微型晶体谐振器预封定位平台协调运动控制研究
2021-08-23徐克刚李天宝喻信东李刚炎
徐克刚,肖 佩,李天宝,胡 剑,喻信东,李刚炎
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.泰晶科技股份有限公司,湖北 随州 441300)
晶体谐振器作为电子信息工业中频率控制与频率选择的基础元器件,具有频率稳定性高、抗干扰能力强等优点[1],广泛应用于消费类电子产品、小型电子类产品、移动终端、网络设备等领域。按封装方式的不同,晶体谐振器可以分为DIP(dual in-line oacjage,直插式)和SMD(surface mounted devices,贴片式)两大类。SMD晶体谐振器主要用于安装空间较小的电子产品中,在移动终端、通信设备产品升级周期加快的背景下,已经成为市场主流。随着5G通信和物联网时代的到来,系统之间日益加快的数据传输速度促使SMD晶体谐振器向着微型化、高稳定性和高频率的方向发展[2],具有更高性能的微型晶体谐振器应运而生。在微型晶体谐振器生产过程中,预封定位平台是微型晶体谐振器封装设备的重要组成部分,其主要功能是作为载体完成微型晶体谐振器封装底座与封盖的预封工作。在工作过程中,需要其多轴间协调运动以满足与其它工位相配合的时序与节拍要求,保证微型晶体谐振器封装设备的大批量、高效率、高质量生产。
目前,国外对于微型晶体谐振器封装设备的研究较早,国内起步较晚且有技术限制。对预封定位平台的研究则多集中于单轴控制,较少注重于多轴间的协调运动。为了保证预封定位平台与其他工位的配合,要求三轴间能够实现联动以提高运动速度,保证预封工作的效率。因此笔者研究了微型晶体谐振器的协调运动控制,使其不再使用单轴控制的方法,并运用交叉耦合控制的方法实现微型晶体谐振器预封定位平台的协调运动控制。
1 微型晶体谐振器预封定位平台功能与控制需求
