单滑块与飞轮协同姿态控制卫星运动分析
2021-07-18钱首元高长生荆武兴
钱首元,高长生,荆武兴
(哈尔滨工业大学航天学院,黑龙江哈尔滨 150001)
0 引言
从20 世纪70 年代以来,应用卫星技术迅速发展,对姿态控制系统的精度也越来越高,特别要求姿态控制系统的高精度长寿命和快速性。传统卫星通常采用以飞轮为主的三轴姿态控制系统控制星体姿态。
传统卫星的飞轮控制不需要消耗工质,只需要消耗电能,在卫星上太阳能电池阵的不断补充下,不会像推力器那样能源枯竭,适用于长时间工作。并且飞轮的精度要比喷气控制高出一个数量级,适合于克服高轨卫星受到的周期性扰动,不会对光学仪器造成污染。但是由于飞轮存在饱和、控制力矩比较小等特点,无法实现快速的姿态机动[1]。传统的变质心控制技术是通过调整飞行器内部活动体与载体的相对位置,使得系统质心发生变化,改变气动力臂,从而打破原有的力矩平衡,实现对飞行器姿态的控制。变质心控制技术的优点是执行机构位于飞行器内部[2-3]。在地球中高轨道上,卫星受到气动力和气动力矩极小,变质心机构通过滑块的滑动所产生的对载体的反作用力和反作用力矩改变星体的姿态,因而有着很快的响应速度。目前,陆正亮等[4-7]研究了低轨卫星利用受到的气动力及气动力矩配平攻角的变质心控制问题。埃及曼苏拉大学数学系的GOHAR 等[8-11]着重研究了三轴稳定卫星的变质心姿态控制,并用李亚普诺夫方法证明了这种动力学模型的渐近稳定性。但是由于滑块移动距离精度有限以及卫星本体惯性张量测定精度限制,变质心机构也存在控制精度低等缺点[12]。
上述文献中还没有针对滑块与飞轮的协同控制卫星姿态的研究。本文在中高轨道卫星需要大角度快速机动的情况下,采用飞轮控制机构与变质心滑块控制机构协同控制的方法,首先针对包含单滑块与3 个飞轮在内的7 自由度卫星建立了完整的刚体动力学方程,并分析了其运动特性和动力学系统的特点;其次根据姿态指令机动角度采用最小二乘法,反向求解出滑块需要运动的距离,滑块执行机构跟踪星载计算机里预先规划存储好的正弦运动方式运动到指定位置,这为控制器根据姿态机动指令计算出滑块需求运动距离提供了一种工程上可行的方法;最后飞轮执行机构开始工作,使得卫星高精度地对指定角度定向。
这种联合控制的方法,结合了卫星在变质心控制大角度机动下的快速响应与飞轮控制高精度定向等优点,能够很好地完成中高轨卫星的快速响应机动的任务。
最后对比变质心机构与飞轮的协同控制的效果与单独采用飞轮控制的效果,突出了两者协同控制的优越性。仿真结果表明,单滑块变质心卫星在卫星姿态机动过程中能快速响应。这也为单滑块变质心卫星设想提供了一些理论参考。
1 动力学模型
1.1 系统动力学模型
单滑块模式构型的飞行器由正方体形状的卫星本体和位于星体内部的滑块组成,滑块位于系统质心正前方,由电机驱动,沿平行于削平面且垂直于本体中心线方向的滑轨内做平移运动,不可旋转。滑块相对本体的运动通过反作用力使得本体姿态发生变化。
本文的研究对象如图1 所示,s、b、p 分别为系统、本体、滑块的质心。滑块的质量、体积以及每个轴的转动惯量与本体相比都较小,约为本体的1/10以下。
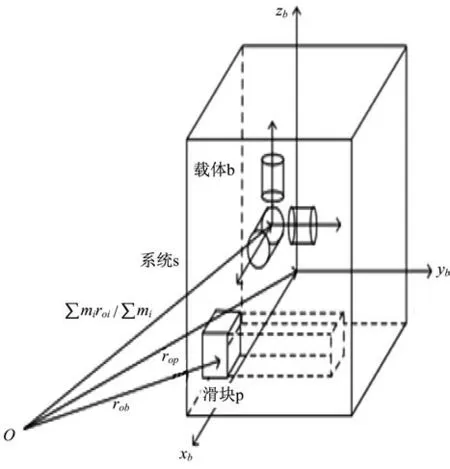
图1 单滑块变质心卫星示意图Fig.1 Schematic diagram of single slider metamorphic core satellite
假设卫星在中高轨道运行,主要受重力梯度力矩等干扰力矩影响,故可以忽略气动力和气动力矩的影响,只考虑外部的重力梯度力矩干扰。
定义惯性坐标系(OXYZ)、系统固连坐标系(osxsyszs)和载体固连坐标系(obxbybzb),如图1 所示。其中,系统固连坐标系的原点位于瞬时系统质心,且跟随本体旋转[11]。
定义变量符号,m为质量,I为惯性张量,下标s、b、p 分别为系统、载体和滑块,rbp为从点b到点p的相对位置矢量,νb为载体相对于惯性坐标系的速度,ω为载体固连坐标系相对于惯性坐标系的旋转角速度,g为重力。
在以系统质心为原点的载体坐标系非惯性s系中表示为

