FY⁃3(05)星主动对月定标控制技术研究
2021-07-18王金华薄煜明高旭东尹海宁
王金华,薄煜明,高旭东,尹海宁
(1.南京理工大学 自动化学院,江苏 南京 210094;2.上海卫星工程研究所,上海 201109;3.上海航天控制技术研究所,上海 201109)
0 引言
气象卫星的遥感仪器性能通常会随着光学元件和电子元件的老化以及空间环境的变化而变化。工程经验表明,气象卫星的可见光、近红外通道探测器灵敏度每年都有一定程度的衰减。这意味着,对卫星遥感仪器进行在轨定标是非常必要的。目前,卫星在轨定标源主要采用星上黑体、太阳光等,但黑体自身温度的控制误差、太阳光漫反射板的衰减会对星上定标造成不利的影响。以地物为目标开展定标时,大气的确定性也会对在轨星上定标产生不利影响[1]。
除了传统的定标手段外,在工程实践中,月球作为一种在轨定标源也逐渐受到重视,主要是月球定标相对于其他定标手段有其独特的优势。首先,月球具有极稳定的反射比,辐照度年变化小于10−8,并且反射光谱是连续光滑的,能够较好地反映太阳光谱的结构;其次,月球光谱辐亮度值在大部分卫星遥感仪器的动态范围之内,不需要在光路中引入其他部件,可以简化定标流程;另外,从卫星运行的轨道来看,无论是常用的太阳同步轨道卫星还是地球静止轨道卫星,都有较多机会在轨进行月球观测,为不同卫星之间的定标提供了统一的标准[2-7,9-10,12]。
FY-3(05)星是风云三号系列卫星中首颗运行于晨昏轨道的太阳同步轨道卫星,针对主载荷——中分辨率光谱成像仪的应用需求,首次设计了卫星对月定标工作模式。中分辨率光谱成像仪在轨运行时,需要通过对月观测进行仪器定标。目前在轨卫星采用对地定向的姿态模式,月球每月进入中分辨率光谱成像仪视场一次,但由于月球矢量相对于卫星轨道系+Y轴转动,中分辨率光谱成像仪视场扫描月球圆盘的时间不足10 s,只能形成数帧有效图像。为了增加中分辨率光谱成像仪对月球的观测时长,本文提出了机动对月定标工作模式。在该模式下,卫星本体姿态保持近似惯性定向,使中分辨率光谱成像仪视场能够长时间观测到月球。确定机动对月定标的控制目标,使月球在中分辨率光谱成像仪扫描视场内停留超过30 min。
本文对FY-3(05)卫星机动对月定标工作模式的相关情况进行了说明,总结了轨道、数管、姿轨控、热控相关分系统的工作。姿轨控方案表明,机动对月定标模式能够增加中分对月球圆盘的观测时长。在机动对月定标过程中,平台及载荷各分系统能够适应外部环境变化。
1 对月定标方案
1.1 载荷视场分析
中分扫描视场的后视图(即从轨道系原点指向+X轴方向)如图1 所示。中分扫描视场是一个条带状视场,在跨轨迹方向很宽(正常模式对地视场为图中的34.9°~145.1°),但沿轨迹方向视场仅0.685°。在最初的方案中仅19°~22°的冷空定标视场可用于对月定标,目前的方案为中分可以调整扫描方案(更改扫描起始位置),使得12°~140°均可对月定标。由于对月定标时月球位于+Y侧,所以实际对月定标可用视场为12°~90°。

图1 中分扫描视场Fig.1 Median scanning field of view
图1 中,0°方向为轨道系的+Y方向,90°方向为轨道系的+Z方向(即对地方向)。FY-3(05)卫星是晨昏轨道卫星,太阳始终位于轨道系的−Y方向附近,即图1 中的180°附近。
1.2 对月定标方法
卫星正常在轨飞行一圈,卫星指向月球的矢量会绕卫星轨道系的+Y轴转动一圈,如图2 所示。图中可见,只有当月球矢量位于YOZ平面内时,月球才会位于中分视场中,由于月球矢量的转动,该过程只能持续一小段时间。