微型晶体谐振器预封定位平台是将微型晶体谐振器底座由实际位置移送至理想位置的装置,为三轴平台,如图1所示。主要由伺服电机、滚珠丝杠、工作台以及导轨、联轴器、回转支承等连接部件组成。X轴平台控制X方向的运动,Y轴平台控制Y方向的运动,R轴平台将R轴的直线运动通过回转支承转换为旋转运动。
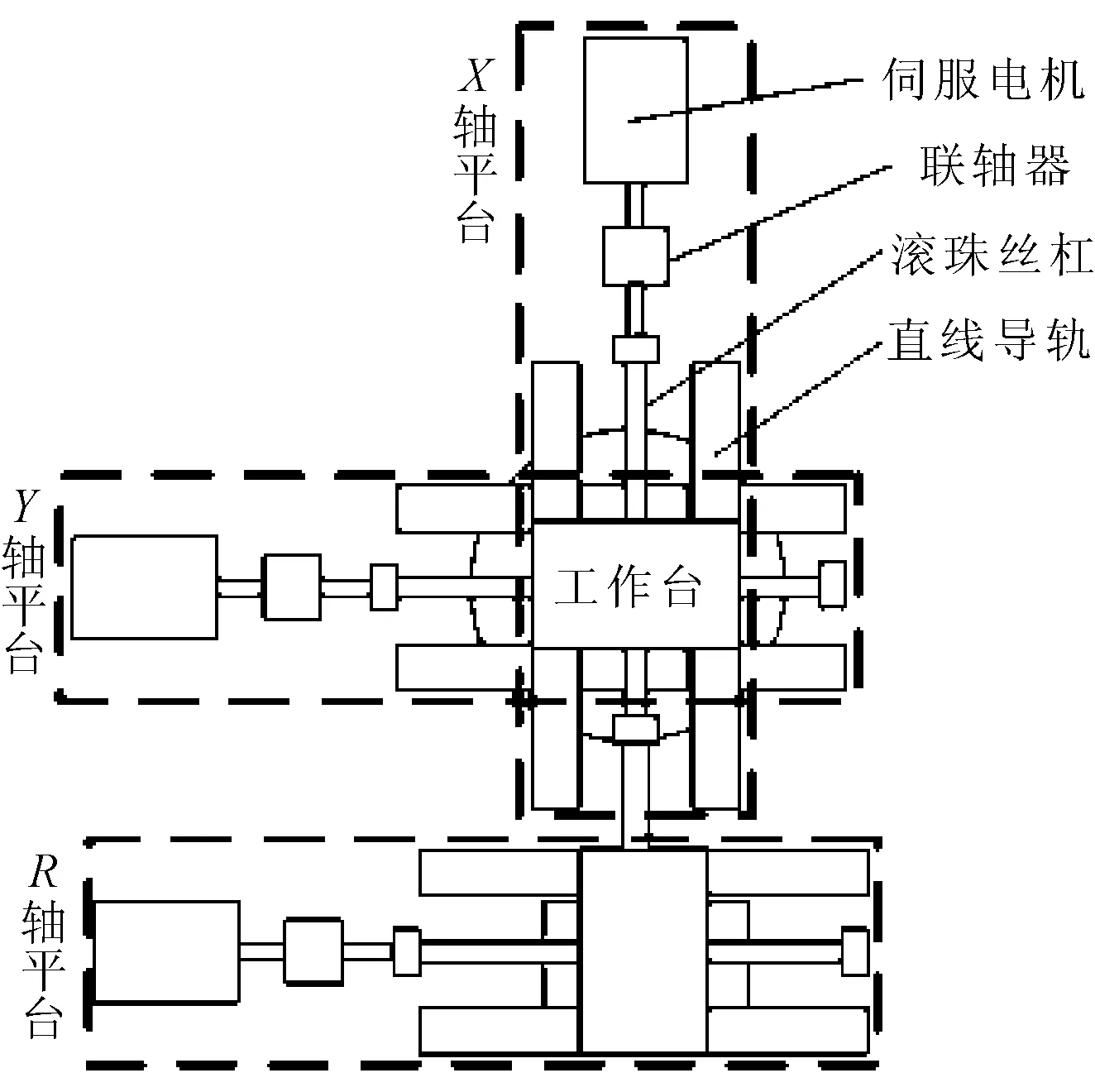
图1 微型晶体谐振器预封定位平台组成与结构
根据图2所示的微型晶体谐振器预封定位平台布局图,微型晶体谐振器预封定位平台位于工位1与预封工位之间,微型晶体谐振器预封定位平台的主要运动功能是往返于工位1与预封工位之间载动载料盘实现定位运动。以主点焊过程为例,①载料盘从底座存储机构中被移送至工位2;②预封定位平台载动处于工位2的载料盘平台运动到视觉检测工位;③视觉检测装置检测到此时底座实际位置与理想位置的偏移量,将位置偏移量传送给预封定位平台运动控制器;④预封定位平台载动封装底座,由视觉检测工位移动到预封工位,完成预封定位过程;⑤预封定位工作完成后,点焊机械臂将封盖与底座进行预封,再由预封定位平台将封装底座移送回原位。
预封定位平台目前采用单轴控制的控制方式,但其运动决定了预封工作乃至整个封装过程的效率。因此要求:①预封定位平台在运动过程中具有高稳定性和高速性的性能;②改变目前单轴运动的控制方式,通过协调运动控制实现三轴同时运动;③通过协调运动控制使预封定位平台实际运动点的运动轨迹为直线,缩短其运动距离,减少其运动时间[3]。
2 微型晶体谐振器预封定位平台协调运动控制研究
2.1 预封定位平台控制方法
为了实现上述控制需求,将运用交叉耦合控制方法,使得每一个单轴的运动控制器不只接收来自本轴实时的运动情况,还需要接收其它运动轴实时的运动情况,以便本轴可以根据其他轴当前的运动情况调整自身的运动,使本轴的运动与其它轴的运动协调起来,并使其各段运动路程均为点到点的直线运动,达到控制三轴联动并能缩短运动路程以达到缩短运动时间的目的。
