盾构姿态变化对管片影响与控制研究及展望
2021-08-20董毓庆马少俊
丁 智,董毓庆,张 霄,马少俊
(1.绍兴文理学院土木工程学院,绍兴 312000;2.浙大城市学院土木工程系,杭州 310015;3.安徽理工大学土木建筑学院,淮南 232001;4.浙江省建筑设计研究院,杭州 310006)
近年来,由于地铁建设规模不断扩大,盾构法作为一种高安全、快速度、低扰动的施工方法在各大中城市地铁建设中得到了广泛的应用[1-2]。随着地下空间的高度开发,地下建(构)筑物逐渐形成一个错综复杂的地下网络[3]。为了减轻新建隧道对周围环境的影响,大多隧道选择避让地下建筑物施工,从而导致盾构“蛇形”运动的现象层出不穷。同时,盾构穿越不良地层时姿态不易控制,继而盾构千斤顶推力、管片拼装、盾尾壁后注浆压力等施工荷载控制难度也将加大,由此引发的管片破损、错台、上浮等病害问题将越发凸显,进而影响管片的耐久性和安全性[4]。因此,盾构姿态动态变化对管片的影响与盾构施工荷载是紧密相关的。
中外针对盾构施工阶段管片结构受力的影响因素及评价方面已经做了部分研究。Kasper等[5]模拟了考虑地下水、盾壳与土层作用、注浆压力等因素下的隧道掘进过程,探究了管片的椭圆变形机理,管片外部压力的变化情况和上浮问题。Saito等[6]进一步建立管片拼装动态三维力学模型分析管片应力变化,并结合现场监测数据对比研究。陈俊生等[7]基于ADINA模型针对管片受到的千斤顶推力与不均匀注浆压力分析,发现环缝面的不平整更容易造成管片的应力集中而产生开裂。唐孟雄等[8]通过实测数据发现施工阶段盾构机壁后注浆压力和千斤顶推力对管片内力影响显著,应严格控制在一定范围,这与Takeuchi等[9]的研究结论相一致。此外,叶冠林等[10]提出隧道管片外弧面上的各种施工荷载中盾尾注浆影响较大。朱合华等[11]对盾构施工全过程数值模拟,分析均布和非均布注浆压力对管片的影响。张鹏[12]建立了考虑接头非连续性有限元模型,探究千斤顶推力、盾尾注浆压力等荷载对衬砌结构的影响。张稳军等[13]综合考虑注浆压力、千斤顶推力和盾尾刷反力等施工荷载,构建了盾构隧道三维荷载结构模型,探究了管片接缝变形特征及其对密封垫防水性能的影响情况。
可见,盾构姿态变化对管片的影响主要通过作用在管片上的施工荷载变化体现出来。盾构掘进过程中,盾构姿态参数和掘进参数是不断变化的,取某一施工状态下的荷载作为评价影响的条件显然无法准确全面地反映盾构姿态动态变化对管片的影响。为此,现详细介绍盾构姿态参数和测量方法,总结分析盾构姿态的三维动态变化过程及其对管片结构内力影响的研究现状,并归纳盾构姿态的控制和纠偏技术措施,最后指出当前研究的不足并做进一步的研究展望。
1 盾构姿态参数
盾构姿态参数是在盾构掘进中实时测量所得的能够反映盾构机掘进位置和状态的一系列参数,包括刀盘切口中心和盾尾中心的三维坐标、盾构转动角、水平角以及俯仰角[14],如图1所示。

图1 盾构姿态参数示意图
1.1 盾构姿态角