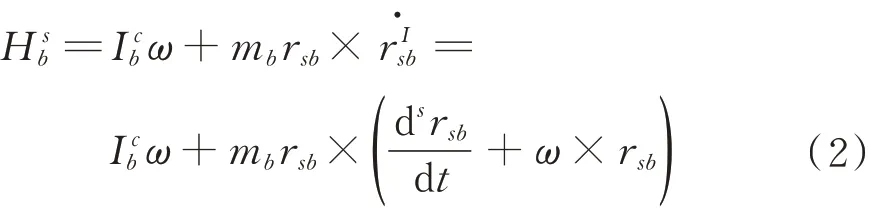
而对于卫星载体,根据相对微分法则,其角动量在非惯性s系中表示为
对于第i个飞轮,其角动量在非惯性s系中表示为

对于变质心滑块,其角动量在本体系s系下表示为

对卫星系统整体相对于系统质心s点列力矩平衡方程,并表示在本体系s系下有

因此,根据各矢量间关系以及载体系与惯性系间的相对微分法则,载体坐标系下姿态动力学方程为
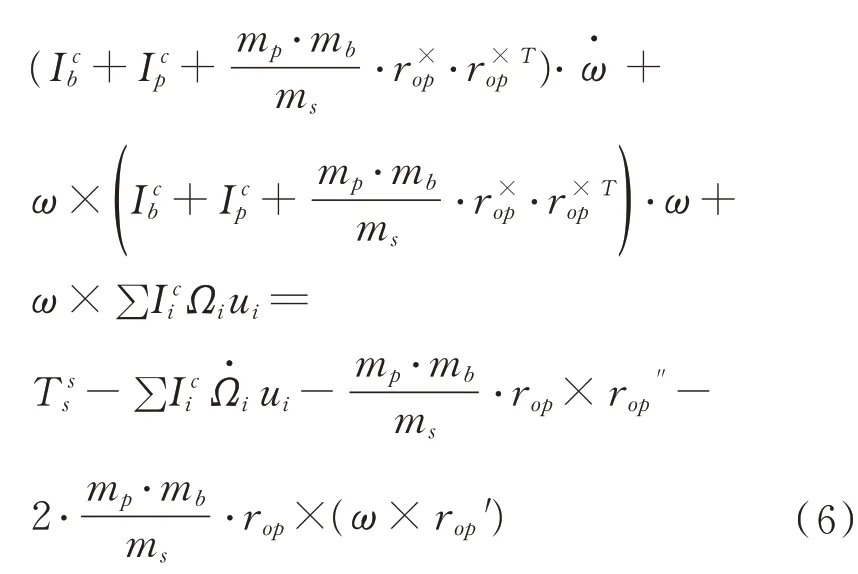
式中:(⋅)×、(⋅)′、(⋅)″分别为矢量在载体坐标系的叉乘矩阵、矢量在载体坐标系下对时间的一阶、二阶导数。
由载体动力学方程可以看出单滑块变质心卫星具有以下特点:与传统飞轮控制的卫星相比,飞行器载体还受到滑块偏移产生的耦合作用力项,这些项将对载体姿态运动产生一定影响。因此,该系统是一个典型的非线性、强耦合的快时变复杂系统。
为了便于动力学分析,根据产生原因将方程右边的附加力和附加力矩分成以下几项:
以上各项为单滑块变质心飞行器受到的特有的力和力矩,因此系统姿态动力学方程可以表示为

1.2 滑块动力学模型
为了便于对直接作用在滑块上的执行机构控制力大小进行分析,此处建立滑块动力学方程。
由于滑块相对载体只存在沿着滑轨的平移运动,而滑块的质量和体积相对载体来说较小,因此可将滑块看作质点,只用建立其质心平动动力学模型:

