基于四元数的滑雪运动员姿态检测算法
2021-09-13钟晓婉韩冬桂
钟晓婉,匡 军,韩冬桂, 刘 芳,燕 怒
(武汉纺织大学机械工程与自动化学院,武汉 430200)
随经济发展,滑雪参与人数呈指数增长,滑雪受伤人数呈递增态势[1],即使是专业国家滑雪集训队运动员,其损伤比例也居高不下[2]。因此,亟需一种专用设备对滑雪运动过程人员姿态实时监测。以提升滑雪人员训练质量并提供相应安全防护。
目前人体姿态研究主要分为:视觉图像识别与惯性传感器数据分析[3-6]。季刚等[7]提出基于图像分析的运动员姿态分析模型,利用多特征光流跟踪运动员关节点。赵从英[8]利用体育场馆监控设备采集图像,提出基于加权量化矩阵方法得到运动员技术姿态的特征向量,实现运动员姿态判断。图像识别可在固定场景有效完成姿态检测目的,精准评价动作标准程度[9]。但视觉法对应用场所有所限制,跳台滑雪属于高速、不固定场所及场景复杂的运动,视觉法对滑雪运动员姿态判断受限较大,检测精度及效率不足。
利用多类传感器,并依靠数据算法还原运动过程是目前广泛应用的一种采集、监控物体位姿的技术手段,并已在智能手环、跌倒检测、飞行器控制等领域使用[10-11]。曾亿山等[12]利用六轴传感器通过动态事件规整算法识别四肢动作,实现对婴儿爬行动作的识别和姿态检测,同时实现对动作的判断与预测。李元良等[13]利用MEMS传感器采集运动员持拍手臂加速度、角速度等数据,通过反向传播(back propagation,BP)神经网络算法实时输出动作识别结果,实现了对乒乓球等球类运动多达7种动作识别及成绩统计,该方法对提升运动成绩统计效果显著。近年来,传感器技术成熟,能够满足用户体积重量等使用要求及高效检测目的,但目前滑雪领域应用匮乏,实现滑雪运动员姿态检测对滑雪成绩评判与安全智能防护研究提供有效案例支撑。故选择惯性传感器联合检测滑雪运动员姿态,实现复杂环境下滑雪运动员姿态精准检测。
针对跳台滑雪这一传统运动项目为对象,选择九轴传感器MPU9250,利用加速度计校正陀螺仪由于高速滑雪运动产生的震动干扰带来的误差。通过Mahony互补滤波算法进行数据融合,有效完成对滑雪运动员的姿态解算,实现对跳台滑雪过程中运动员的姿态检测。算法利用四元数精简运算过程,大幅降低计算量,提高动作检测精度。
1 滑雪运动特征提取
1.1 运动特征分析
跳台滑雪运动过程中,运动员在空中的姿态会经历不同变化,如图1所示。运动员在跳台滑雪过程中助滑、起跳、空中飞行及着陆4个步骤的姿态标准度直接折算计入成绩。跳台滑雪运动员沿跳台方向滑行,躯体调整俯仰角度以维持身体平衡,并调整不同位姿,最终着陆冲过终点,滑雪过程可简化为一个运动坐标系相对于基坐标系的位姿变换。为了简化计算,将运动员在滑雪过程中的位置信息忽略而重点研究运动员姿态变化过程。

图1 跳台滑雪过程分解图
在滑雪过程中,以运动员为基础建立运动坐标系b系,以初始位置的地理坐标系为固定坐标系n系,求解两坐标系间相对旋转角度俯仰角θ、横滚角γ、方位角ψ来确定运动员的姿态,设定绕X轴旋转角度为θ,绕Y轴旋转角度为γ,绕Z轴旋转角度为ψ。两坐标系间的旋转矩阵,即方向余弦矩阵可表示为
(1)
分别为运动坐标系绕x轴、y轴、z轴旋转矩阵

(2)
与式(1)对比可解:
(3)
1.2 捕捉数据方案
采用加速度计融合陀螺仪数据,利用四元数求解滑雪运动员姿态信息,以评估运动员运动状态。基于传感器的姿态解算系统采用加速度计和磁力计来校正陀螺仪误差,多适用于缓慢平和的运动状态[16-19]。由于此系统中运动员运动时的产生的震动对磁力计数据影响较大,故采用加速度计来校正陀螺仪误差,数据融合流程如图2所示。