伺服电机和滚珠丝杆的进给伺服系统作为微型晶体谐振器预封定位平台的驱动系统,为微型晶体谐振器预封定位平台提供动力及定位控制环节,预封定位平台伺服系统的控制精度将会直接影响预封定位平台的运动精度。为了确保伺服系统的输出运动速度和运动精度,先设计其单轴控制器,改善单轴的控制性能。在单轴控制的基础上,采用交叉耦合的方法设计协调运动控制器。在设计单轴控制器时,预封定位平台的单轴控制系统采用三环控制结构[4],即电流控制环、速度控制环和位置控制环。首先是电流环,此环完全在伺服驱动器内部进行;第二环是速度环,主要进行负反馈PID调节,速度环控制时就包含了速度环和电流环;位置环是最外环,此时的系统运算量最大,动态响应速度也最慢。PID算法具有结构简单、调整方便、稳定性高和工作可靠等优点,因此速度环控制器采用PID算法[5],得到的速度环控制器即可设计好位置环控制器,即所需要的单轴运动控制器。得到单轴控制器后,即可采用交叉耦合的方法,将三轴的运动协调起来,得到微型晶体谐振器协调运动控制器[6-7]。控制结构如图3所示。

图3 预封定位平台控制结构
2.2 微型晶体谐振器预封定位平台动力学模型
微型晶体谐振器预封定位平台驱动机构动力学模型是运动控制的基础,得到预封定位平台的动力学模型即可得到预封定位平台协调运动控制的控制对象。微型晶体谐振器预封定位平台组成包括最常见的伺服电机和滚珠丝杠的驱动机构,支撑工作台的直线导轨,以及滚珠轴承、工作台和连接电机与丝杠之间的连接部件,可分析预封定位平台受力情况,建立其动力学数学模型[8]。
为了建立预封定位平台动力学数学模型,对其结构进行简化:伺服电机、滚珠丝杠、联轴器之间的连接可以看作刚性连接,总刚度用Kn表示;滚珠丝杆在两端轴承处、丝杠和螺母之间的滚珠连接以及工作台与导轨处的连接具有一定的弹性和阻尼,可以将其等效为弹性阻尼结构,阻尼系数为Cn;除此之外,预封定位平台运动中广泛存在摩擦,包括电机电刷和转子之间的滑动摩擦转矩、轴承和滚珠丝杠副中的滚动摩擦转矩以及导轨副中的滚动摩擦力可将其等效为摩擦力矩τf。微型晶体谐振器预封定位平台各参数如表1所示。

表1 预封定位平台各部分参数
