千寻位置与RTK技术在电力工程测量中的比较分析
2021-07-27曾群意郭忠臣胡茂林任尚勇
刘 洋,曾群意,郭忠臣,胡茂林,任尚勇,黎 洋
(1.中国电力工程顾问集团西南电力设计院有限公司,四川 成都 610021;2.宿州学院环境与测绘工程学院,安徽 宿州 234000)
0 引言
RTK具有操作简便,测站间无需通视,可实时获得厘米级三维坐标成果的优势,是目前电力工程测量中广泛应用的定位技术[1]。但RTK技术存在服务半径较小、精度随流动站与参考站距离的增大而衰减的缺点[2-4]。连续运行参考站(continuously operating reference stations,CORS)是基于多基站网络RTK技术由GNSS基准站网、数据处理中心、数据通信链路、用户部分组成,利用区域内构成网络的多个参考站为用户实时提供改正信息,从而获得高精度坐标成果的服务系统,网络RTK具有服务范围广,定位精度与可靠性高的优势[5-8]。
千寻位置基于北斗卫星导航系统(BDS)基础定位数据,同时兼容GPS、GLONASS、Galileo卫星导航系统,依靠云计算和大数据技术,为全国范围用户提供7×24 h全天候的定位服务。千寻位置拥有超过2200个地基增强站及自主研发的定位算法,主要提供千寻跬步Find m(亚米级)、千寻知寸Find cm(厘米级)和千寻见微Find mm(毫米级)三种高精度定位服务[9-10]。黄永帅[11]等对千寻位置北斗地基增强网络的RTK与实时动态码相位差分技术(real time differential,RTD)定位服务性能进行了测试与研究;刘东军[12]对千寻位置与CORS的测量精度进行了对比分析。本文对千寻位置与常规RTK的观测数据质量与精度进行对比研究,对理想与不良观测环境中的电力测量工作提供参考。
1 理想观测条件下分析
