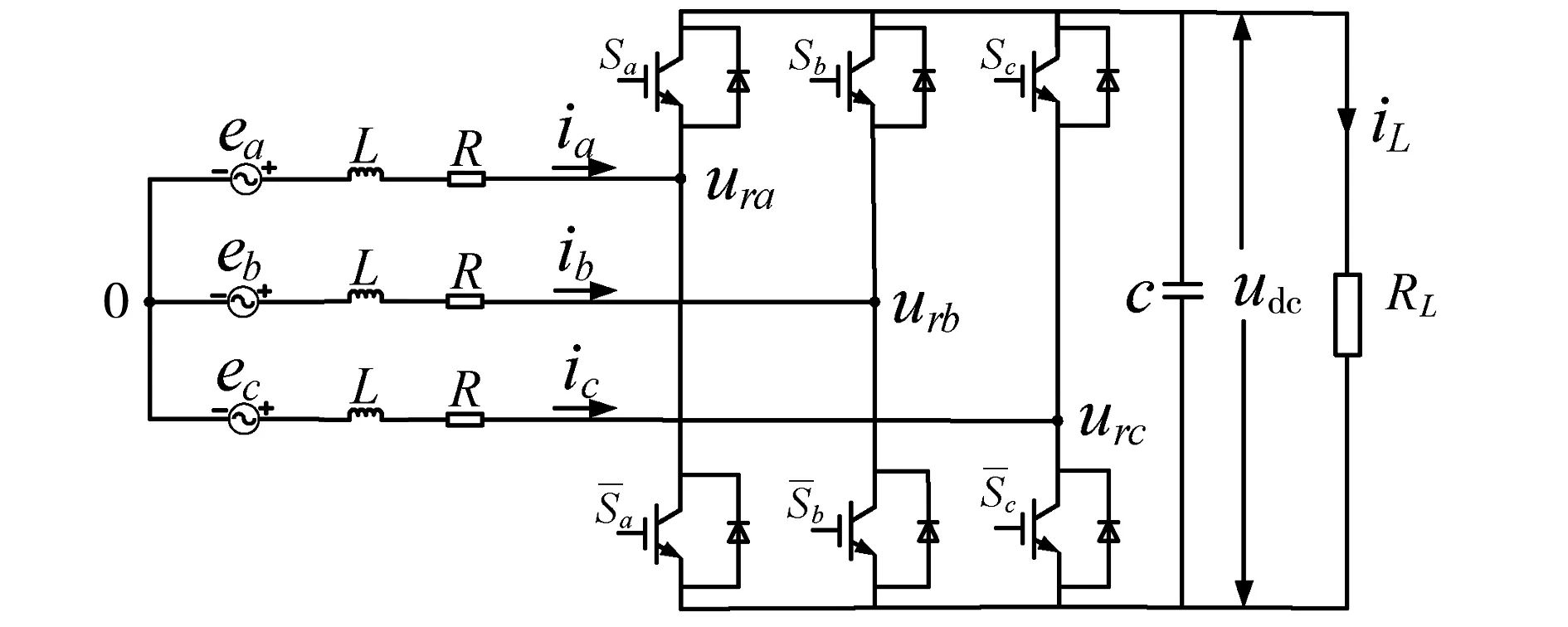
图1 三相电压型PWM整流器结构Fig.1 Structure of three-phase voltage type PWM rectifier
在理想状态下,假定三相系统对称,将图1中的三相系统变换到两相旋转坐标系.系统方程:
(1)
式中:ud、uq为网侧三相电压在dq坐标系下的对应电压;id、iq为网侧三相电流在dq坐标系下的对应电流;Sd、Sq为开关管在dq坐标系下的桥臂开关矢量;urd、urq为整流器三相电压转换到dq坐标系下的电压;iL为整流器输出的直流电流.
根据瞬时功率理论得到系统在两相旋转坐标系下的瞬时有功p和无功q:
(2)
1.2 基于瞬时功率理论的DPC系统原理
三相PWM整流器的传统直接功率控制系统结构见图2.系统主要由瞬时网侧电压和电流检测模块、网侧瞬时功率计算模块、扇区电压矢量选择器、功率滞环比较器、开关选择模块以及电压外环PI控制组成.