盾构机可看作一个运动的筒状空心结构,它的姿态可以由图1中3个欧拉角表示。其中,转动角指盾构机绕自身中心轴线转动的角度,表征盾构刀盘反作用力引起盾构机旋转情况。当盾构掘进前方土质较硬时,盾构刀盘提供较大的扭矩或者推进系统产生不平衡推力,继而盾构机易发生整体扭转现象。此外,转动角一般控制在-3°~+3°,但当盾构掘进在含水量较大的软黏土或泥浆层时,盾壳与周围土层的摩阻力减小,引起盾构转动速度和幅度增大。该工况下,转动角控制值可放宽至-5°~+5°。俯仰角指盾构中心轴线与水平面之间的夹角,它表征盾构机掘进过程中垂直方向的偏转情况。水平角指盾构掘进方向在水平面上的投影与隧道设计轴线的夹角,它表征施工过程中盾构机在水平方向的偏转情况。上述3个参数可以统称为盾构姿态角,监测所得的姿态角结合盾构上任一固定点坐标,可得到盾构切口和盾尾中心坐标,即可确定盾构的位置[15]。
1.2 盾构偏差量
为了反映盾构掘进路线与隧道设计轴线的偏差情况,工程上常采用盾构机切口及盾尾的水平偏差量和竖向偏差量描述盾构掘进过程中的偏离情况。以杭海城际铁路海浙段盾构工程为例,盾构掘进1 500环区间内切口、盾尾的水平和竖向偏差量的整理结果如图2所示。其中两个方向偏差量的取值以坐标轴的正方向为正值,反方向为负值。

图2 盾构偏差量
由图2可知,盾构竖向偏差量最大可达117 mm,盾构机整体有向下趋势。盾构水平偏差量最大值为89 mm,左右平均变化幅度大约为30 mm。从整体偏差趋势上看,盾构刀盘切口和盾尾在水平方向上大体一致,而两个位置的竖直方向却差别较大。此外,盾构切口在竖直方向上围绕设计轴线中心不断变化。可见,盾构掘进过程中的姿态偏差量处于动态变化状态。为了掌握盾构的盾构机实时空间位置和运动趋势,需要对盾构姿态参数进行准确实时的测量,进而及时指导盾构姿态的控制与纠偏,保障管片的拼装质量和隧道的安全[16]。
1.3 盾构姿态参数测量
盾构姿态参数的实时测量是盾构姿态控制和调整的前提。目前,盾构姿态参数的测量方法可分为人工测量和自动化测量。
1.3.1 人工测量方法
人工测量法主要包括标尺法和三点法,目前在中国少部分地区仍在使用。标尺法又分为水平标尺法和前后标尺法。水平标尺法主要应用于管片姿态测量,布置如图3所示。
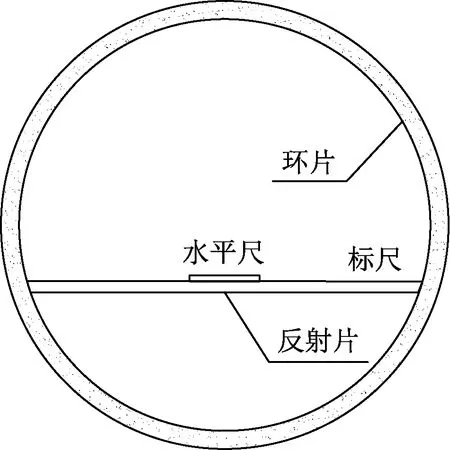
图3 水平标尺法布置图
前后标尺法是在盾构机内壁顶部分别固定水平前尺、水平后尺和坡度板,通过测量前后标尺的坐标可推算出盾构水平角,布置如图4所示。借助坡度板可以测得盾构的俯仰角和转动角,利用得到的姿态角可以得到盾首和盾尾的中心坐标。三点法也可解算盾构机的空间位置和姿态,但目前多用于辅助自动测量校核工作。需要指出的是,三点法和标尺法都只能在施工间隙操作,不能保证测量的连续性,且布置时间长,因此效率较低。
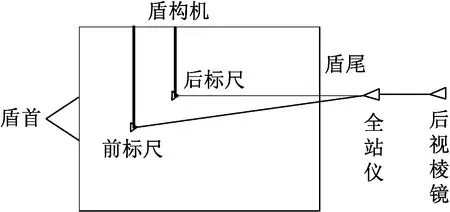
图4 前后标尺法布置图[17]
1.3.2 自动测量方法
目前,中外大多采用自动测量方法对盾构位置和姿态进行实时监测和导向,常用的自动导向系统有SLS-T系统、PPSGmbH系统、ZED系统、ROBOTEC系统、Tellus系统、RMS-D系统、MTG-T系统等[18]。工作原理主要有激光全站仪导向(测量机器人)和螺旋仪导向系统,全站仪导向系统又分为棱镜导向系统和激光靶导向系统,具体分类如图5所示。同时,选取6种中外盾构导向系统进行对比[19],如表1所示。