图2 对月定标指向角示意图Fig.2 Schematic diagram of the pointing angle of lunar calibration
为了能够让月球始终处于中分扫描视场之内,当月球矢量进入YOZ平面以后,可以让卫星本体按一个确定的角速度绕+Y轴转动,该角速度即月球矢量在轨道系中绕+Y轴转动的角速度。通过卫星本体的转动,保证了月球矢量始终位于YOZ平面以内。
1.3 指向角的定义
为了便于分析对月定标过程中的角度关系,下面定义了如图2 所示的两个指向角:1)α角为星月矢量与轨道系+Y轴夹角,用于辅助判断星月矢量是否满足中分扫描视场要求;2)β角为星月矢量在轨道系XOZ面的投影与+Z轴夹角,用于引导姿控作俯仰机动。
2 轨道计算方案
2.1 月球运动特点
月球轨道运动的平面称为白道面,将月球轨道面扩大和天球相交的大圆称为白道。为了描述月球的轨道运动,可以和人造地球卫星一样,用6 个轨道根数表示。不同的是月球的轨道根数应在以地心、黄道和春分点为基准的地心黄道坐标系中描述(描述人造地球卫星的轨道根数的坐标系一般是以地心、地球赤道和春分点为基准的地心赤道坐标系)。
月球的6 个轨道根数为:aL为半长轴;eL为偏心率为升交点黄经为轨道倾角为近地点黄经为历元时刻月球的平黄经。
上述前4 个根数与经典轨道根数的定义一样。近地点黄经为首先沿黄道从春分点量至升交点,然后再沿白道量至近地点的角度之和;月球的平黄经为首先沿黄道从春分点量至升交点,然后再沿白道量至月球的平位置的角度之和。
白道、黄道和地球赤道的相互关系如图3 所示。图中:r为春分点为白道相对于黄道的升交点;εS为黄道相对于地球赤道的夹角(即黄赤交角),
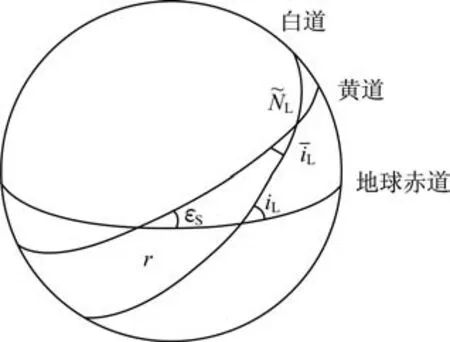
图3 白道、黄道和地球赤道的相互关系Fig.3 Interrelation among moon’s path,ecliptic,and earth equator
由图3 可知,由于交点西退引起白道与地球赤道的夹角iL发生变化。当升交点与春分点重合时,白道与地球赤道之间的夹角达到最大值:23°27′+5°09′=28°36′。当降交点与春分点重合时,白道面与地球赤道面之间的夹角达到最小值23°27′−5°09′=18°18′。因此,白道面与地球赤道面间的夹角在18°18′~28°36′之间变化,变化周期是18.6 a。
朔望月是以太阳位置为基准的周期。月球与太阳的相对位置不同而使月球的月相不同。月相为观测者所看到的月球的相貌,如朔、望、上弦、下弦。阴历初一为新月,称为朔,十五或十六为满月,称为望,在朔望之间为弦,如图4 所示。

