多功能叶腊石码垛执行器的开发
2021-06-18谭敢闯冯晓鹏刘方方张世欣
谭敢闯,冯晓鹏,刘方方,张世欣
(1.河南明华智能系统研究院有限公司,河南郑州 450000;2.河南省超硬材料智能制造装备集成重点实验室,河南郑州 451191)
0 引言
腊石用于金刚石合成过程,作为密封、保温和传压介质[1-3]。对叶腊石进行微波炉烘烤后,目前需要人工逐步地将叶腊石码垛,每行与每列都要整齐地摆放在托盘中。由于托盘外形较大,人工码垛费时费力,也不够整齐。码垛机器人是机械与计算机程序有机结合的产物,提高了生产效率,在码垛行业有着广泛应用[4-5]。码垛机器人大大节省了劳动力和空间。码垛机器人运作灵活精准、快速高效,稳定性和作业效率高。
机器人末端执行器是指任何一个连接在机器人边缘(关节)具有一定功能的工具[6]。要实现工业机器人对叶腊石的高效准确码垛,还需要开发专用的末端执行器。
1 末端执行器的结构
执行器包括三轴行架。三轴行架能够在三维方向上运动,三轴行架上连接有抓手。抓手包括抓手本体,本体上配合连接有压爪。压爪的相对侧面上设置有侧固定板,压爪与侧固定板之间的距离可调。抓手本体的前方设置有整形板,整形板由整形动力气缸驱动,待抓取物料由整形板整形后,被夹持在压爪与侧固定板之间,如图1 所示。三轴行架包括X 轴行架、Y 轴行架和Z 轴行架。Y 轴行架固定在框架结构上,X 轴行架垂直固定在两根平行的Y 轴行架上,Z 轴行架垂直固定在X 轴行架上。抓手固定连接在Z 轴行架上,X 轴行架与Y 轴行架之间、X 轴行架和Z 轴行架之间均通过滑轨滑块配合,如图2 所示。

图1 抓手
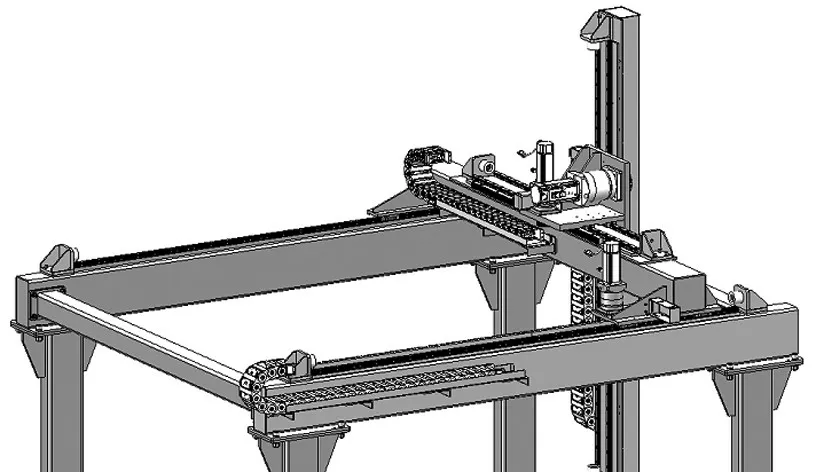
图2 三轴行架
三轴行架在Y 轴方向上的运动由电机Ⅰ驱动,为X 轴行架在Y 轴行架上的运动,电机Ⅰ连接在X 轴行架上。三轴行架在X 轴方向上的运动由电机Ⅱ驱动,为Z 轴行架在X 轴行架上的运动。三轴行架在Z 轴方向上的运动由电机Ⅲ驱动,为Z 轴行架在竖直方向的移动。电机Ⅱ和电机Ⅲ均连接在X轴行架上。
抓手通过连接板与三轴行架固定连接在一起。连接板固定在抓手本体上,抓手本体固定连接有导轨,压爪通过滑块配合在导轨上。压爪由压爪气缸驱动,压爪和侧固定板之间设置有上固定板,上固定板固定在抓手本体上。并排设置有5个压爪气缸,每个压爪气缸上均连接着1 个压爪。抓手下方设置有微波炉设备,微波炉设备固定有挡板,挡板与抓手的整形板配合,待抓取物料由整形板和挡板整形后,被夹持在压爪与侧固定板之间。
微波炉设备后方设置有托盘支架,托盘支架设有托盘,抓手从微波炉设备夹持待抓取物料移送到托盘上。
2 码垛的实施