表1 常见的盾构导向系统[19]
盾构姿态自动导向系统测量相对于人工测量智能化程度较高,且具有较好的兼容性和开放性,目前朝着模块化、高精度、高智能化趋势发展,正逐步成为盾构姿态测量的主流方式[20]。此外,人工测量可以与盾构自动测量协同工作,对自动导向系统的测量结果进行人工复核[21],即自动导向系统的人工测控,检查和保证盾构机自动测量姿态的准确性和稳定性,并有效指导盾构沿设计轴线施工[22]。
2 盾构姿态变化对管片结构的影响
目前盾构隧道管片结构的影响研究主要集中在盾构运营阶段,且侧重结构的二维分析。然而,管片结构在运营阶段和施工阶段所受荷载存在很大的差异,尤其是盾构掘进过程中盾构姿态的变化和偏移是不可避免的,管片所受荷载方向和大小也是不断变化的。因此,考虑动态变化的施工荷载是研究盾构掘进复杂三维空间运动的关键。
2.1 盾构姿态变化过程
盾构掘进是一个动态变化的过程,受周围环境、盾构施工参数、操作水平等因素的影响。盾构姿态的变化主要与3条线密切相关,分别是盾构中心轴线、管片中心轴线、隧道设计轴线。盾构中心轴线可以直观地反映盾构瞬时姿态,但不能反映盾构姿态的偏离情况和运动趋势。管片中心轴线同样只能反映已拼装管片的瞬时姿态。三者之间的位置关系决定了盾构姿态变化的趋势和动态过程。
盾构施工过程中所受到的力总体可分解为盾构向前掘进的推力和引起盾构发生转动、倾斜等偏离隧道设计轴线的扭矩。盾构姿态变化如图6所示,盾构中心轴线与隧道设计轴线的初始夹角为θi0,其中i表示盾构偏离的隧道设计轴线方向,包括水平方向和竖直方向,千斤顶不均匀推力导致盾构产生一定的偏转扭矩M1,盾构角度变化Δθ1至θi1,并以此角度向前推进dx,此时盾构的受力平衡状态被打破,偏转扭矩变化至M2,角度变化Δθ2至θi2,盾构的受力从一个平衡状态到另一个新的平衡状态。可见,盾构机的位置受盾构角度变化的影响,因此测量盾构的角度变化对把握盾构姿态的变化趋势具有重要的参考价值。
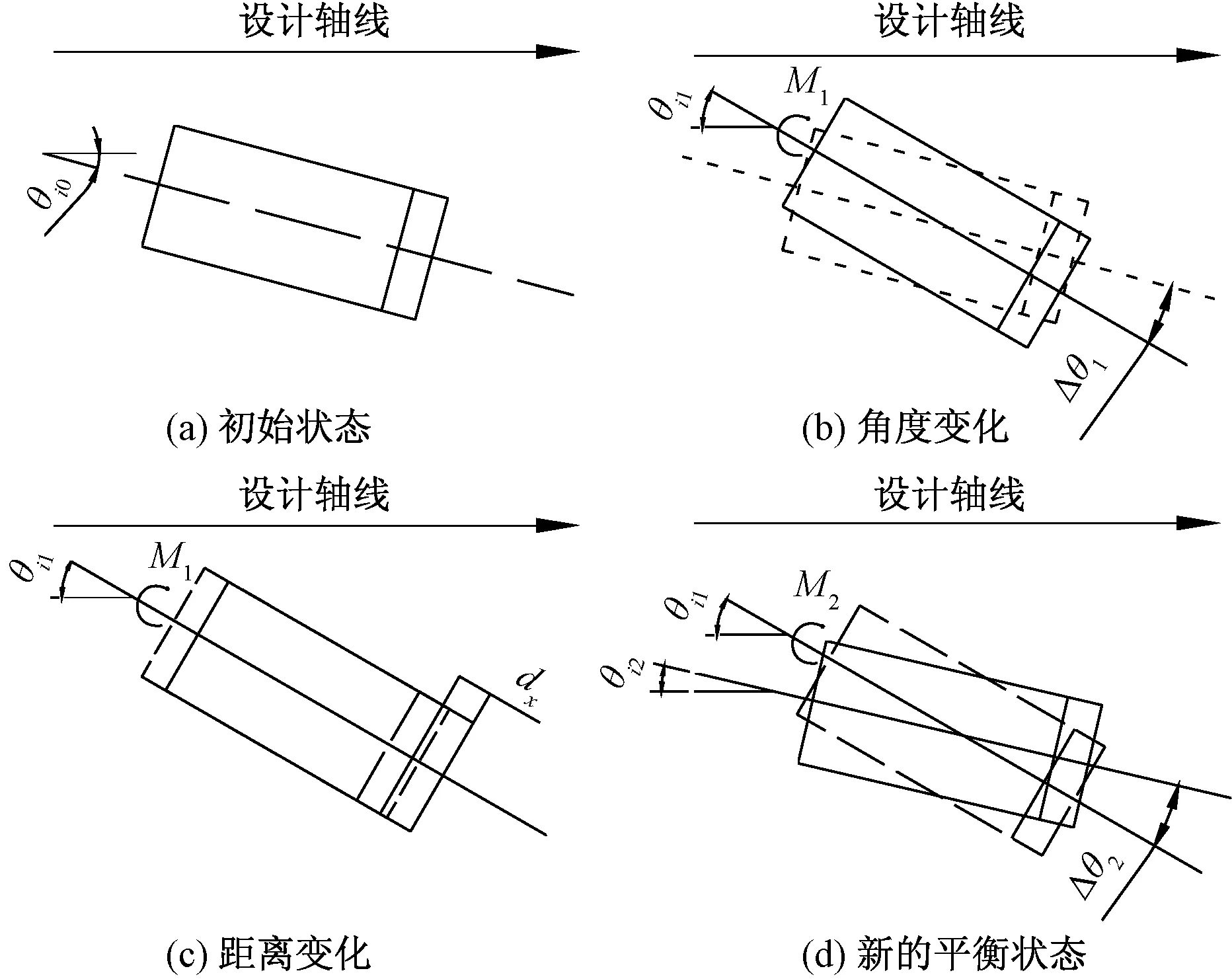
图6 盾构姿态变化图[23]
2.2 盾构施工荷载
大量盾构隧道工程案例表明,盾构姿态调整引起的盾构施工荷载变化对隧道管片结构有着显著的影响。施工荷载主要包括盾构挤压管片的作用力、千斤顶对管片的偏心推力、管片拼装荷载以及盾尾注浆压力,其受周围环境和盾构姿态的影响,不确定性较大。例如纠偏阶段的千斤顶推力主要表现为偏心荷载,与正常掘进阶段的作用力大小及方向相差很大。而且,当盾构掘进姿态控制不良时,盾尾易过度挤压管片,对拼装完成的管片产生挤压荷载等。
2.2.1 盾构-管片相互作用模型