图4 月相的成因Fig.4 Reasons for the formation of moon phases
朔望月是月相连续两次相同所经过的时间,例如从新月到新月的周期或从满月到满月的周期。朔望月的平均长度为29.530 6 个太阳日,我国传统的农历以朔望月作为月的单位。
2.2 月球矢量插值计算方法及精度分析
对月定标过程中需要计算月球位置矢量,常用的计算方法有解析法和插值法两种。解析法的优势在于能够递推得到任意时刻的月球位置,但指向精度只能保证到0.1°左右;插值法的优势在于能够提供高精度的月球位置,指向精度可以保证到0.001°,但有效的时间范围只能保证1~2 d,不能递推[8,11]。
考虑到卫星对月定标的实际工作需求,采用插值法更为适合。一是因为对月定标的控制方案是一种开环控制(姿轨控分系统没有月球敏感器,月球在中分辨率光谱成像仪视场中的实际位置不会反馈到姿轨控分系统),总的指向误差余量只有0.092 5°,所以首先要求月球矢量计算尽可能不要引入误差,把误差余量留给姿轨控分系统;二是对月定标频次较少(一年若干次),没有必要时刻计算月球矢量,插值法仅需要在对月定标前上注12 个系数以及插值起始历元即可。
2.2.1 插值算法
利用三次多项式计算月球在J2000 地心坐标系下的坐标:

式中:px1,px2,…,pz4为12 个插值系数;t为相对于插值历元点的分钟数(假设历元时间为2019-04-26T00:00:00.000,需要计算的时间点为2019-04-26T00:01:30.000,则相对于历元点的分钟数为1.5,即式中t用1.5 代入);t为星上数管软件的计时时间,同真实时间之间存在20 ms 左右的偏差,在后文指向精度分析中考虑了该误差。
当明确了中分对月定标的日期后,卫星总体方根据该日期,利用STK 中的JPL/DE 星历仿真出月球矢量在1 d 内的J2000 位置坐标(共1 441 个数据点);然后利用Maltab 中的曲线拟合工具cftool,采用三次多项式分别对x、y、z进行拟合,拟合系数使用双精度浮点数,有效位数保证在15 位左右。拟合系数共12 个,每一个坐标4 个系数,即前文中的px1,px2,…,pz4,该系数在实施中分别对月定标前上注到数管计算机,同时还需要将拟合区间的初始时间t0上注到数管计算机,初始时间t0的格式符合数管现有计时格式(即相对J2000 的日计数和日内毫秒计数)。
数管软件需设置一个标志位,当该标志位有效时,启动月球矢量的插值计算,否则还是使用之前的解析公式计算月球矢量。
2.2.2 插值精度