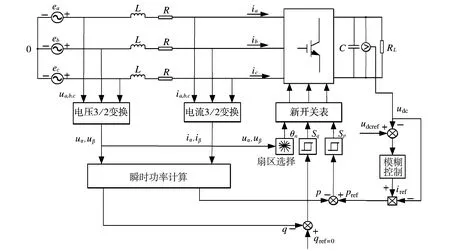
图2 传统DPC原理Fig.2 Principle of conventional DPC
将网侧三相电压和电流变换到两相静止坐标系,通过计算得到系统的功率方程.
(3)
根据式(3)计算出系统交流侧的瞬时功率p和q,再与电压外环得到的有功功率指令值做比较,差值作为滞环比较器的输入.定义Δp=pref-p、Δq=qref-q,滞环比较器的输出变量为Sp、Sq.Sp、Sq表征了系统在当前状态下的开关管状态,根据状态值调节系统功率,使得系统输出最佳.传统滞环特性的构造方程:
式中:Hj为滞环比较器的环宽;Δj为功率误差.
根据滞环比较器的输出值Sp、Sq,对照扇区划分角θn,最终确定直接功率控制系统的电压开关矢量信号,再根据开关函数Sk确定三相PWM整流器各相桥臂的导通状态,即非零电压矢量U1、U2、U3、U4、U5、U6,以及零电压矢量U0、U7.根据下式确定电压矢量的幅角θn:
作为一种非线性控制方法,直接功率控制适用于三相PWM整流系统,并且不需要复杂的解耦过程.三相PWM整流器直接功率控制主要基于瞬时功率计算原理,通过调节系统的功率来间接控制交流侧的电压、电流.三相系统工作在整流状态时,iq近似被认为是0,且忽略电抗器等效电阻R.假设网侧的电压矢量与d轴重合,则uq=0.根据式(1)可以得到系统的功率变换模型:
(4)
由于电网电压矢量在d轴上的分量为定值,所以ud值不变.结合式(2)和式(4)可以看出,电网的电流矢量id、iq与系统的功率成比例关系.当需要调节系统的有功功率时,只需要控制开关管的导通电压矢量urd;同理,系统的无功可以通过iq控制.因此,系统的功率值间接体现了交流侧电流的大小和相位关系.
2 模糊控制新电压开关矢量模型设计
2.1 新开关电压矢量表原理
传统直接功率控制多采用滞环比较的控制方法,但系统的功率输出会产生一定波动,影响了系统的性能.本文以有功功率增加时减少对无功功率的影响为原则,构造出新的开关导通电压矢量.同时,电压外环采用模糊自适应控制,提高直流输出电压的跟踪精度.
在传统直接功率控制中,当零矢量作为开关管的导通电压矢量时,由式(4)可以推导出此时的有功分量是增加的,有功功率只取决于网侧电压矢量ud的大小,而urq也为0.同时,有功功率和无功功率具有耦合关系,所以式(4)中的diq/dt小于0,系统的无功功率也在增加.因此,调节零矢量电压有功功率和无功功率会同向变化.当有功p增加时,零电压矢量对无功功率的减弱效果不明显,无功功率会出现失调现象,导致滞环调节效果不理想.
新开关表的构造原理见图3.其中,定义网侧电压矢量和网侧实际电流矢量为Uh、Ix;Ih为指令电流矢量.以第一扇区θ1为例,此时Ix超前于指令电流矢量和网侧电压矢量,系统需要增加有功功率p,减小无功功率q.由式(4)可以看出,基本电压矢量U4、U5、U6都可以达到上述的功率调节效果,使得Ix向Ih靠近.由图3可知,当网侧实际电流沿着合成电压矢量(Uh-U6)的方向趋近指令值时,不仅有利于系统的无功调节,而且有功功率增加缓慢,保证调节电压矢量时对系统的无功影响,减小系统功率波动.按照此规则,将传统直接功率开关表中的零电压矢量替换成由上述规律推导出来的非零电压矢量,得到新型开关表,见表1.
