风场干扰下四旋翼无人机的飞行控制与仿真
2021-08-04杨永刚
杨永刚,宋 炜
(中国民航大学a.通用航空学院;b.航空工程学院,天津 300300)
四旋翼无人机具有机动性强、操作方便等优点,在农林灌溉、物体追踪和航拍等多个领域均得到广泛的应用[1-3]。由四旋翼无人机的数学模型可知,其具有欠驱动、半耦合、多变量、非线性等特点。通常四旋翼无人机的几何尺寸较小,小尺寸设计使得其惯性大大减小,且在实际飞行过程中存在外界环境干扰和建模不确定性等问题,因此,四旋翼无人机稳定控制是研究的焦点。
针对四旋翼无人机的控制稳定问题,国内外学者提出了多种研究和控制方法。当前主要分为两类:线性控制方法和非线性控制方法。文献[4]研究了四旋翼飞行器在空间定点位置的控制问题,并针对该问题设计了模糊PID(proportion integration differentiation)控制器。文献[5]针对四旋翼剧烈振动导致的数据变异和漂移设计PID 控制器。文献[6]针对Quanser Qball-X4 四旋翼飞行器的位置跟踪问题,设计了LQR(linear quadratic regulator)控制器。文献[7]针对一个固定翼飞机四维航路点追踪进行LQG(linear quadratic gaussian)控制方案设计与测试。文献[8]对四旋翼系统进行建模,并设计H∞控制器提升控制性能。然而这些线性控制方法是在无人机的某个状态下进行假设并线性化,实际应用时,一旦无人机偏离此状态,实际模型与简化模型会有较大差别,故线性方法存在一定局限性。由于对无人机的准确控制要求增加,在控制系统设计上应考虑系统的非线性控制。目前,非线性控制方法中,滑模控制、自适应控制、动态逆控制、反步法等被学者广泛关注。文献[9]在参数不确定性情况下,对飞行器采用了鲁棒自适应滑模控制器,验证了该控制器的有效性,但没有考虑陀螺仪效应带来的影响。文献[10]针对四旋翼飞行器在导航环境下的起降操纵,提出了基于嵌套饱和和广义比例积分(GPI)的控制器组合。文献[11]研究了四旋翼无人飞行器的轨迹跟踪控制问题,通过设计带有模糊观测器的滑模控制器实现飞行器轨迹的跟踪,但忽略了不确定的影响。文献[12]设计了基于自抗扰算法的位置控制器。文献[13]设计了一种实时模型预测控制器,对四旋翼飞行器的飞行姿态进行控制。文献[14]设计了自适应控制器控制四旋翼飞行器的姿态和高度。文献[15]设计了比例转换的姿态滑模控制器及指数趋势线率的姿态滑模控制器。文献[16]针对四旋翼飞行器存在参数不确定性的情况,提出了一种将神经网络自适应方案与滑模控制相结合的方法。
目前,针对上述不同非线性控制方法的分析集中体现在四旋翼无人机姿态和位置追踪控制稳定上,没有考虑在外界风场干扰下仍能维持原来的稳定状态。随后提出的非线性反步法得到广泛关注,并被推广到输出调节问题、自适应控制、鲁棒控制、滑模变结构控制等领域。在设计不确定系统的鲁棒或自适应控制器方面,特别是当干扰或不确定性不满足匹配条件时,反步法具有明显的优越性。
基于反步法相比较其他控制方法具有的优势,文中采用了非线性控制方法反步法,引入了外界风场干扰,设计了四旋翼无人机双闭环控制算法,建立了非线性数学模型,保证在风场干扰和正常情况对比下,该模型能准确地反映系统动态特性;将无人机系统分成位置外环和姿态内环,降低系统的控制难度,运用Lyapunov 稳定性理论,分析了闭环系统的稳定性,确保了四旋翼无人机飞行时有效的轨迹追踪控制。
1 无人机位置姿态控制模型
在四旋翼无人机建模前,对模型进行一定简化,提出以下3 点假设[17]:
(1)四旋翼无人机是刚体,飞行时质量不变;
(2)四旋翼无人机的质量和形状关于中心对称;
(3)四旋翼无人机小角度低速飞行时,忽略空气阻力。
四旋翼无人机模型基于地面坐标系和机体坐标系建立。地面坐标系依照东西南北方位,x 轴的方向沿着北方位,y 轴的方向沿着东方位,z 轴垂直两轴的平面;机体坐标系中,机体中心在坐标原点上,x 轴指向机头方向,z 轴垂直x 轴向下,运用右手定则确定y轴方向。
由地面坐标系和机体坐标系得出无人机6 个自由度为(x,y,z,φ,θ,ψ),x,y,z 分别为相对于地面坐标系的无人机位置,φ,θ,ψ 为机体坐标系与地面坐标系的夹角,分别为滚转角、俯仰角、偏航角。
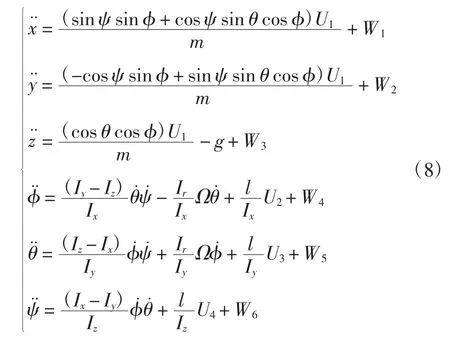
忽略飞行时受到的阻力,进一步对四旋翼无人机进行受力分析,再由牛顿定律得出此时的线运动方程[18]为