利用STK 中的DE 星历计算了月球在1 d 之中的位置矢量,然后针对x、y、z坐标分别进行三次多项式拟合,比较了拟合结果和真实位置矢量之间的偏差。结果表明,x坐标最大偏差为0.3 km,y坐标最大偏差为0.3 km,z坐标最大偏差为0.14 km。其中,0.3 km 对应的角度误差约为0.000 045°,能够满足高精度月球矢量的计算需求。
实际操作时,拟合区间也可以取2 d,这样插值精度会略微降低,约为0.000 75°,但拟合系数的有效范围可以延长1 d。
3 姿态控制方案
3.1 卫星姿态控制方案
卫星姿轨控分系统主要由测量部件、控制部件和执行部件组成。其中,姿态测量部件包括星敏感器、红外地平仪、陀螺、磁强计和太阳敏感器等;控制器为双CPU 的姿轨控计算机;执行机构包括偏置动量轮、反作用飞轮、磁力矩器和推力器等[13-16]。
该低轨气象卫星采用三轴稳定偏置动量控制方式。为实现高可靠高精度姿态控制,系统稳态运行阶段采用“双星敏感器+地平仪+飞轮”组合的三轴闭环控制方案,采用“陀螺组合+星敏感器+飞轮”实现俯仰机动360°完成对月定标观测控制任务[14]。
为保证系统可靠性,采用如图5 所示的飞轮配置及安装方式,包含2 台68 N·ms 偏置动量轮,1 台6 N·ms、2 台25 N·ms 反作用飞轮以及1台68 N·ms 角动量补偿轮。2 台68 N·ms 偏置动量轮A、B 安装在俯仰轴上,反作用飞轮D、E 分别正交安装于偏航轴和滚动轴上,C 为备份反作用飞轮,其安装轴与滚动轴正方向、偏航轴负方向夹角均为45°且在OXZ平面内,1 台68 N·ms 补偿轮安装在偏航轴上。
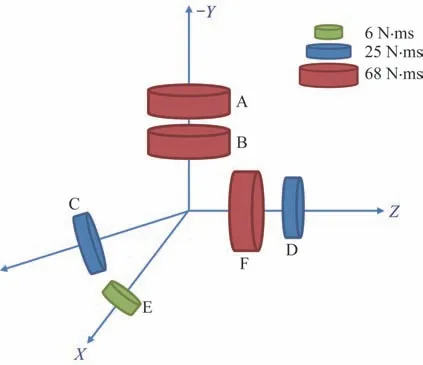
图5 飞轮配置示意图Fig.5 Schematic diagram of flywheel configuration
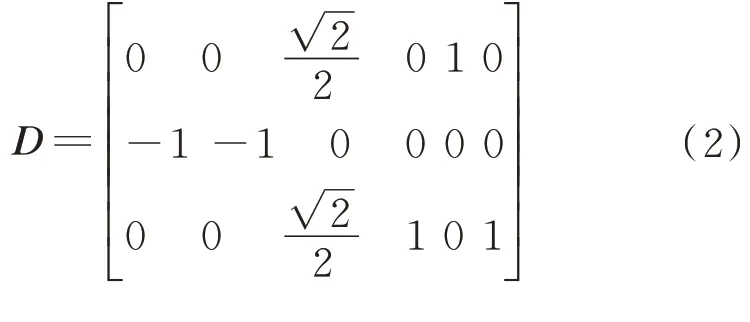
各飞轮在本体系下飞轮的安装矩阵为
3.2 跟踪控制器设计
对月定标采用跟踪给定姿态角的方式进行跟踪控制,给定姿态角为月球矢量在本轨道系XOZ面内的投影与轨道系+Z轴的夹角β,由数管计算,作为控制器的输入参数。当月球矢量在卫星本体坐标系+X方向半平面时,β定义为正;当月球矢量在卫星本体坐标系−X方向半平面时,β定义为负。卫星绕俯仰轴转动对β进行跟踪实现对月定标。所设计的控制律由误差姿态动力学模型得到。由于跟踪过程的起始阶段是一个长时间的动态过程,积分项I会带来较大滞后,造成积分饱和影响系统稳定性,所以在整个对月定标期间不接入积分控制。具体的控制算法如下:
无陀螺角速度信息为