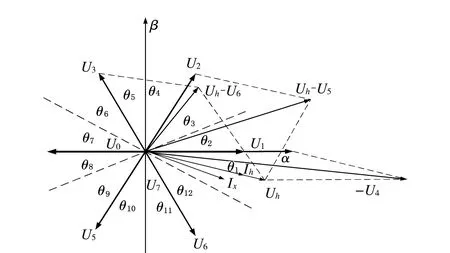
图3 新开关表的构造原理Fig.3 Construction principle of novel switch table

表1 新开关矢量Tab.1 Novel switch vector
2.2 电压外环模糊PI控制
当改变系统参数或者受到干扰时,传统的PI控制需要不断调节参数才能适应时变、非线性系统的变化.所以,整流系统很难获得理想的稳定状态.本文采用模糊控制对PI参数进行实时整定,使其能自适应地稳定优化系统参数.作为一种非线性控制方案,模糊控制多用于非线性的控制系统中.模糊控制系统结构见图4.
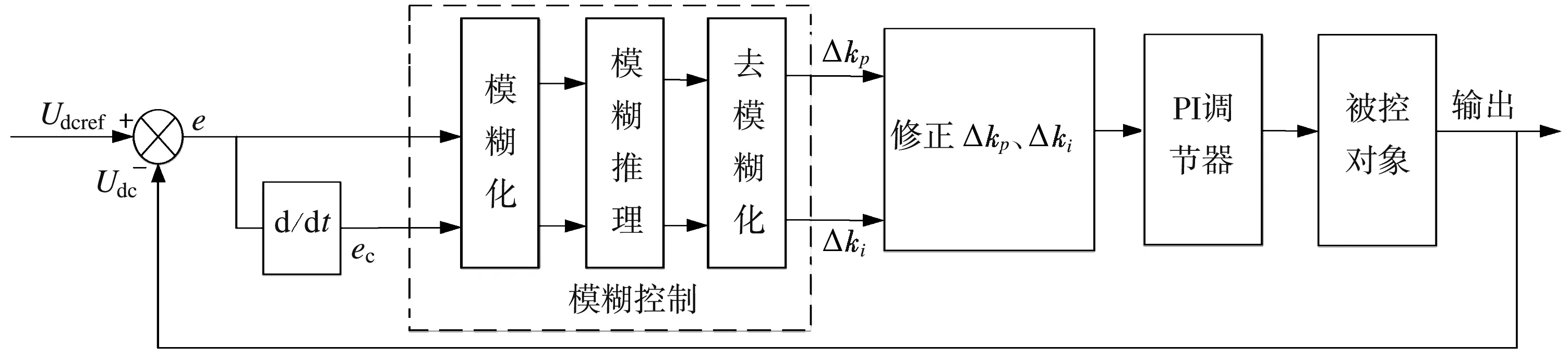
图4 模糊控制系统结构Fig.4 Structure of fuzzy control system
设定模糊控制器的两个输入分别为输出电压差值e和差值的变化率ec,修正量Δkp、Δki作为输出.输入和输出的论域范围在-3~3,论域中的子集设定为{NB,NM,NS,ZO,PS,PM,PB}.其中,NB、PB的隶属度函数采用trapmf函数,其余为trimf函数.为了输出精确的控制量,根据隶属度函数的设计,本文采用马丹尼型模糊推理,利用重心法对推得结果进行反向模糊化,得到模糊规则,见表2、表3.