图2 系统工作流程图
2 位姿结算融合算法
2.1 更新四元数
为了获得实时更新四元数,构建时间t与四元数Q的微分方程,四元数的三角表示式为
(4)
由于跳台滑雪运动员姿态数据的主要测量器件为陀螺仪,对时间t进行微分,微分方程化简可得
(5)
记为
(6)
选择一阶龙格库塔法求解微分方程,精度高,误差小。可通过有限迭代求解函数微分方程。套用一阶龙格库塔法迭代公式可得四元数微分方程为
Q(t+Δt)=Q(t)+Δtψ(t)Q(t)
(7)
(8)
式中:运动员运动过程中x、y、z轴输出的角速度wx、wy、wz可由陀螺仪测出;Δt为已知计算周期。
2.2 数据融合
由于磁力计受滑雪运动员高速运动中产生振动的影响偏移值较大,故忽略磁力计的数据。本文利用加速度计数据矫正陀螺仪误差,陀螺仪数据还原滑雪运动员欧拉角。图3为滑雪运动员姿态检测数据融合流程图。

图3 数据融合流程图
加速度计测得数据,利用数据的向量叉积去度量传感器数据误差大小,叉积公式为
|P|=|gb|×|Vb|sinθ
(9)
式(9)中:P为两向量叉积结果;gb为加速度测量实际重力加速度向量;Vb为理论重力加速度向量;θ为两向量之间夹角。
将向量单位化,因实际应用中正确使用传感器测量数据误差角度很小,根据小角近似原理故可推导出
|P|=sinθ≈θ=Er
(10)
借助PID控制思想,用PI控制器来控制滑雪运动员陀螺仪数据补偿值大小,可表示为
EGYRO=KPEr+KIEr
(11)
式(11)中:KP、KI为PI控制器补偿值;EGYRO为误差补偿值;Er为误差量化结果。
利用比例项来控制传感器可信度,把PI控制器计算得出的补偿值加在角速度上,得到可信度较高的陀螺仪数据,代入一阶龙格库塔法可得当前四元数,根据更新后的四元数求得有效滑雪运动员姿态角度。
NGYRO=RGYRO+EGYRO
(12)
式(12)中:NGYRO为补偿后陀螺仪数据;RGYRO为实际测量陀螺仪数据。
3 实验及结果分析
为了验证Mahony互补滤波算法对于滑雪运动员姿态解算效果,设计了滑板选手姿态采集实验,滑雪姿态测试系统穿戴如图4所示。将滑雪运动过程类比于滑板运动,便于实验数据采集及动作控制,实验过程如图5所示。