式中:U1表示无人机四旋翼上的总升力;m 为四旋翼无人机质量;g 为重力加速度。
四旋翼无人机飞行通过电机的转矩来控制U1、U2、U3和U44 个输入量,进而控制无人机的位置和姿态输出量,此时的U1、U2、U3、U4表示为
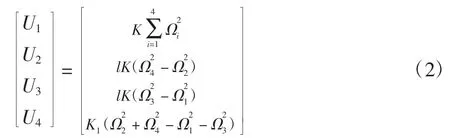
式中:U2、U3和U4分别表示作用在螺旋桨x,y,z 轴上的力矩;Ω1、Ω2、Ω3和Ω4分别为4 个旋翼的转速;l 为旋翼转动轴距离机体中心的长度;K 为升力系数;K1为转矩系数。
由欧拉方程得出此时的角运动方程[19]为
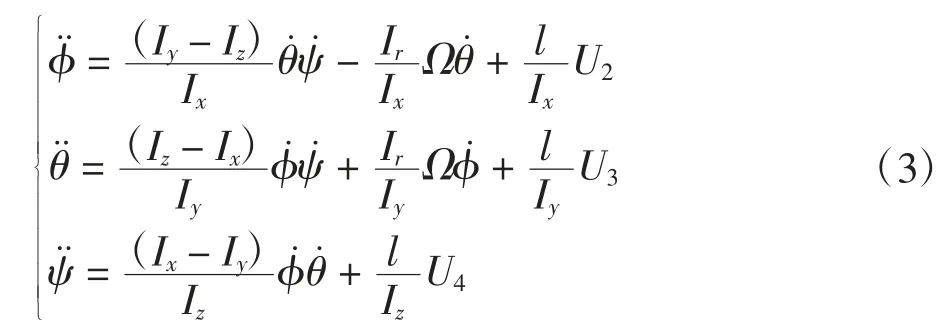
式中:Ω 四旋翼总转速;Ix、Iy、Iz分别为x、y、z 轴的转动惯量;Ir为旋翼的转动惯量。
2 风场干扰下模型的确定
2.1 风场模型及仿真
自然风具有突发性、持续性、周期性和不确定性等多种特点,为了更好地模拟自然风,可采用以下方式建立风场模型[20]。
1)基本风速模型
基本风速描述整个过程风力的基本值,表示整个过程的风力基本大小,具备稳定的特性,用常值a 表示,即基本风速