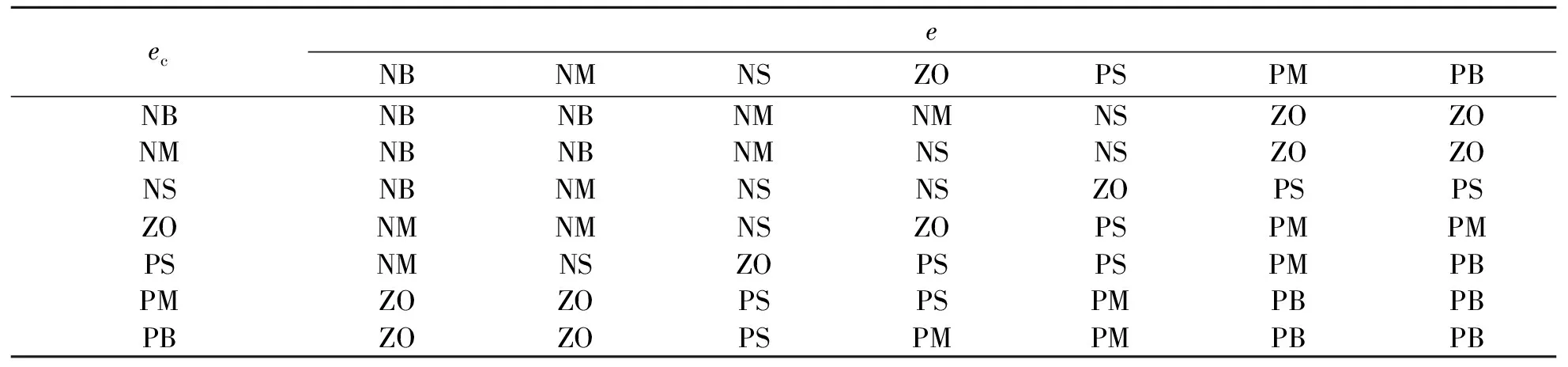
表3 Δki模糊规则Tab.3 Fuzzy rule of Δki
由表2、表3中的模糊规则推理得到修正值,再与初始值相加,完成PI参数优化:
式中:kp1、ki1为初始值;kp、ki为输出值;Δkp、Δki为整定值.
3 仿真与分析
为验证本控制方案的有效性,对系统进行仿真测试.系统主要参数:三相交流电压为工频380 V,滤波电感L为3.8 mH,网侧线路电阻R为0.3 Ω,直流侧电容C为5 000 μF,负载为10 Ω,整流输出电压Udc为600 V.
传统DPC和模糊新电压开关矢量DPC电流波形见图5.由图5可见:网侧a相电流在传统直接功率控制下存在较大畸变,而由于模糊新电压开关矢量直接功率控制改善了系统的无功不可控失调的情况,使得网侧的电流波形平稳,更接近于正弦波.图6为系统稳态时的谐波含量对比.由图6可知:传统的直接功率控制谐波含量为8.59%,而模糊控制新电压开关矢量直接功率控制下的系统谐波含量仅为2.19%,低于国际标准要求的5%.所以,系统更加稳定,鲁棒性强.
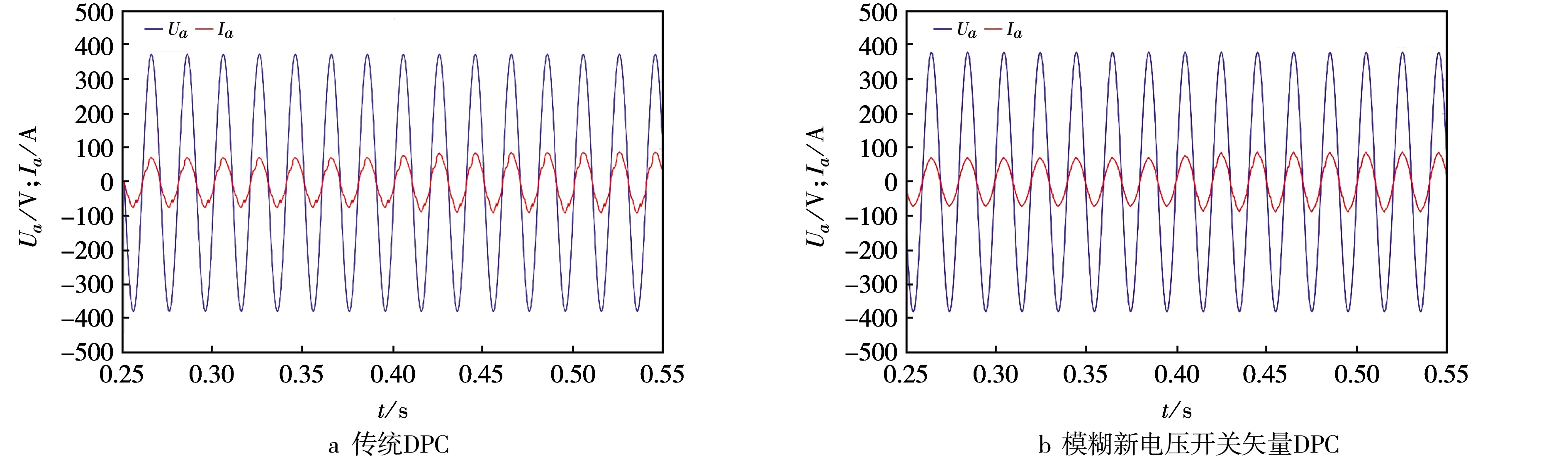