式中:Kpx、Kpy、Kpz为XYZ轴比例控制系统;Kdx、Kdy、Kdz为XYZ轴微分控制系统;Tmgx、Tmgy、Tmgz为XYZ轴的磁卸载前馈力矩;Tdx、Tdy、Tdz为XYZ轴的干扰力矩前馈;令qe=[qe0qe1qe2qe3]T为误差四元数,可表示为参考姿态四元数qoc(对月跟踪的目标姿态,参考系相对于轨道系)和当前姿态四元数qob的四元数差。
qoc通过β计算得到,公式为

qob为卫星本体系相对于轨道系的姿态四元数,由星敏测量姿态经过姿态结算给出。
qe计算公式为
3.3 陀螺积分器设计
卫星绕俯仰轴转过一定角度后,受地球和星敏安装角度的影响,会出现3 台星敏全部失效的情况(持续约20~30 min),此时需要以最后一次有效的星敏数据作为姿态积分初值,通过光纤陀螺给出的角速度信息进行四元数积分得到当前卫星姿态。
四元数运动学方程可写为

通过k时刻的姿态四元数和陀螺角速度可以得到k+1 时刻的四元数,采用四阶Runge-Kutta 法的高精度积分公式为

式中:T为陀螺积分的步长。
4 半物理仿真
仿真输入条件如下:
仿真初值:三轴姿态角为0.15o,角速度为零。
仿真总时长:10 000 s。
仿真工况:1)t=0 s 时刻,模拟在轨正常稳态运行,三轴姿态角由星敏感器测量解算得出;2)t=500 s 时刻,月球矢量进入YOZ面内,开始执行对月观测任务,控制器切换至跟踪控制律;3)t=6 620 s时刻,对月观测任务结束,恢复在轨星敏+飞轮的长期稳态对地定向控制。控制律中不含陀螺角速度,结果如图6~图11 所示。

图6 参考姿态Fig.6 Reference attitude

图7 卫星姿态1Fig.7 Satellite attitude 1

图8 卫星角速度1Fig.8 Satellite angular velocity 1
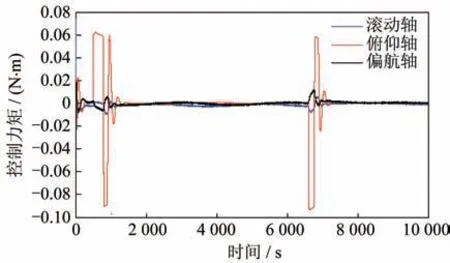
图9 控制力矩1Fig.9 Control torque 1

图10 跟踪误差1Fig.10 Tracking error 1

图11 飞轮角动量1Fig.11 Flywheel angular momentum 1
控制律中含陀螺角速度,结果如图12~图16所示。

图12 卫星姿态2Fig.12 Satellite attitude 2
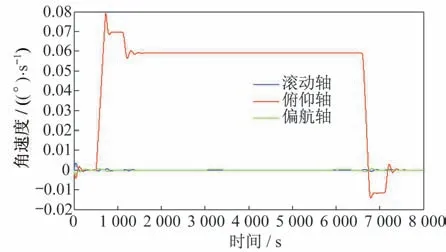
图13 卫星角速度2Fig.13 Satellite angular velocity 2
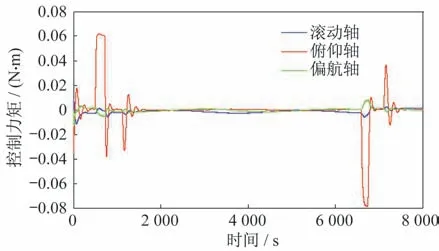
图14 控制力矩2Fig.14 Control torque 2

图15 跟踪误差2Fig.15 Tracking error 2

图16 飞轮角动量2Fig.16 Flywheel angular momentum 2
从数值仿真结果得出以下结论:
1)由于稳态和跟踪控制律在控制误差较小的情况下基本相同,该控制方案可以实现进入和退出对月观测模式时姿态平稳过渡,且任务过程中除了过渡部分外姿态控制精度可到达稳态控制精度的要求,即小于0.15°。
2)使用一个偏置动量轮进行控制也可实现对月观测,但由于单个动量轮仅能提供最大0.075 N·m的力矩,稳态到对月以及对月到稳态的过渡过程较长,且过渡部分姿态误差较大。
3)轨道周期101 min,对月定标前到对月观测的过渡时间为1 000 s,每轨实际用于对月定标的时间达83 min,满足大于30 min 的需求。
4)有陀螺角速度信息的控制结果与无陀螺速度相比,角速度的超调更小,更有利于防止系统积分饱和导致控制发散。
5 结束语
机动对月定标模式是FY-3(05)卫星首次引入的新工作模式,从载荷定标的角度,该模式能够增加中分对月球的观测时间,有利于提高定标数据的测量精度。但该工作模式对整星其他各分系统的状态影响较大,会影响卫星的业务运行,建议尽量采用每月一次的非机动对月定标,机动对月定标的实施频次不宜过多,确有需要时,可1~2 a 开展一次。