简化后预封定位平台可以等效为存在摩擦由伺服电机和滚珠丝杆驱动的系统,输入端为电机电压,输出端为预封定位平台实际运动点的位移,得到的预封定位平台等效原理图如图4所示。

图4 预封定位平台等效原理图
根据基尔霍夫电压定律,伺服电机的电压方程为:
Vm=Rmim+Lmim
(1)
式中:Vm为电机输入电压;Rm为电机电阻;im为电流;Lm为电机电感。
根据牛顿第二定律,滚珠丝杆动力学方程为:
(2)
式中:θ为电机输出转角;M为工作台质量;x为工作台位移;h为滚珠丝杆传动比;J为电机转子、联轴器、丝杠和轴承等转动部分的转动惯量。
滚珠丝杠传动比为:
(3)
式中:L为滚珠丝杠导程。
忽略摩擦力矩的作用,以电机的输入电压为输入量,以预封定位平台的位移为输出量,可求得预封定位平台的动力学模型为:
(4)
2.3 预封定位平台协调运动控制器设计
在速度环控制器设计中,由于PID控制器中比例、积分、微分参数互相影响,若在单轴控制中应用PID控制,难以调整出适合的参数。针对此问题,可在单轴速度器设计中使用 PI控制方案,其控制结构简单、响应速度快、参数调整方便,但其超调量大、刚度低。同时,也可在PI控制结构的基础上增加反馈环节,其响应速度快、无超调、鲁棒性强、抗干扰性能好,但其响应时间长。结合上述控制方案的优缺点,笔者在控制器中加入前馈环节,使得输入在经过积分环节之前进入系统,响应速度更快,并通过优化控制器算法以减小超调量。速度环控制器结构如图5所示,前馈环节由比例增益Kf决定,在提高系统快速性的同时,又增强了系统的鲁棒性。
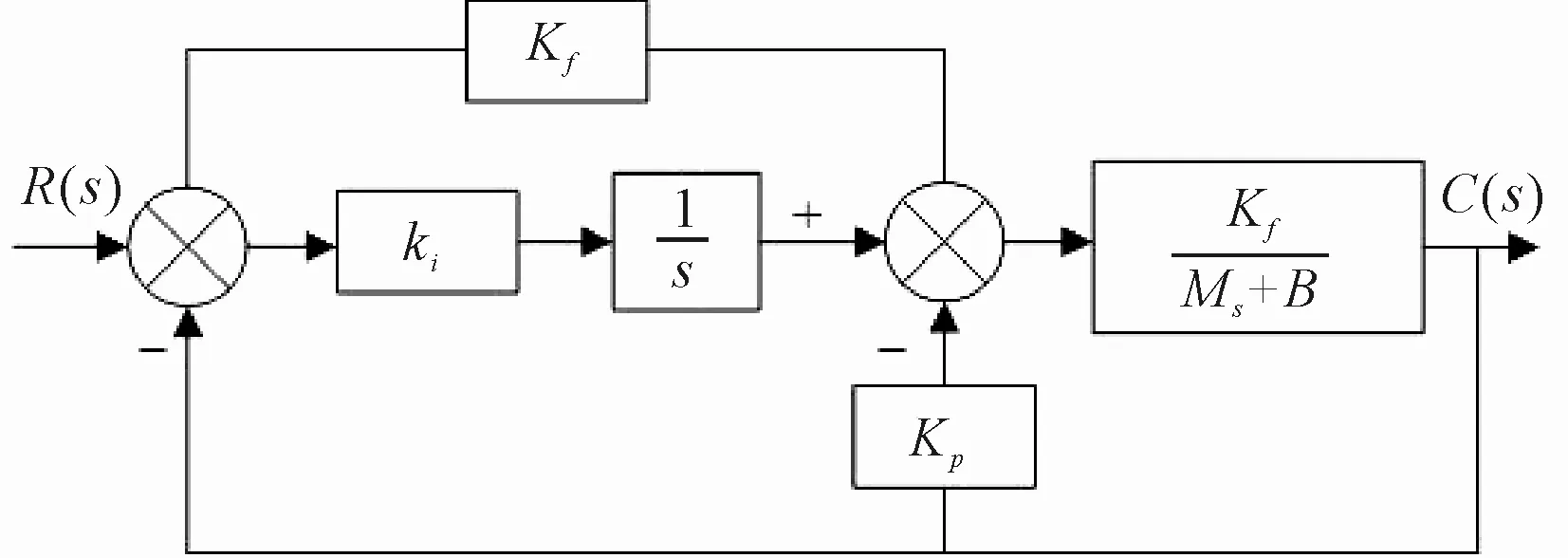
图5 速度环控制器结构图
基于得到的速度环控制器,根据三环控制的控制逻辑,以速度环控制器为基础,位置环采用比例控制,可以得到单轴的位置环控制器,即单轴运动控制器,如图6所示。其中Tp为位置环增益,Tv为速度控制器,G(s)为定位平台驱动机构传递函数。

图6 单轴运动控制器结构图