选择三台同型号天宝R10接收机,一台架设在开阔且无电磁干扰的控制点上作为参考站,另外两台架设在空旷、受多路径影响小且相距很近的位置作为流动站。三台接收机均具备接收 GPS、GLONASS、Galileo、BDS、QZSS多星座数据功能,流动站中一台采用常规RTK电台模式,另一台采用千寻知寸Find cm服务模式,卫星截止高度角均设置为15°,PDOP限值为6[13-14]。在手簿中进行千寻位置账户、IP地址等配置,挂载点(Mount Point)选择RTCM32_GGB,以便能够同时接收GPS、GLONASS和BDS三星双频数据。对接收机进行预热和静置并进行10 min的数据预采集后,使接收机按20 s的时间间隔自动进行RTK测量,共进行了3.1 h的数据采集,在数据采集过程中,网络状况良好,千寻位置测量未出现中断等情况。以各流动站坐标的平均值作为理论值,X、Y、H坐标误差如图1所示,水平精度与垂直精度如图2所示,PDOP值与可见卫星数目如图3所示,表1与表2分别是定位数据与可见卫星比较。
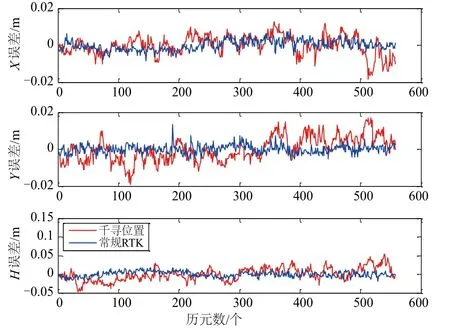
图1 理想观测条件下坐标误差
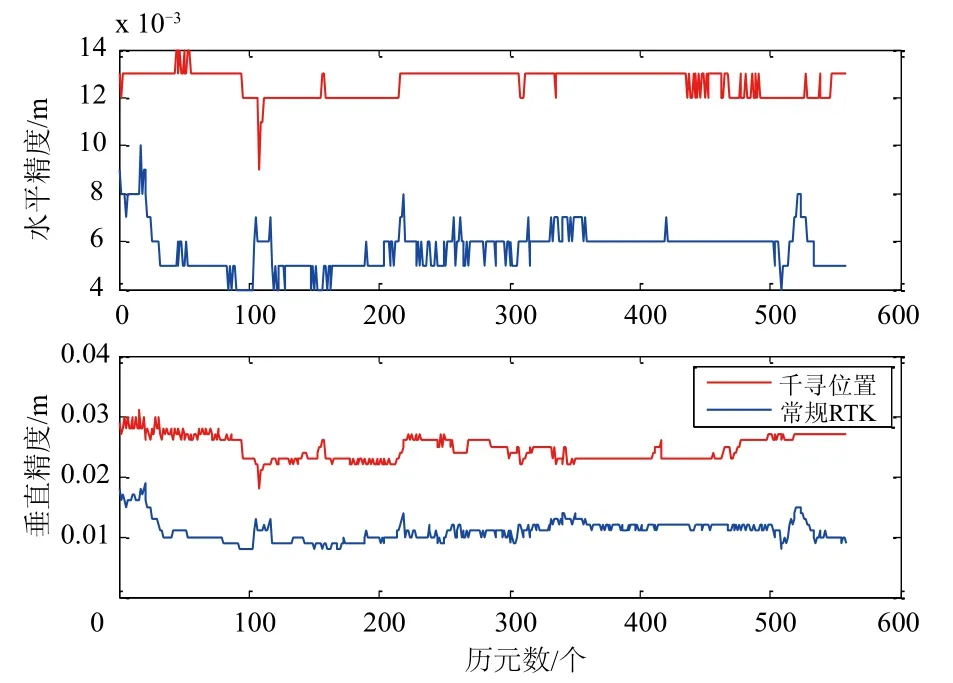
图2 理想观测条件下水平精度与垂直精度
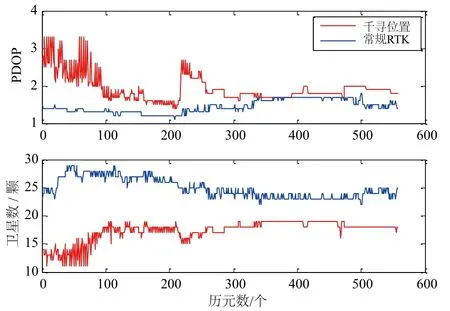
图3 理想观测条件下PDOP值与可见卫星数目

表1 理想观测条件下千寻位置与常规RTK定位数据比较
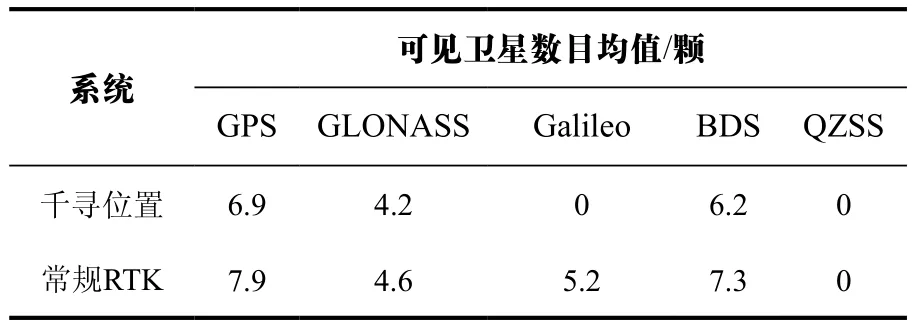
表2 理想观测条件下千寻位置与常规RTK可见卫星比较
从图1、图2、图3及表1分析可以得出,在理想观测条件下,千寻位置的内符合精度较常规RTK差,在水平精度与垂直精度上,常规RTK的最弱精度与千寻位置的最优精度相当。从表1与表2可以得出,千寻位置的可见卫星数目平均值较常规RTK少7.7颗,GPS、GLONASS、BDS三个星座的可见卫星数目相差较小,由于千寻位置未能接收Galileo卫星数据,其平均值则少5.2颗。可见卫星数目少使千寻位置测量结果的PDOP值更大,定位精度较常规RTK弱。