图5 传统DPC和模糊新电压开关矢量DPC电流波形Fig.5 Current waveforms of conventional DPC and fuzzy novel voltage switching vector DPC
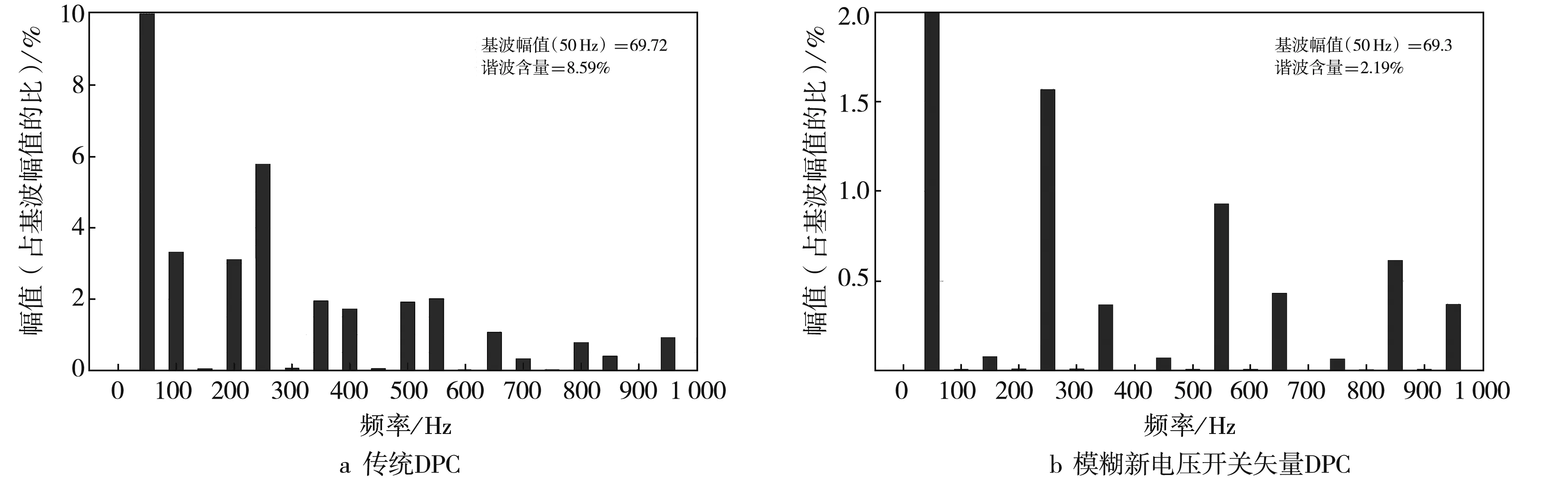
图6 传统DPC和模糊新电压开关矢量DPC谐波含量对比Fig.6 Comparison of harmonic content between conventional DPC and fuzzy novel voltage switching vector DPC
传统DPC和模糊新电压开关矢量DPC输出电压误差见图7.由图7可知:在未加入负载扰动时,传统DPC的输出电压波动大约在3 V左右,较模糊新电压开关矢量DPC的电压误差值大很多,不利于系统的稳定运行.而且,模糊新电压开关矢量DPC减小了系统的超调,大约在0.04 s就达到理想状态,响应速度变快,输出电压波形稳定.为比较两者的抗扰动性能,在0.4 s给系统一个负载扰动.当系统再次稳定时测得模糊新电压开关矢量DPC的电压波动大概在0.7 V左右,明显优于传统DPC,抗干扰性更强.