多功能叶腊石末端执行器结构如图3 所示。由于Z 轴行架垂直固定在X 轴行架上,X 轴行架移动时会带着Z 轴行架一起移动。抓手固定连接在Z 轴行架,Z 轴行架在竖直方向上的移动改变抓手在竖直方向上的高低位置。3 个电机分别驱动3 个方向上的行架来改变抓手的空间位置,实现抓手的抓取及码放。并排设置有5 个压爪气缸,每排之间零件有可能大小不一,因此一个压爪由一个压爪气缸驱动。压爪气缸驱动压爪沿着导轨移动,从而改变压爪与侧固定板之间的距离。
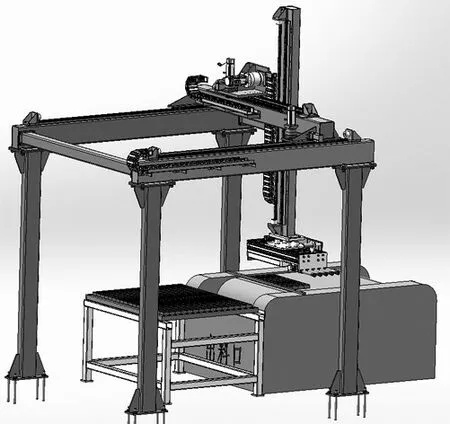
图3 多功能叶腊石末端执行器
当微波炉设备上烘烤好的叶腊石走到挡板处后停止,通过三轴行架将抓手移动到叶腊石上方,整形动力气缸和整形板对叶腊石来料方向进行整形,通过整形板与挡板将叶腊石在前后两个方向上整理整齐,压爪气缸与压爪对叶腊石来料的垂直方向整形及固定,即对叶腊石在左右两个方向上整形。整形后抓手抓取叶腊石,通过三轴行架带动抓手移动,将叶腊石码放到托盘中,然后逐续摆放。
3 本研究对行业的启示
超硬材料被称为“工业牙齿”“终极半导体”“材料之王”,是现代工业高端发展不可替代的高档工具之一,对国民经济发展有百倍以上的杠杆撬动作用。世界的超硬材料看中国,中国已经形成巨大的超硬材料产业链优势。但是,“大而不强”的问题日益突出。目前人造金刚石生产过程中,大量依靠人工操作生产设备、调整工艺参数,这是导致金刚石质量不稳定的主要因素。尤其随着压机的大型化,人工操作设备已经越来越不现实,当前的装备技术和生产工艺已经不能满足生产需求,急需转型升级。例如,采用工业机器人代替人工操作设备,应用大数据技术实现工艺自动化等。本文介绍用于工业机器人码垛的多功能叶腊石码垛执行器的开发,有利于工业机器人代替人工操作设备。从整个人造金刚石行业来看,转型升级可在以下3个方向进行。
(1)研发石墨柱智能生产。开发自动压制单元,实现自动送粉、自动称重、自动压制、自动测高、自动称重、自动打标、自动码盘等系列功能。
(2)研发人造金刚石合成车间智能化生产系统。研发机器人自动上下料系统,实现高精度合成自动控制、自动放合成块、自动取合成块、自动清理顶锤技术。研发高精度顶压机控制系统,提高合成质量及效率。研发合成块自动保温转运系统、行架机械手取放合成块系统、数字化增压系统、工艺优化控制系统。实现金刚石合成自动化、智能化,解决压机大型化人工操作困难等问题,降低顶锤消耗。
(3)研发合成工艺智能优化系统。引入大数据技术,在金刚石合成过程中实时高效采集功率、温度、压力、位移、电阻率、外阻值等各种工艺及设备信息,与金刚石产品的性能指标进行相关函数对比分析,构建金刚石合成大数据。研发建立标准数学模型,对数据进行挖掘及分析,实现对合成工艺自动分析、存储及优化,达到提高金刚石产能及品质的目标。
4 总结
通过压爪气缸以及整形动力气缸的夹取动作,实现了对来料的多排列抓取,从而快速对来料码垛,减轻人工劳动强度,提高了生产效益。最后,展望人造金刚石行业智能化改造的3 个研发方向及目标。
本研究受到郑州市重大科技创新专项“人造金刚石智能制造工艺与装备研究开发及产业化”项目资助。