日本许多研究者较早针对盾构施工时姿态控制不良而导致的盾尾挤压管片和壁后不均匀注浆引起的偏压力等问题,探究了隧道管片横向受力变形情况。其中,Sugimoto等[24-25]建立了考虑盾构开挖边界、小半径曲线盾构施工的土体超挖范围、盾尾间隙、刀盘转动方向、盾体滑行效应、土压力等因素的盾构姿态动力学模型,对盾构姿态影响管片结构受力做了初步的探讨。盾构荷载模型如图7所示。r、p、q表示模型3个坐标方向,从盾构荷载模型截面A-A、B-B、C-C可以看出,作用于盾构上的荷载可分为盾构自重f1、盾尾与管片接触力f2、千斤顶作用力f3、盾构前端作用力f4以及盾构外壳所受到的来自周围地层的土压力f5。

图7 盾构荷载模型[25]
宋克志等[26]提出将已拼装的管片一端看作固定端支座,另一端刚脱出盾尾的管片看作简支的受力构件,建立了管片三维力学模型,如图8所示。同时,基于该模型开展施工参数的数值模拟研究,表明盾构施工阶段管片变形和破损与盾构推进系统的推力大小、倾斜角度及偏差密切相关。

F1、F2为管片端部受到的千斤顶推力;p1、p2为管片结构受到的水土压力;q1、q2为管片结构受到的注浆压力
2.2.2 盾构对管片的挤压作用力
盾构机发生姿态偏斜时,盾构机的尾刷和壳体会挤压管片的外表面,导致管片发生错台变形,且盾构和管片接触位置应力集中引起管片破裂。Mo等[27]采用ADINA有限元程序建立了广州地铁某盾构隧道的三维数值模型,并考虑了盾构机纵、环向螺栓、盾尾钢丝刷的浆液硬化对管片的挤压作用。结果表明封顶块是整环管片受影响最大、最薄弱的部分,且管片裂纹集中在封顶块和邻接块。工程实际中应尽量避免盾构姿态右偏和盾构切口下偏两种偏转姿态。Yang等[28]通过对上海地铁某工程的现场观测和测量对盾构隧道管片的开裂和损伤进行了研究,发现盾构机与管片之间的姿态偏差所引起的盾构挤压管片外表面是导致隧道管片接头位错、管片损坏和开裂的最主要原因。
2.2.3 盾构千斤顶对管片的偏心推力
盾构前进是通过千斤顶撑靴作用在管片上提供的顶推力实现的。当盾构姿态发生变化时,千斤顶的撑靴顶推力重心与管片中心不一致会导致撑靴与管片接触状态变化,继而出现局部应力集中导致管片破裂,如图9所示。
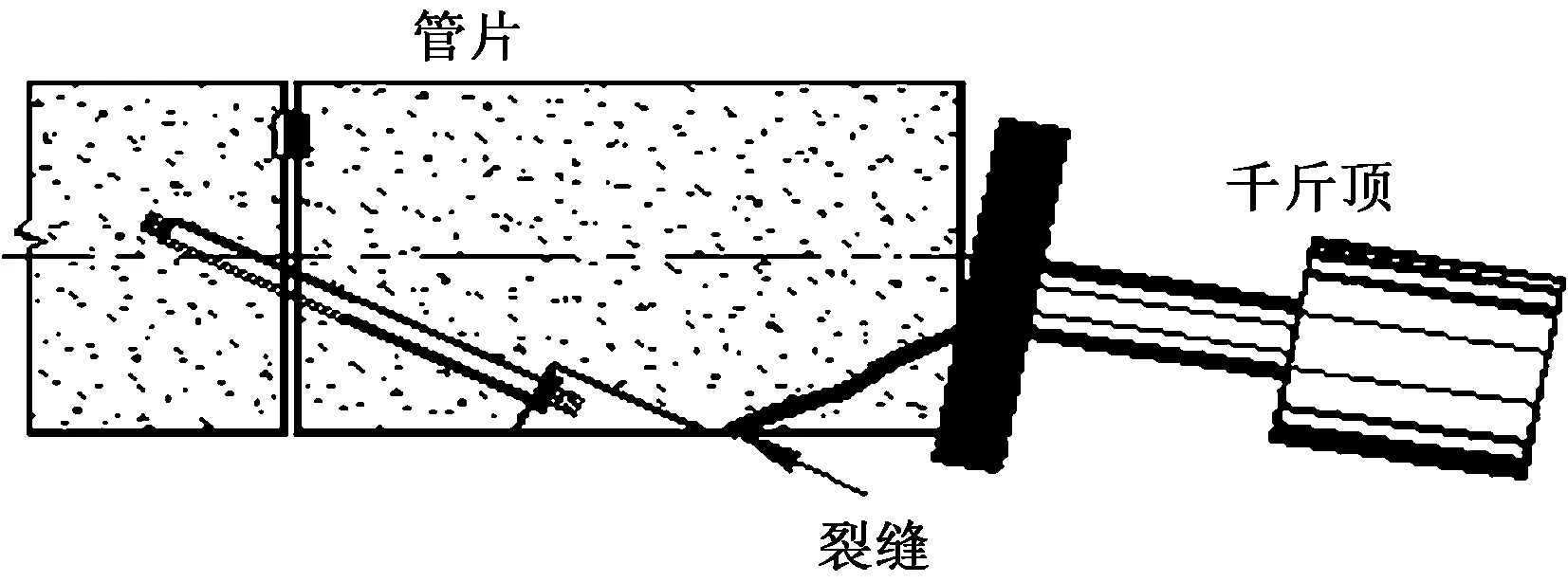
图9 局部管片破坏
傅帅帅[29]采用细化梁-接头不连续模型模拟不同的千斤顶推力和偏角,探究其对管片及其螺栓的受力影响,提出推力大小和角度的改变对管片环向螺栓影响显著,但最佳的盾构推力值和推力偏角尚需进一步深入研究。孙昌海[30]进一步探究了盾构机掘进时上、下、左、右4个方向千斤顶不同顶推角对管片位移和应力的影响,发现千斤顶偏角对未脱出盾尾的管片位移影响较大。而且,盾构向下偏移掘进过程中调整千斤顶偏转角为2°时管片应力最小,受力更合理。郝志强等[31]基于南京轨道交通工程岩溶集中段研究管片上浮问题,发现随着盾构千斤顶总推力的竖向分力增加管片上浮趋势增加,且其分力受盾构姿态的影响,可控制盾构机姿态在一定范围内改变以减小管片上浮趋势。邓尤东等[32]针对大纵坡隧道施工时的掘进推力控制不当易造成管片错台、上浮等问题,探究发现大纵坡隧道管片受偏心顶推力所产生的附加作用力主要体现在盾尾管片结构上产生的纵向反向错动、纵向剪切应力以及轴向扭转应力的局部集中效应。
2.3 特殊工况下管片受力特点
2.3.1 双圆隧道