图4 姿态测试系统穿戴位置

图5 滑板选手姿态检测过程
跳台滑雪运动员运动过程包含俯冲加减速和人体振动等具体动作,实验利用滑板选手从斜坡向下滑行过类比跳台滑雪运动员运动过程,滑板选手沿坡度向前俯冲,同时模拟跳台滑雪助滑、起跳、俯冲及落地姿态,获得与真实跳台滑雪运动员训练相近的运动数据。人体装配数据采集装置,运动过程呈现向前俯冲态势,路面颠簸造成人体振动。
图6、图7为Mahony互补滤波算法解算姿态角与原始数据及高斯滤波解算姿态角效果对比。图6(a)、图7(a)加速度数据解算姿态角曲线对比可知,加速度计在静态过程检测姿态信息可靠,动态测试环境中对姿态捕捉能力较弱,不适用于单传感器检测运动姿态;图6(b)、图7(b)陀螺仪数据解算姿态角对比曲线可知,陀螺仪在动态检测过程中能够还原基础运动角度,但振动幅度过大时,数据会产生瞬时漂移,在运动速度变换导致振动频率幅度等参数快速变化时,采集数据有较大误差。图8为高斯滤波分别与加速度计、陀螺仪原始数据解算Ψ对比。可以看出原始数据能够基本还原运动员Ψ姿态角信息。
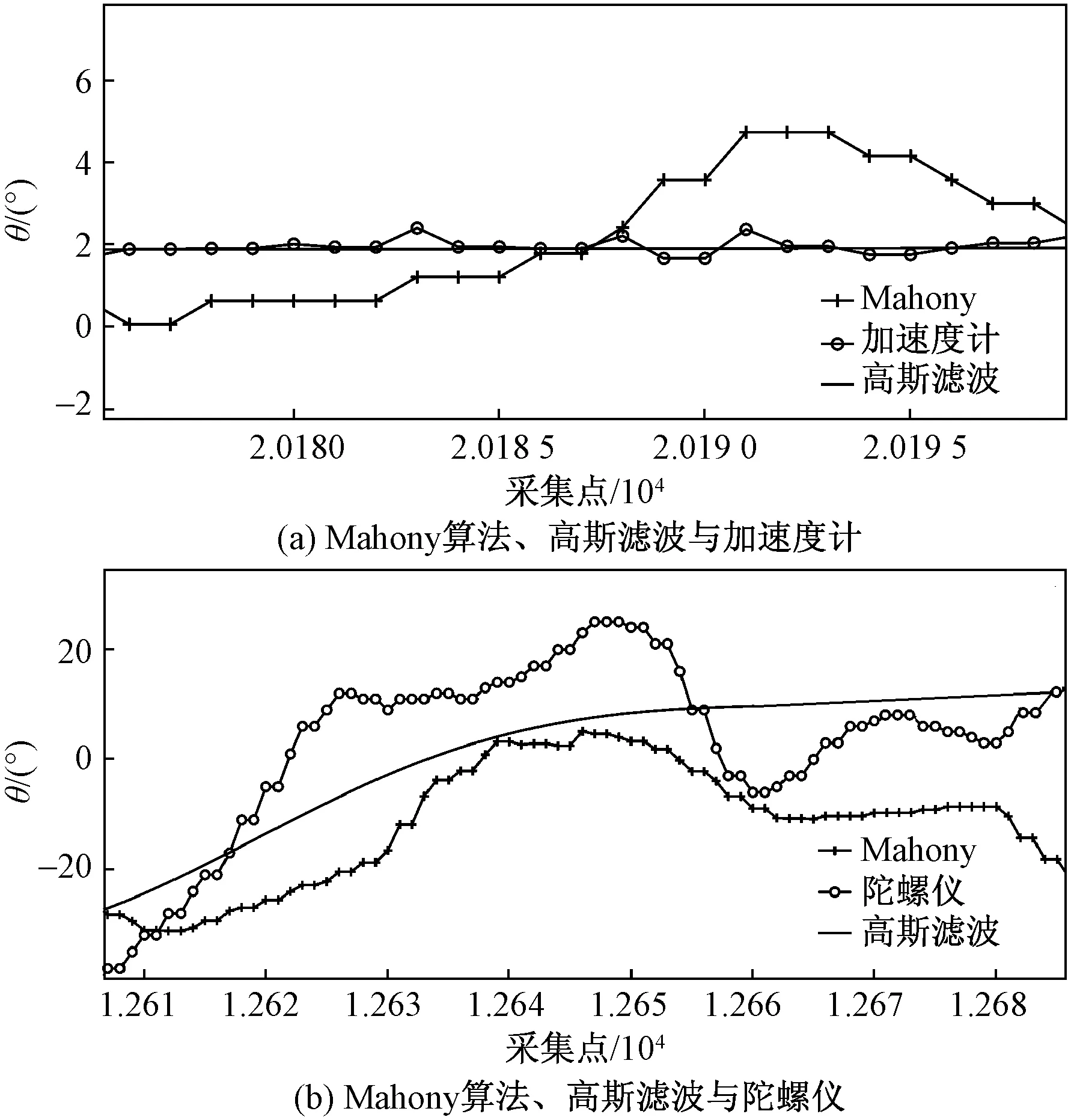
图6 Mahony算法、高斯滤波与加速度计、陀螺仪解算θ对比

图7 Mahony算法、高斯滤波与加速度计、陀螺仪解算γ对比

图8 高斯滤波与加速度计、陀螺仪解算ψ对比
通过上述实验,验证了基于四元数的Mahony互补滤波算法能够有效还原滑雪运动员运动过程特征姿态角,弥补单个传感器检测精度与稳定性不足的缺陷,用于高速运动姿态解算精度能够满足实际需求。
4 结论
利用MPU9250九轴传感器与STM32系列单片机搭建滑雪运动员姿态检测系统,通过设计实验仿真得到以下结论。
(1)系统实现了对滑雪运动员姿态数据的实时检测。
(2)设置PI控制器中KP为0.8,KI为0.001,通过基于四元数的Mahony互补滤波算法对运动员姿态数据进行了数据融合,得到精确姿态角。
(3)通过实验验证,该算法能够改善单个传感器解算姿态角的检测精度与稳定性。具有实时检测、数据准确,运行稳定等特点。
(4)本文算法可对后续滑雪运动员运动效果统计与安全防护预警提供有效方法支撑。