2 不良观测条件下分析
为了分析在卫星信号受到遮挡等不良观测条件下千寻位置的测量精度与性能,采用相同的参考站,两个流动站架设在卫星信号受到一定程度遮挡的建筑物附近,紧靠在一起但互不影响。卫星截止高度角为15°,PDOP限值为6,采用手簿中的“自动限差”功能,在完成初始化后,当固定解满足测量精度要求时存储数据,本文称之为“限差内固定解”。记录初始化时间、获得限差内固定解时间等,如果限差内固定解等待时间超过20 min则不予记录并重新开始下一次试验。进行了4.75 h共150次千寻位置与常规RTK的对比试验,每次试验均采用“清除卫星跟踪”操作,保证所采集的各项数据准确可靠。对数据进行分析,发现在常规RTK测量结果中出现一次假固定情况,如表3所示。

表3 不良观测条件下假固定数据情况
从表3数据可得,在RTK测量中,当水平精度与垂直精度均较优时,测量结果中仍可能存在假固定情况,导致平面和高程方向分别出现2.75 m、4.28 m的粗差。根据《全球定位系统实时动态测量(RTK)技术规范》,截止高度角在15°以上的卫星数目为5颗时,当PDOP值介于4~6之间,测量成果可用。因此,在树木高大的山区、建筑物密集区等不良观测环境中,当可见卫星被严重遮挡时,即便观测条件满足规范要求,也应对测量结果加强检核。
将假固定数据与限差内固定解等待时间超过20 min未存储坐标的数据剔除后进行分析,X、Y、H的坐标误差如图4所示,水平精度与垂直精度如图5所示,PDOP值与可见卫星数目如图6所示,表4、表5分别是定位数据与可见卫星比较。
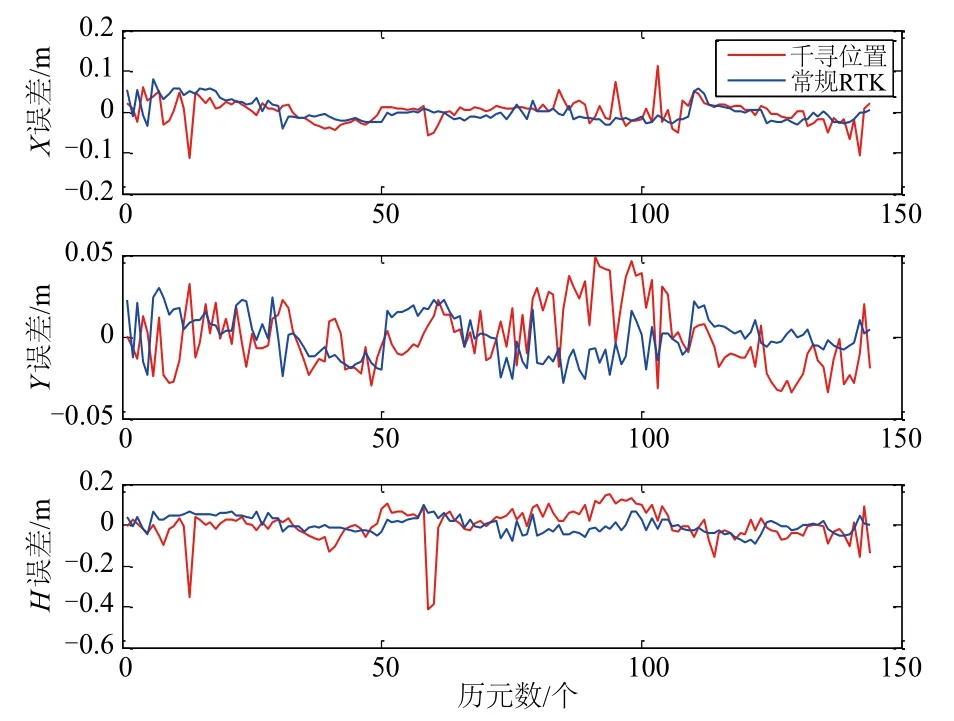
图4 不良观测条件下坐标误差
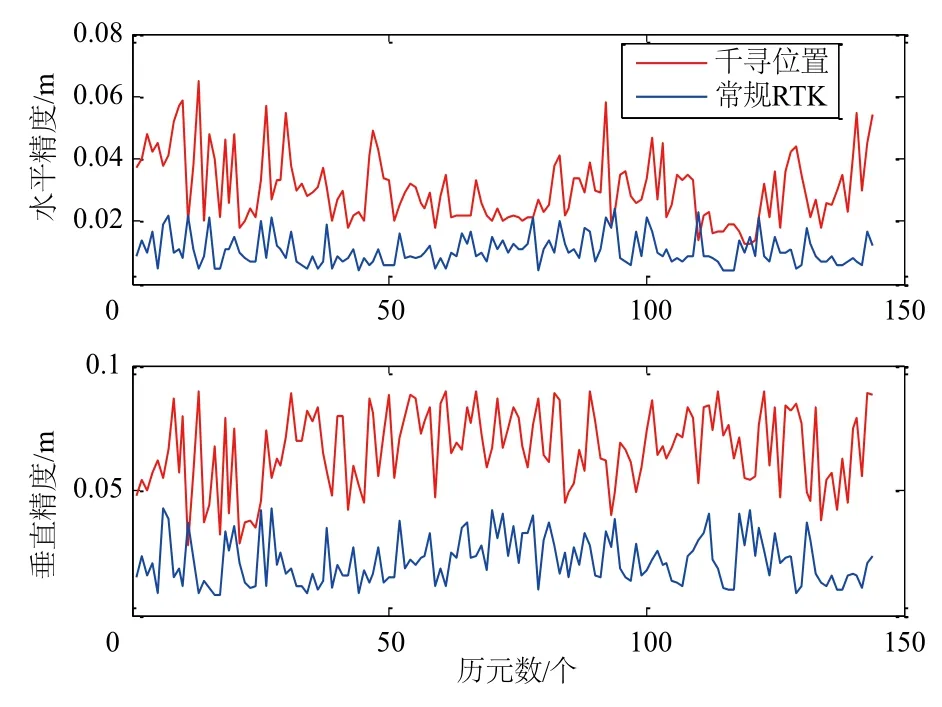
图5 不良观测条件下水平精度与垂直精度