双圆盾构隧道施工时若遇到土质不均、地层软弱或者施工操作不当等情况,极易发生侧向滚动偏转,因此需要对掘进过程中的盾构姿态进行纠正。然而,纠偏过程中由于千斤顶推力方向偏离和大小不均衡会对拼装完成管片产生一定的附加偏转力矩,导致管片内力发生复杂变化。然而,现行双圆盾构隧道管片结构计算模型尚未考虑盾构姿态纠偏过程对管片产生的附加荷载,如图10所示。
沈水龙等[33]考虑双圆隧道纠偏过程中产生的附加荷载建立有限元模型,分析不同纠偏角度α引起的管片内力响应情况,纠偏计算模型如图11所示。结果表明,双圆盾构掘进过程中纠偏所引起的管片内力变化显著,且纠偏角度不宜过大。工程实践中需要根据盾构机和施工现场情况将纠偏角控制在较小的范围内。

图11 双圆盾构隧道衬砌上的纠偏力矩[33]
2.3.2 小曲率曲线盾构隧道
目前,中外涉及盾构掘进对管片受力影响的研究主要是以直线线型为主。随着地铁建设进程的加快,隧道的线型趋于复杂,小曲率半径曲线盾构段越来越多。相对于直线盾构,小曲率曲线施工对管片结构和周边环境的影响更加显著,同时盾构姿态控制与纠偏也面临更大的挑战。
由于盾构机可以近似看成直线型刚体,曲线段盾构掘进的实际轨线很难与隧道设计曲线重合,实际是由一段段连续折线组成的一种弧线,如图12所示。曲线段盾构掘进过程中需要连续纠偏,且转弯半径越小,实际运动轨线与隧道设计曲线拟合困难越大,对管片结构的影响越大。
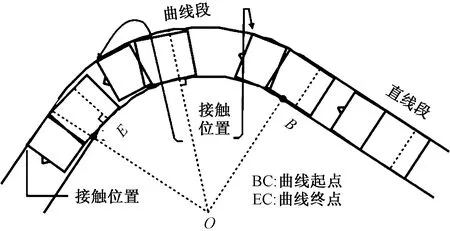
图12 曲线盾构掘进
为了满足盾构机沿曲线掘进的要求,一般是通过调整左右推进油缸形成一个推力差,千斤顶会对管片结构产生一个水平分力,管片在脱出盾尾时会有向曲线外侧偏移的趋势,因而容易产出管片错台现象。当水平分力较大时,管片姿态与盾构姿态严重不协调,盾构机中心轴线与管片轴线会存在一定夹角,盾尾对管片产生挤压作用,严重时会导致管片接缝渗漏水和局部损坏等病害。此外,千斤顶向上的分力和同步注浆浆液向上的浮力可能导致管片上浮。同时,相邻管片间的位移对螺栓及其周围混凝土产生一定剪切力,导致管片开裂。并且,管片间还存在斜向应力,使得管片内外侧角部位置极易发生局部损坏。
2.4 管片破坏形式
一般情况下,盾构姿态不良或控制不当容易导致管片错台和开裂现象相伴而生,如图13所示。实际盾构掘进过程中,管片姿态和盾构姿态不能保持理想的同步状态,尤其在小曲率曲线段、竖曲线段和纠偏较大的区间段,管片外壁与盾尾间距沿隧道纵向和环向分布不均衡,容易导致盾尾挤压管片发生“卡壳”现象。

图13 管片错台及开裂
王宏[34]、谢远堃[35]探究小半径并大坡度盾构施工引起管片破损及上浮,并提出了相应的技术控制措施。秦建设等[36]着重从盾构挤压管片入手,讨论了盾构姿态控制不当引起管片错台及错台后管片外侧开裂问题。根据管片与盾构姿态跟踪实测数据,发现管片的错台量随着管片拼装的进行不断增大,在刚脱离盾尾时达到最大。苏昂[37]基于扩展有限元理论建立了管片精细化三维模型,探究了千斤顶内、外向偏心荷载下管片的裂纹扩展规律。卢岱岳等[38]进一步探究带榫管片在千斤顶偏心荷载、千斤顶加压不同步以及曲线段千斤顶推力不均3种情况下的管片裂纹位置、扩展方向和分布规律。