在微型晶体谐振器预封定位平台的协调运动控制中采用交叉耦合控制方法,其本质在于保证各轴运行性能的情况下,建立各轴的协调运动控制,以保证微型晶体谐振器预封定位平台运动的准确度。由前述分析可知,预封定位平台的运动为点到点直线运动,其运动控制只与其实际位置和理想位置有关,笔者将协调运行控制器设置在控制系统的位置回路部分。控制器的输入为工位2到视觉检测工位的位移量、视觉检测装置检测后得到的位移修正量、预封定位平台的运动路线误差,经过交叉耦合处理后,控制器输出各轴运动路线误差量并分配到各轴,以得到各轴的补偿量,再重新输入到单轴控制器中,对产生的运动路线误差进行补偿,在控制三轴联动的同时使得预封定位平台作直线运动,使其运动速度更快,效率更高[9]。交叉耦合运动结构如图7所示。

图7 交叉耦合运动结构图
3 微型晶体谐振器预封定位平台协调运动控制仿真分析
建立面向速度环的PI控制、PI加上反馈控制环节、PI加上前馈控制环节的仿真模型,输入阶跃信号后,经过仿真得到其响应曲线如图8所示。

图8 速度环控制器仿真
由图8可知,速度环控制器采用PI控制时,达到稳态所需时间较短,响应速度快,但超调量较大;加上反馈环节后,控制可以做到无超调,但是达到稳态所需时间较长,响应速度慢;加上前馈控制环节后,达到稳态所需要的时间也很短,同时超调量小,可以满足控制需求,验证了速度环控制器设计的正确性。针对设计的单轴运动控制器,采用MATLAB/Simulink进行仿真模型,输入正弦信号,并在T=6 s时输入一个外界扰动信号,得到响应曲线如图9所示。

图9 单轴运动控制器仿真
由图9可知,在单轴运动控制器中,达到稳态需要一段较短的时间,总体上响应快速准确。对其施加50 N、100 N和150 N的外部扰动力后,位移滞后较小,恢复时间也较短,而且对扰动力的变化不敏感,改变外部扰动力滞后,其响应变化不明显。因此,单轴运动控制器鲁棒性较强,适用于预封定位平台的运动控制。