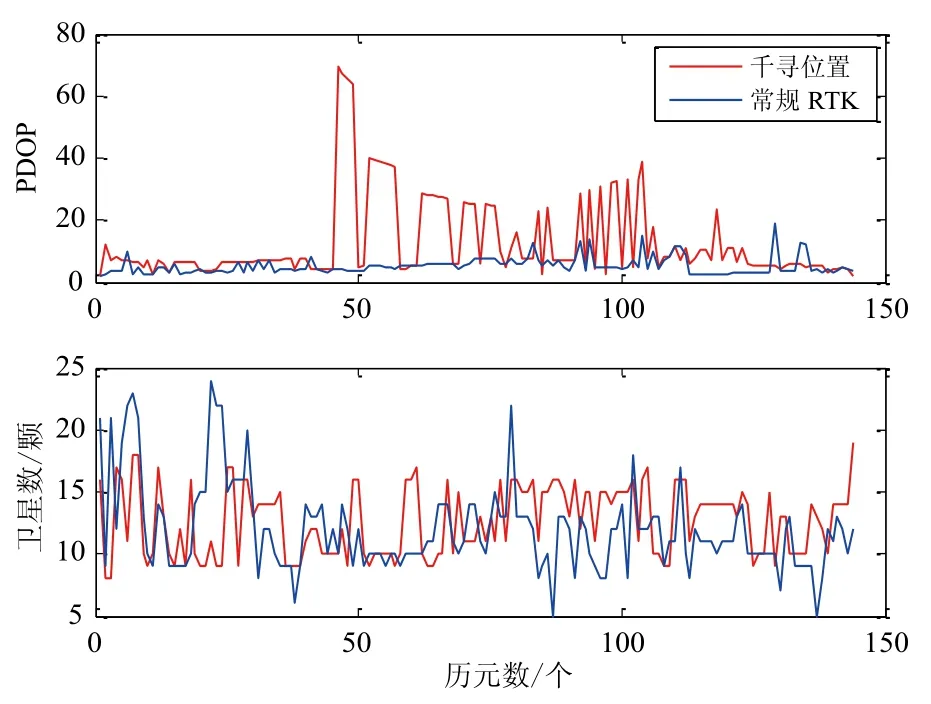
图6 不良观测条件下PDOP值与可见卫星数目

表4 不良观测条件下千寻位置与常规RTK定位数据比较
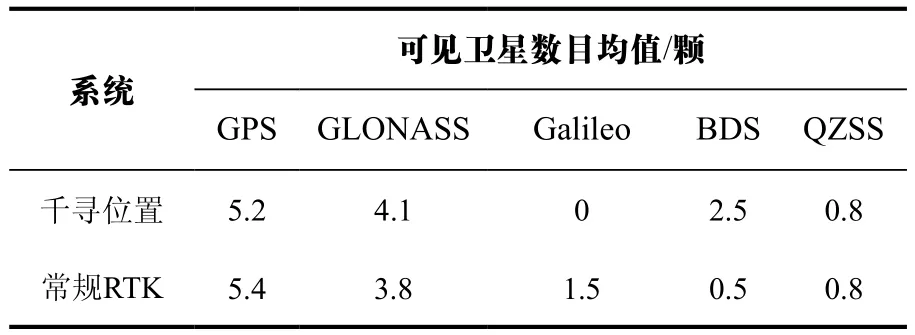
表5 不良观测条件下千寻位置与常规RTK可见卫星比较
从图4、图5、图6及表4分析可得,在不良观测条件下,千寻位置的内符合精度同样较常规RTK差,在高程方向上的差距较为明显。在不良观测条件下,常规RTK的水平精度与垂直精度相对于千寻位置的优势更明显,且稳定性更好。
从图6与表4可以发现,千寻位置的平均可见卫星数目较常规RTK多,这是由于千寻位置的初始化与获得限差内固定解的时间更长,在限差内固定解获得时捕获到了更多的可见卫星,同时也可发现其卫星空间几何分布并没有因为可见卫星数目增多而得到明显的改善,导致PDOP值出现图6中的跳变。根据《全球定位系统实时动态测量(RTK)技术规范》,进行RTK测量时,可见卫星数目不应少于5颗,PDOP值不应超过6。按规范对测量结果中不符合观测窗口状态要求的数据进行统计,千寻位置与常规RTK的有效数据占比分别为36.6%、76.0%,可见常规RTK的测量成果具有更高的可利用率。
从表4与表5可以看出,两种测量方法所观测到的GPS与GLONASS卫星数目相当。对于BDS卫星,在常规RTK与千寻位置测量结果中均出现较多未被捕获到的情况,其比例分别为90%、41%,导致可见卫星平均数目分别只有0.5颗与2.5颗。与常规RTK相比,千寻位置由于未能接收Galileo卫星数据,其可见卫星平均数目少1.5颗。
为进一步讨论两种测量方法的初始化与获得限差内固定解的时间情况,将统计的时间数据进行分析,如图7和表6所示,图7中未列出限差内固定解等待时间超过20 min所对应的数据。

表6 初始化与获得限差内固定解时间