3 盾构姿态的控制与纠偏
盾构隧道施工中,盾构姿态的控制与纠偏关系到隧道管片结构以及周边环境的安全。《地下铁道工程施工及验收规范》(GB/T 50299—2018)中规定盾构中心轴线平面位置和高程允许偏差均为50 mm,若实际施工中超过允许值,则需要采取合适的纠偏手段控制偏差。
3.1 盾构姿态自动控制系统
中外学者针对盾构姿态控制系统进行了一系列的研究。酒井邦登等[39]建立了自回归模型判断盾构机的具体方位,并创造性地提出了利用卡尔曼滤波理论来初步预测和控制盾构姿态。桑原洋等[40]设计了一种模糊控制器,探究了模糊控制理论在控制盾构姿态中的可行性,并提出了单向推进度的理论。随后仓冈丰[41]将桑原洋的成果应用于工程建设中,同时也是盾构姿态自动控制系统第一次应用实践。清水贺之等[42]将人工智能和模糊控制理论相结合应用于盾构姿态调整,通过与人工控制精度比较分析,证明了自动控制系统的控制精度更高。Kasper等[5]建立盾构掘进三维模型,在仿真过程中研发了一种自动转向的算法。Koyama等[43]首次将自动轨迹跟踪控制技术应用于盾构掘进线路的监测和控制。
胡珉等[44]首次将模糊控制理论应用于中国隧道建设中。Yue等[45-46]进一步研发了滑模鲁棒控制器和荷载观测器,形成一套更加完备的盾构姿态动态协调控制系统。为了适应不同的地层条件,王林涛[47]设计了一种可跟踪隧道设计轴线和实时匹配盾构推进系统分区液压缸运动特征的盾构姿态控制系统。Zhou等[48]采用深度学习模型,给出了盾构掘进姿态和位置的预测框架,通过武汉长江三阳路跨江隧道工程验证了该方法的可行性和性能。杨宏燕[49]基于盾构纠偏智能控制装置建立了纠偏输出控制策略快速自学习方法,并在上海北横通道东线隧道施工全程成功应用。夏汉庸等[50]基于机器学习并结合施工参数、盾构掘进数据进行集预处理和特征提取,构建盾构姿态预测模型,模型精度可达到94.31%。张强等[51]基于空间齐次变换矩阵元素的位姿正解求解方法建立盾构机位姿正解解算模型,其误差在0.018%左右,为盾构掘进位姿的监测与控制提供了理论基础。
3.2 盾构姿态控制与纠偏措施
盾构姿态的控制与纠偏内容主要包括左右偏移的平面控制、上下俯仰的高程控制以及绕盾构中心轴线转动的滚动控制3个方面,因此要综合考虑实际盾构掘进行为变化特征,并采取相应的控制与纠偏措施。
3.2.1 盾构始发、接收阶段
盾构始发架决定盾构机的初始掘进姿态,在出洞前应严格控制始发架的精度[52],并使其轴线与隧道设计轴线保持一致。考虑隧道后期沉降和土层情况,盾构实际掘进轴线要适当高出隧道设计轴线15 mm左右为宜[53]。盾构机进洞时,应严格把控掘进参数,如减缓掘进速度和刀盘转速,减小油缸推力,保证管片中心轴线与盾构机中心轴线重合,以减小管片出盾尾时受到的弯曲应力。