2)渐变风速模型
风力逐渐增大或减小的过程,可使用渐变风速来表示,使用一个线性分段函数

式中:Vmax1为渐变风速的峰值;t0为开始时间;t1为某个位置的时间;t2为结束时间。
3)随机风速模型
在飞行高度上,描述风速的随机性可表示为

式中:Vmax2为随机风速的峰值;Rand(-1,1)为-1 到1之间均匀分布的随机数;ωn为π/6。
由式(4)~式(6)可得作用于无人机上的模拟风速为

将式(7)通过Matlab/Simulink 实现,其风场模块结构和仿真结果如图1 所示,其中,设定的参数为:Vd=3 m/s,Vmax1=2 m/s,Vmax2=4 m/s,t0=2 s,t1=6 s,t2=10 s。
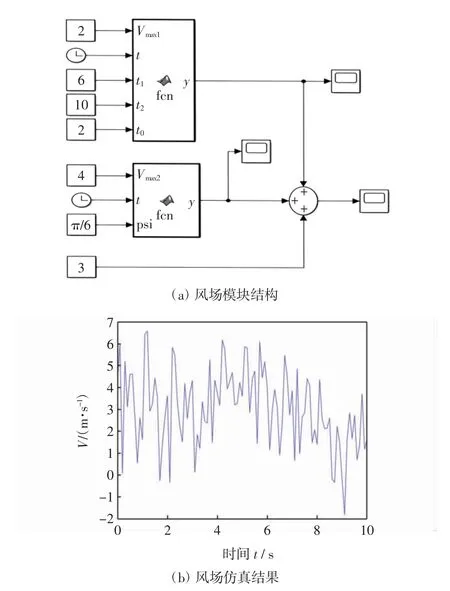
图1 风场模块结构与仿真结果Fig.1 Module structure and simulation result of wind field
2.2 风场干扰下位置姿态控制模型
在式(1)和式(3)基础上可得到风场干扰下位置姿态控制模型为
式中W1,W2,W3,W4,W5,W6为风场的扰动量。
3 反步法控制器的设计
对于反步法控制器的设计,首先是位置控制,输入3 个期望值xd、yd、zd,通过3 次反步法可以求出U1和两个虚拟控制量ux、uy,U1控制量控制高度z,而ux、uy是关于3 个姿态角的表达式,因此,x、y与3 个姿态角相互耦合。通过ux、uy可以反求出俯仰角和滚转角的期望值,再与输入的第4 个偏航角的期望值结合,作为姿态控制器的输入,再次通过3 次反步法求出3个姿态角的控制量U2、U3、U4,将4 个控制量代入数学方程可以得到6 个自由度。考虑外界风场干扰的四旋翼无人机整体控制如图2 所示。

图2 四旋翼无人机整体控制框图Fig.2 Control block diagram of quad-rotor UAV
在风场干扰下位置姿态控制模型中结合反步法,将式(8)用微分方程表示的数学模型转化为用状态方程X=f(X,U)来表示,以进一步使用反步法实现控制量的稳定[21]。在此方程中,X 是6 个自由度状态量及其一阶导,U 是4 个控制输入量,即

此时,引入xi(i=1,2,…,12)按顺序表示X 的变量,如令x1=φ,x2=φ˙,式(8)的数学模型可表示如下
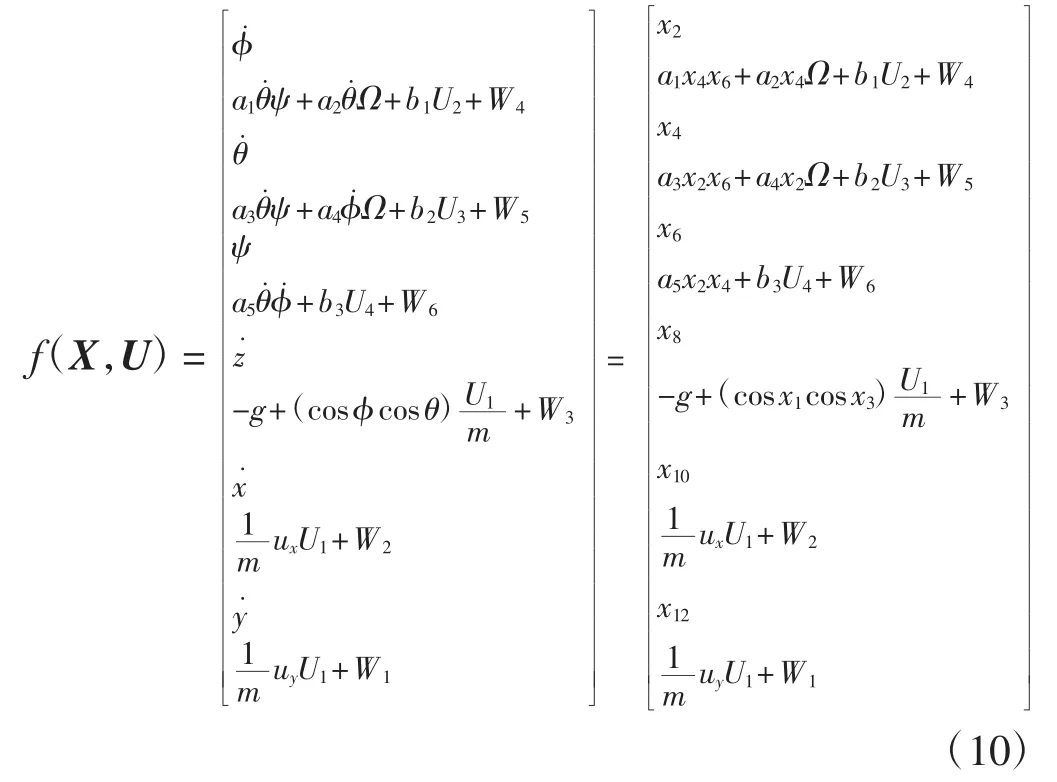
式中:a1=(Iy-Iz)/Ix;a2=-Ir/Ix;a3=(Iz-Ix)/Iy;a4=Ir/Iy;a5=(Ix-Iy)/Iz;b1=l/Ix;b2=l/Iy;b3=l/Iz;ux=sin θ cos φ×cosψ+sin φ sin ψ;uy=sin θcos φ sin ψ-sin φ cos ψ。
定义误差变量:z7=z-zd=x7-x7d,z8=x8-x8d。定义Lyapunov 函数:。令α(ii=1,2,…,12)为控制器的参数变量,则