式中:Rop为载体滑轨约束对滑块的作用力;Fc为载体施加的对滑块的控制力;Gp为滑块重力。

将式(9)在载体坐标系下代入式(8)可以得到
由于卫星处于整体失重状态,忽略滑块重力,即可得到载体坐标系下滑块动力学方程的矢量形式:
式中:方程右边的后三项即为载体姿态运动与滑块运动的耦合作用对滑块运动的影响项。
1.3 滑块需求运动距离
当卫星收到姿态机动指令,星载计算机会把姿态角指令转化为变质心滑块执行机构的滑块运动距离指令,进而滑块通过跟踪计算机生成的正弦运动规律达到控制卫星姿态的效果。
本文采用最小二乘迭代方法把姿态角指令转化为滑块的运动距离指令,选取滑块运动距离ξ为一维状态量,建立如下残差方程:

状态量ξ的猜测误差决定了残差的大小,假设通过测量获得N个采样时刻的残差gi(ξ),然后建立如下最小二乘指标:

依据最小二乘原理的极值条件,可以得到如下迭代估计算法:
当前估计值与上一步的差的范数满足一定精度时就停止迭代。一般经过10~20 次的迭代即可停止,则当前的估计值ξ*即为得到的精确结果。
2 飞轮与滑块的控制律设计
2.1 飞轮控制律设计
当卫星的飞轮执行机构来控制卫星姿态的时候,利用分配矩阵与安装矩阵实现控制力矩的分配,设计带有补偿的PD 控制率在本体系下的表示为
式中:H为整星系统惯性张量,即瞬时的;M为力矩合;Csw为轨道系到本体质心系的坐标转换矩阵。

离心惯性力矩为

飞轮系离心惯性力矩为

滑块运动产生的附加相对惯性力矩为

滑块运动产生的附加哥氏惯性力矩为

根据1.1 节系统动力学方程,把飞轮对应的控制率代入式(7),可以约去补偿的耦合力矩[13-16],得到
把各惯性力耦合项消掉后,减弱了仅有飞轮控制时姿态三通道的耦合效应,使得加入耦合补偿控制后的方程更简洁且更接近于对惯性环节的控制。
2.2 滑块控制律设计
在1.3 节已经利用最小二乘迭代法设计好了滑块的运动距离,滑块的控制器只需把设计好的运动距离作为标称值输入来跟踪上。假设滑块采用最简单的PD 控制率:

由于相对于小质量的滑块,执行机构的控制力很大,只要合理地设计控制参数,就可以使得滑块精确地跟踪设计好的位置时间曲线。在滑块滑行末端,还会有锁死机构将滑块锁死,所以不存在最后的振荡。
3 仿真校验
本文仿真中,为简化问题,突出现象,只考虑绕主轴Z轴转动,其他方向的转动可以转换为多次绕主轴的转动组合得到。
为使得滑块的滑动对其他轴的姿态影响最小,本文仿真中假设滑轨设计在z=0 平面上。这样滑块滑动仅改变Z轴姿态,对其他两轴没有影响。滑块的质量、体积以及转动惯量与本体相比较小,设计为本体的1/10 左右,且只考虑外部的重力梯度力矩干扰。
3.1 仅飞轮控制卫星姿态
当卫星只采用飞轮控制姿态,卫星姿态机动指令为绕着Z轴转过−5°时,仿真结果如图2 所示。根据图中仿真结果可知,由于飞轮的作用力矩比较小,并且存在饱和的现象,所以在飞轮的作用下,卫星姿态机动−5°需要130 s 的时间,卫星的响应时间远长于变质心控制。
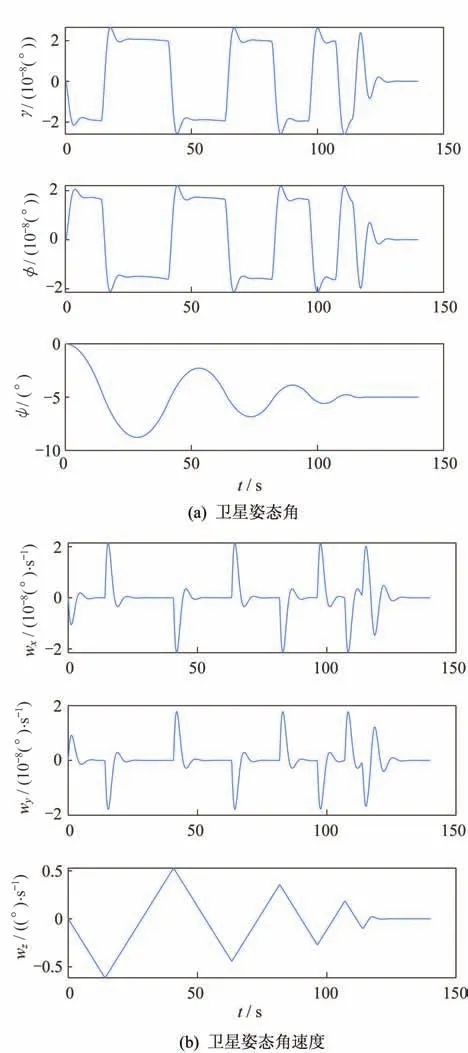
图2 仅飞轮控制时卫星状态量变化图Fig.2 Variations of satellite state variables under flywheel control only
3.2 滑块与飞轮协同控制卫星姿态
当采用文中叙述的协同控制时,首先要用最小二乘法反解求得卫星姿态绕着Z轴转过−5°时,滑块需要的运动距离;然后滑块执行机构跟踪星载计算机里预先规划存储好的正弦运动方式运动到指定位置,飞轮执行机构开始工作,使得卫星高精度地对指定角度定向、仿真结果如图3 和图4 所示。
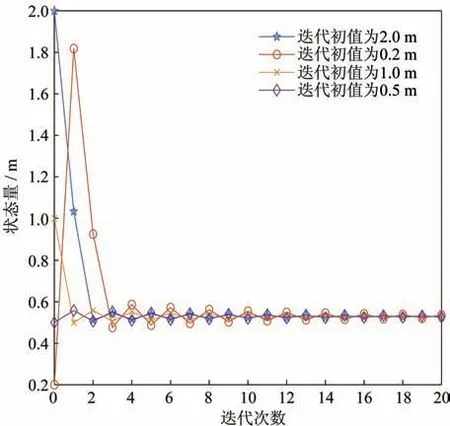
图3 滑块状态量最小二乘迭代变化图Fig.3 Variations of slider state variables under least squares iterations
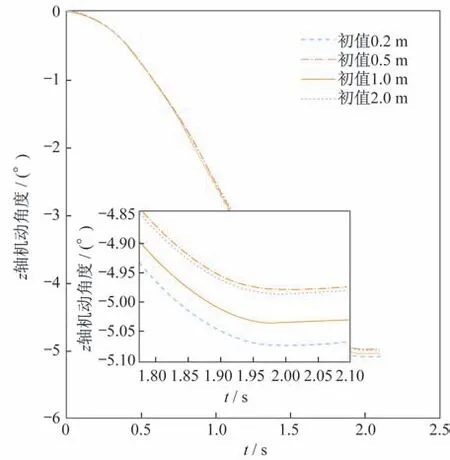
图4 滑块状态的迭代结果引起的卫星姿态角变化图Fig.4 Variations of satellite attitude angle due to slider state iterations
代入不同初值,迭代收敛的效果并不一样。在迭代初值更接近真值的时候,迭代收敛效果最好,最终卫星转过的角度更接近于绕着Z轴转−5°。
根据图中结果,选代效果最好的初值,求得为使卫星姿态绕着Z轴转−5°,滑块需求的运动为正向运行0.526 2 m。滑块据此以正弦规律运行到需求位置,得出的卫星在变质心滑块与飞轮姿态联合控制的作用下,仿真结果如图5 所示。
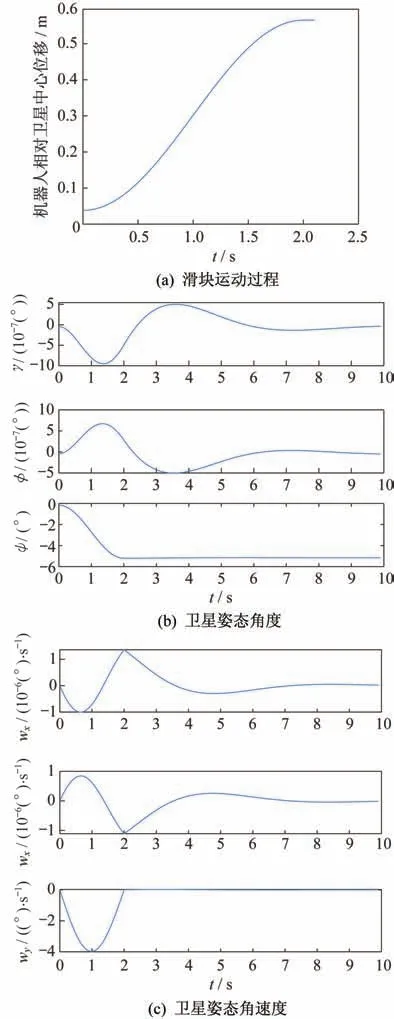