此外,盾构机在始发和接收前会对洞口土体进行一定加固,因此盾构机进、出洞时,应准确调节推进系统千斤顶油压差来控制盾构姿态,防止因土层软硬不均和自身重力作用发生“嗑头”“抬头”等不良现象。吴发展等[54]提出了暗挖隧道内盾构砂浆体接收施工技术,可防止涌水涌砂出现,抑制地表沉降及结构变形,保证盾构安全出洞。姜留涛等[55]模拟小曲率曲线段沿割线始发盾构姿态,研究曲率半径和盾体长度对盾构姿态偏移量的影响规律,进而提出沿割线方向预设偏转角或盾尾预偏移量的盾构姿态控制方法。
3.2.2 盾构掘进阶段
(1)管片的选型。合理的管片选型是管片姿态控制的重要一环,尤其在转弯段或变坡段掘进时。管片姿态直接影响盾尾的空间状态,盾构姿态的变化同时也会引起盾尾间隙的改变,因此,为保障盾尾间隙不超过允许范围内,管片选型可能存在一定的局限性。实际工程中根据盾构姿态调整幅度选择不同楔形量和宽度的管片,当调整幅度过大且管片尺寸受限时,可以在管片环面粘贴不同规格的低压石棉橡胶板,为了提高石棉橡胶板的质量,应该控制好压缩率(通常12%为宜)[56],使之受压后形成平整的楔形环面,以达到纠偏的目的。
(2)盾构千斤顶。盾构掘进过程中通常利用盾构推进系统分区控制原理,即调整上、下、左、右液压缸的行程差或推力来控制盾构机平面位置和竖向坡度的运动轨迹[57-59],行程差不能太大,一般应控制在20 mm以内,预先计算好千斤顶的控制行程,并根据自动测量系统反馈的数据实时控制[60]。何祥凡等[61]基于盾构穿越上软下硬地层的工况对千斤顶推力进行优化,并给出盾构推进系统上中下顶推力的参考比值,同时增大土仓压力可抑制地表变形。张学桥[62]探究了小曲线半径盾构姿态关键技术,为防止纠偏过大,相对区域千斤顶的伸出长度差控制在20 mm以内,油压差控制在5 MPa以内,每次纠偏量控制在2~3 mm/m。一般情况下盾构的转动角要控制在±0.3°以内[63]。
(3)铰接系统。当盾构纠偏角度较大时,一般可借助盾构机的铰接系统实现纠偏,但角度控制有限。当在特殊工况如小曲率或大坡度曲线掘进施工时,盾构姿态控制难度加大,可通过调整铰接油缸并将铰接装置暂时锁定,防止盾构姿态在纠偏过程发生失控现象[64]。此外,由于传统的平面铰接提供的转弯半径有限,朱雷等[65]研发了适用于小曲率转弯盾构的球面结构铰接液压控制系统,该系统盾构姿态控制灵活,可更好地实现转弯控制及姿态复位。
(4)超挖刀。超挖刀是应对大幅度调整盾构姿态的工况是一种行之有效的方法,可有效避免盾构机出现“卡壳”现象,减轻纠偏方向的水土压力,有助于实现变坡和转弯。为了避免地表和隧道结构变形过大,超挖量应不超过地层损失的1.5‰,地表日沉降量控制值不超过3 mm。郝润霞[66]探究软土地区曲线段盾构施工超挖量与同步注浆量的关系,并与直线段对比分析,提出曲线段盾构注浆控制标准。但是,目前小曲率曲线隧道施工过程超挖刀的伸长长度、开挖范围以及铰接角度的取值仍停留在工程经验层面,受操作人员的主观影响较大,无法适应三维复合小曲率隧道施工。对此,陈剑等[67]提出了适应复杂三维复合曲线隧道的超挖量和铰接角理论算法,并通过实际工程案例验证该算法的可行性性。
(5)其他措施。在偏移方向及时进行二次注浆填充间隙,可以加固土体和固定管片来抵抗管片的偏移,且需要严格控制注浆压力[68]。掘进过程中及时对管片螺栓进行复紧,减少管片的错台和上浮。盾构掘进中若盾构掘进线路偏离过大,且通过上述纠偏措施无法回到设计轴线时,可以考虑调整设计线路进行补救,若是依旧行不通,建议在原基坑基础上,利用盾体支撑技术开挖深基坑的方式实现纠偏[69]。