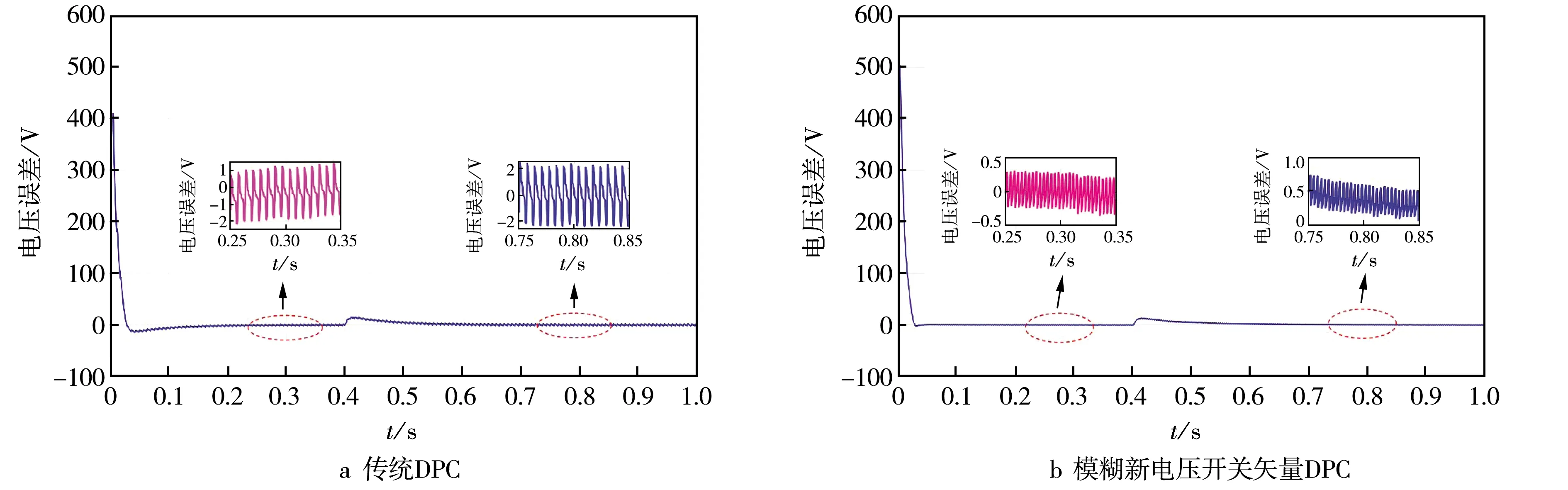
图7 传统DPC和模糊新电压开关矢量DPC输出电压误差Fig.7 Output voltage error of conventional DPC and fuzzy novel voltage switching vector DPC
比较网侧输入功率可以发现:模糊新电压开关矢量DPC下的系统功率波动小于传统DPC.当有功功率增加时,无功功率很快就能恢复到稳定状态,并无大范围的波动,由此验证了新开关表中电压矢量可以减轻无功功率不可控的情况.功率波形见图8.

图8 系统有功功率和无功功率变化Fig.8 Change of system active power and reactive power
4 结 论
通过分析传统直接功率控制发现,滞环功率控制的优劣决定了系统性能的优劣.本文在瞬时功率理论的基础上提出了模糊控制新电压开关矢量的直接功率控制方法.通过比较分析可知,本文方案不仅可以减小功率波动对系统产生的影响,而且具有很强的鲁棒性,输出的波形质量较传统直接功率控制有了很大改善.仿真试验表明,本文提出的控制方案具有可行性.随着数字控制技术的不断发展与应用,系统对象的性能得到了很大提升,未来将结合DSP和FPGA技术,搭建实物电路,对本文所提方案做进一步优化.