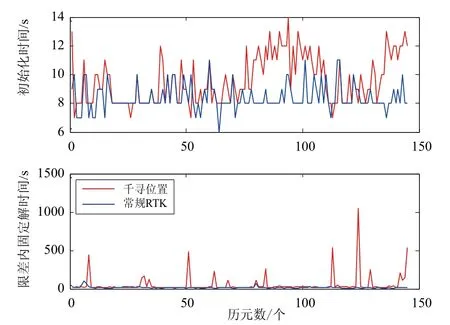
图7 初始化与获得限差内固定解时间
从图7及表6可得,千寻位置的初始化时间最长达37 s,初始化时间平均值较常规RTK长1.4 s,千寻位置与常规RTK获得限差内固定解的最大时间分别为1046 s、210 s。对千寻位置与常规RTK获得限差内固定解的时间进行统计,超过1 min的占比分别为10.7%和2.7%,超过2 min的占比分别为8.7%和0.7%,超过20 min仍不能获得限差内固定解的情况千寻位置占比3.3%。获得限差内固定解的平均时间千寻位置增加35.3 s,是常规RTK的3.2倍,因此,在不良观测环境中,常规RTK具有更高的数据采集效率。
3 结论
本文对千寻位置与常规RTK两种测量方法的定位数据质量与精度、初始化与获得限差内固定解的时间进行比较分析,得出如下结论:
1)在理想观测条件下,千寻位置的内符合精度、水平精度与垂直精度较常规RTK差。由于千寻位置未能接收Galileo卫星数据,Galileo可见卫星数目均值较常规RTK少5.2颗,总的平均可见卫星数目少7.7颗;在不良观测条件下,Galileo可见卫星数目均值较常规RTK少1.5颗。可见卫星数目少、卫星空间几何分布不佳使千寻位置测量结果的PDOP值相对较大。
2)在可见卫星被遮挡的不良观测环境中,当观测条件满足规范要求时,RTK测量结果仍可能存在假固定情况,应采用重新初始化、多次重复观测等手段加强数据检核。
3)在不良观测条件下,千寻位置的内符合精度、水平精度与垂直精度较常规RTK差,且差距较理想观测条件中的明显。试验中,千寻位置与常规RTK在不良观测条件中的有效测量成果占比分别为36.6%、76.0%,常规RTK的测量成果具有更高的可利用率。
4)在不良观测条件下,千寻位置的初始化时间与常规RTK的差距较小,但获得限差内固定解的平均时间是常规RTK的3.2倍,且出现长时间内不能获得限差内固定解的情况,常规RTK的数据采集效率更高。