综上,地铁盾构施工过程中,盾构姿态控制与纠偏关乎隧道安全,而影响盾构姿态的因素很多,工程人员需要具备一定的实操经验和预判能力,把握纠偏量和纠偏时机,做到勤纠少纠。综合考虑盾构机和管片类型、土层情况、设计路线等,采取合适的纠偏措施,以期快速高效地调整盾构姿态。
4 存在问题与研究展望
详细介绍了中外学者关于盾构姿态变化对管片结构影响和相应控制技术方面的研究成果,尚存在一些问题需要进一步探讨,总结如下。
(1)完善测量体系。盾构姿态自动导向系统应进一步提高系统的硬件测量精度、软件计算精度和显示精度,同时注重人机交互界面的人性化、操作的智能化。重点关注人工移站阶段测量数据的不连续性影响,同时采取有效的复核手段降低人工移站对系统的影响。
(2)全面考虑施工荷载。中外在施工期管片衬砌结构受力特性的影响因素及评价方面,对盾尾壁后不均匀注浆压力和千斤顶偏心推力的研究已做了大量的工作。但对于盾构姿态变化过程中盾尾对管片的挤压力以及管片本身的拼装荷载的探究相对不足,不可忽视这些荷载与三维空间中盾构姿态的紧密关系。同时,各施工荷载应反映实际工况,受周围环境、盾构施工参数、掘进参数等影响,不确定性比较大。因此,在隧道管片结构设计中应考虑纠偏引起的内力重分布的作用。
(3)管片模拟精细化。研究盾构姿态对管片内力的影响应该考虑管片衬砌本身的材料特性、接头方式、拼装方式。管片的材料特性包括混凝土强度等级、钢筋配筋率和直径。管片接头处和各螺栓孔的局部受力情况需要进一步精确模拟,有助于优化管片设计和指导盾构姿态的控制。
(4)盾构姿态动态三维数值模拟。现有关于管片结构力学模型的研究主要以静态分析为主,即选取盾构姿态动态变化中某一阶段的荷载施加到管片结构模型上分析管片力学响应,却未考虑盾构掘进过程中姿态动态调整的影响,这与工程实际有较大的出入。因此,建立可以充分体现动态变化的盾构掘进三维姿态模型,具有重要的工程意义。
(5)模型试验和理论研究。目前已有的研究方法主要以建立管片结构力学模型的数值模拟并结合实测数据对比分析为主,模型试验和理论研究尚不多见。由于施工荷载的不确定性和复杂性,考虑盾构姿态变化的施工全过程盾构-管片相互作用的模型试验必不可少,并且不同研究方法的对比分析更有助于结果校验和应用。
(6)探究姿态参数对盾构姿态的控制效应。针对盾构姿态参数如俯仰角、水平角和转动角的变化和调整研究,是解决盾构-管片、盾构-土体相互作用影响的关键一环。而且,盾构姿态变化过程中盾构-土相互作用是复杂的多相耦合问题,如何基于盾构与土相互作用机理,探究姿态参数对盾构姿态的控制和纠偏将是未来的研究重点。
5 结语
在盾构施工过程中,盾构姿态是一个持续变化的三维空间问题,其动态变化和不可确定性决定了盾构姿态变化对管片受力影响研究课题的复杂性。系统总结了盾构姿态变化对管片的影响和盾构姿态控制技术的研究成果,以期能够引起更多学者对相关问题的关注,并且为开展更为广泛的研究提供一些启发和有益参考。