笔者建立协调运动控制器仿真模型,其运动路线误差如图10所示。由图10可知,微型晶体谐振器预位平台在刚开始运动时有一个较大误差,最大可以达到0.2×10-1mm,根据前文分析可知,其在运动启动时响应较慢,运动有滞后,且由于有超调量等原因,因此可能造成较大误差;而后轨迹误差逐渐收敛,并围绕在0.2×10-1mm附近波动,误差值较小。封装底座长宽为3.2 mm×2.5 mm,封盖长宽为2.85 mm×2.15 mm,因此预封定位平台的运动轨迹误差不会造成预封工作的偏移。仿真结果表明在改善单轴运动控制和采用交叉耦合控制器来控制微型晶体谐振器预封定位平台的运动后,平台的运动轨迹精度能达到高精度的要求。
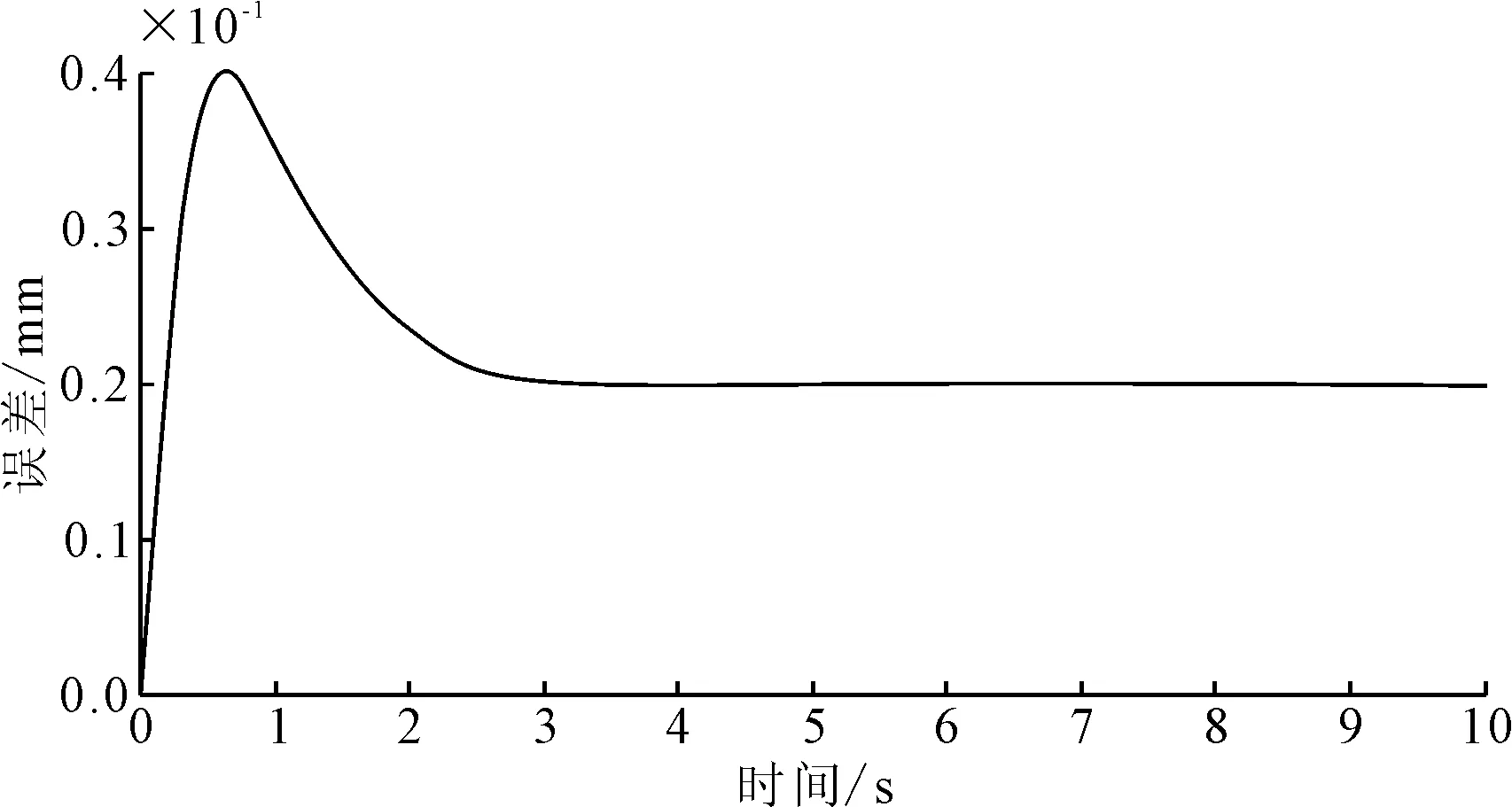
图10 运动轨迹误差仿真
建立的协调运动控制器仿真模型,其运动轨迹仿真结果如图11所示。
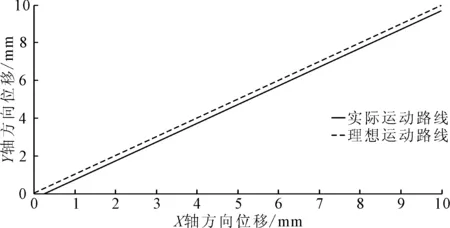
图11 预封定位平台运动轨迹仿真结果
由图11可知,预封定位平台实际运动点的实际运动轨迹与理想运动轨迹基本重合,实际运动轨迹比理想运动轨迹稍有滞后。在6 s时,对其施加一个负载扰动,由图11可以得知,运动轨迹有轻微偏差,但偏差幅度很小,总体上还是按照直线运动轨迹来运动。因此由上述分析可知,基于改善后的单轴控制器的微型晶体谐振器预封定位平台交叉耦合控制系统满足所需要的按照直线运动轨迹来运动的需求,运动过程中误差小,而且在有外界扰动时,基本不受干扰。表明所设计的单轴控制器和协调运动控制器保证了定位平台的运动性能,能够实现三轴联动并使得微型晶体谐振器预封定位平台按照直线轨迹来运动的要求。
4 结论
针对微型晶体谐振器预封定位平台的协调运动控制问题,建立了定位平台的数学模型,设计了单轴运动控制器,基于此得到交叉耦合控制器,得到以下结论:①建立的数学模型可以在满足准确性的情况下作为预封定位平台的控制对象进行有效控制;②得到的单轴运动控制器能够满足微型晶体谐振器预封定位平台的控制需求;③基于协调运动控制的交叉耦合控制器实现了定位平台多轴联动,以最短的直线轨迹运动,且运动轨迹误差小,抗干扰能力强,保证其运动速度快,稳定性好,工作效率高。