图5 仅滑块控制时卫星状态量变化图Fig.5 Variations of satellite state variables under slider control only
从仿真结果可以看出,前2 s 滑块作用,卫星能快速机动到达期望角度附近。但是由于滑块位移精度以及飞轮角动量的存在,使得绕着Z轴的转动同时对其他两轴也存在扰动,卫星三轴间存在姿态耦合,所以变质心的控制精度并不高。从2 s 到8 s,飞轮作用,卫星高精度姿态定向,并且整个机动过程仅用时8 s,要远优于仅用飞轮单独作用的130 s。
3.3 一种圆弧滑轨型单滑块控制机构的可行性
由于卫星空间有限,无法实现长距离滑块滑动,可以考虑把沿着直线滑动的滑块改成沿着圆弧轨道滑动,设计为如图6 所示的结构。当采用新型结构时,卫星能快速机动更大的角度。
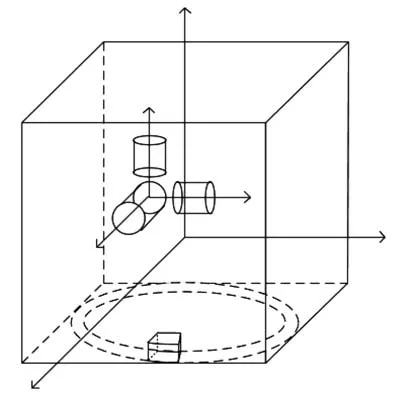
图6 圆弧滑轨型单滑块变质心卫星示意图Fig.6 Schematic diagram of circular orbit type single slider metamorphic center satellite
当采用单滑块变质心与飞轮联合控制时,卫星机动指令为绕Z轴转过−22°,得到的仿真结果如图7 所示。从仿真结果可知:前16 s 滑块运动,卫星快速绕着Z轴转动到−22°附近;随后在16~25 s,飞轮作用使得卫星姿态高精度定向。卫星最终稳定高精度定向时仅用时25 s。
而同样的卫星姿态机动指令为绕着Z轴转过−22°时,只采用飞轮控制卫星姿态,得到结果如图8 所示。从仿真结果中可以看出,仅采用飞轮控制时,卫星要460 s 才能稳定到Z轴的−22°,所用时间比较长,消耗能量较多。
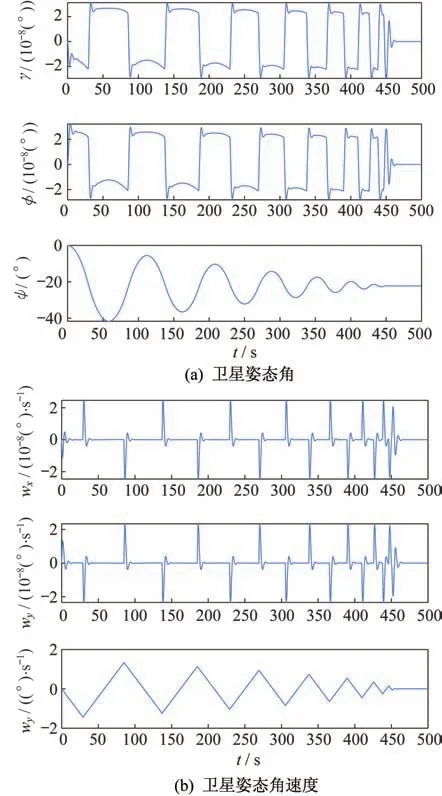
图8 仅飞轮控制时卫星状态量变化图Fig.8 Variations of satellite state variables under flywheel control only
仿真结果再次验证了当用单滑块变质心与飞轮联合控制仅用25 s 实现姿态机动,而仅用飞轮控制则需要460 s,远远长于单滑块变质心与飞轮的联合控制。仿真结果同时验证了新构型的可行性,在没有降低变质心机动效率的前提下,极大地节省了卫星载体内部的空间和滑块质量与体积,使得这种联合控制方案的可行性进一步提升。
4 结束语
本文的仿真结果再一次验证了传统卫星的飞轮控制星体姿态。由于飞轮存在饱和、控制力矩比较小等特点,无法实现快速的姿态机动。变质心控制机构通过滑块的滑动所产生的对载体的反作用力和力矩来改变星体的姿态,有着很快的响应速度。本文采用飞轮与变质心滑块机构协同控制的方法,提出并验证了一种圆弧滑轨型单滑块控制机构的可行性。这种方法结合了变质心控制快速响应与飞轮控制高精度等优点,克服了变质心机构存在的控制精度差等缺点。