由于引入xi表示X 中的变量,可知x8=z˙,则x˙8=-g+(cosx1cosx3)U1/m+W3,从而推导出

综上,控制输入量U1的取值驱动z7和z8趋于平稳。同理,可以解算出位置x,y的控制量为

同时,根据式(10)可以反解得到
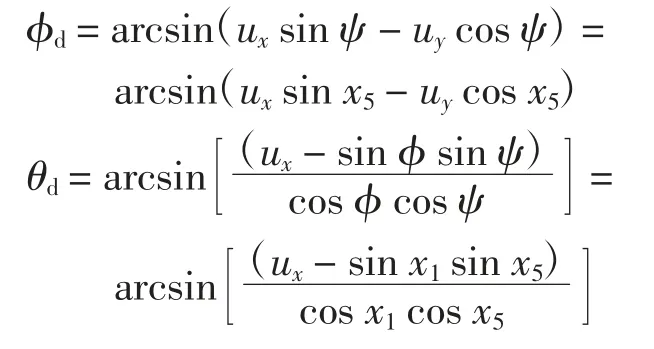
令
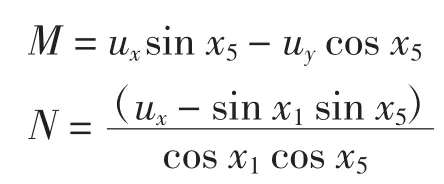
当M超出(-1,1)时,φ 不存在;N超出(-1,1)时,θ 也不存在。当M>1 时,取M=1;当M<-1 时,取M=-1;N取值同上。综上,通过反步法推导出了x、y、z的控制输入量ux、uy、U1。
相应地,可以解算出U2、U3和U4为

4 仿真分析
四旋翼无人机模型参数[22]如表1 所示。

表1 四旋翼无人机模型参数Tab.1 Model parameters of quad-rotor UAV
仿真分析中,位置和姿态角的初始值为(0,0,0,0,0,0),位置期望值为(3,4,3),俯仰角和滚转角期望值均为0.5,偏航角期望值设为3。无风场干扰下控制器参数设置如下:α1=1.5,α2= 20,α3= 1.3,α4= 13,α5=1.5,α6=5,α7=1.5,α8=5,α9=1.5,α10=5,α11=1.5,α12=5。有风场干扰下的控制器参数设置如下:α1=3,α2=42,α3=2.95,α4=45.28,α5=2.1,α6=150,α7=2,α8=150,α9=2,α10=150,α11=1.7,α12=150。
为了验证反步法的有效性,利用反步法先后建立无风场干扰下和有风场干扰下的控制模型进行对比,位置、姿态角、轨迹的跟踪效果,如图3~图5 所示。
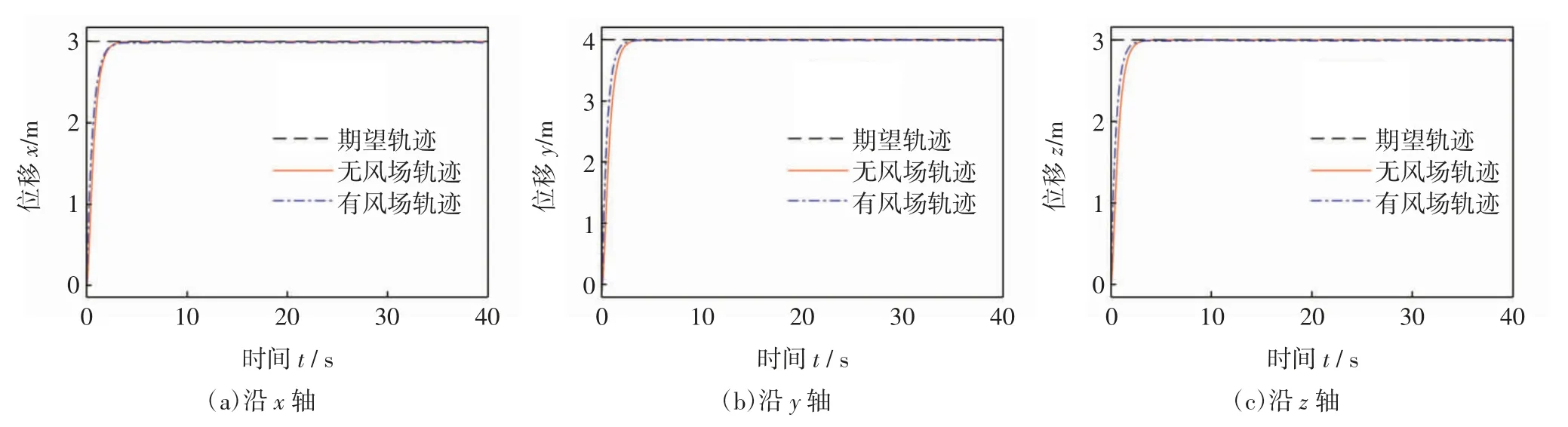
图3 有、无风场作用下位置跟踪曲线Fig.3 Position tracking curve with/without wind field disturbance

图4 有、无风场作用下姿态角跟踪曲线Fig.4 Attitude angle tracking curve with/without wind field disturbance

图5 有、无风场作用下轨迹跟踪曲线Fig.5 Trajectory tracking curve with/without wind field disturbance
图3 表示有、无风场作用下位置的跟踪曲线,对比可知,设计的反步法控制器对预期的期望值(x,y,z)跟踪效果较好,响应时间为4 s。图4 表示有、无风场作用下姿态角的跟踪曲线,从图4 中可看出:偏航角ψ期望值可以快速达到稳定,响应时间为4 s;在风场干扰下,滚转角和俯仰角产生波动,而设计的反步法控制器能快速响应调节,使其均在1~2 s 内重新达到稳定。图5 表示有、无风场作用下四旋翼无人机轨迹跟踪曲线,对比可知,对期望轨迹跟踪设计的反步法控制器有较好的控制效果。
图6 表示控制输入量U1,U2,U3,U4变化,反映了自然风的作用对滚转角和俯仰角影响较大,对偏航角影响较小,此时需要快速调节控制量U2和U3,使滚转角和俯仰角达到稳定。

图6 风场干扰下控制输入量的曲线Fig.6 Control input curve under wind field disturbance
由以上仿真结果分析得,设计的反步法控制器在风场干扰下也能快速响应使系统达到稳定,有较好的鲁棒性。
5 结语
采用牛顿定律、欧拉方程建立了四旋翼无人机的位置姿态控制模型,同时设计了基于反步法的位置(外环)控制器和姿态(内环)控制器。考虑风场影响,建立了自然风的风场模型,在外界风场干扰下,重新设计反步法控制器。运用Matlab/Simulink 仿真对二者进行对比验证得出以下结论:
(1)建立的位置姿态控制模型在有、无风场干扰下都能准确地反映系统动态特性;
(2)在风场干扰下,设计的反步法控制器也能保持姿态稳定,并快速、精确地达到期望值。