3WP-200型植保机器人喷洒摆动机构设计与试验
2021-02-08张义胜宫玉敏刁培松侯心爱
张义胜,宫玉敏,刁培松,刘 琦,侯心爱,郭 刚
(1.淄博市农业机械研究所,山东淄博 255086;2.山东理工大学,山东淄博 255000;3.山东鲁虹农业科技股份有限公司,山东曲阜 273100)
0 引言
随着农业种植结构的调整和农业机械规模化生产的提高以及国家农机购置补贴政策的实施,现代化的植保机械越来越被农户所需要,该行业正在进入一个飞速发展的时期[1]。
传统的喷药方式采用人工式喷药,不仅工作强度大、喷药不均匀,且可能出现重喷、漏喷等情况,无法保证喷雾质量,对环境也会产生一定的污染,使作物产生抗药性,增加作物感染寄生虫的风险,还会造成直接或间接的人体伤害[2]。
农作物病、虫、害防治是劳动强度最大的田间劳动[3]。植保机器人作为一种高效的施药机械,与传统的施药机具相比,它的出现不仅极大地减轻农户的劳动强度,还大大地提高农户的工作效率,实现化肥减量提效、农药减量控害并避免了药液在空气中散播造成人员中毒的危险,同时明显减轻对土壤污染[4]。
广大的山区或丘陵地区,种植地块面积小,道路狭窄,大型植保机械不方便进入土地作业,因此,小型智能植保机器人,具有广阔的市场前景。
市场上常用小型智能植保机器人喷洒装置摆动结构之一,采用连杆机构。针对连杆机构运转不平稳、死点、急回运动特征、尺寸较大等缺点,设计了一种齿轮传动摆动机构,取代连杆摆动机构。
1 连杆机构喷洒摆动装置
如图1所示,市场上常用小型智能植保机喷洒装置的结构,由摆动机构、电机护罩、电机、减速机、喷洒装置固定板、喷洒机构组成。
如图2所示,摆动机构总成由螺栓、电机摆动拉杆、连接杆、关节轴承、螺母、喷洒机构与摆动机构连接杆等组成。
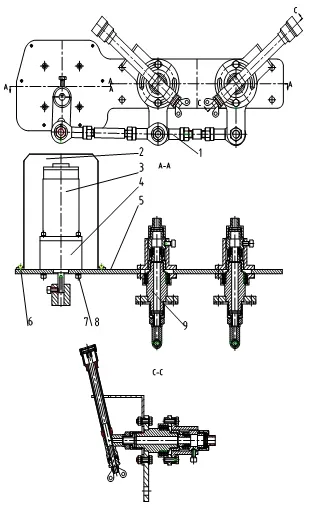
图1 连杆机构喷洒摆动装置
2 齿轮机构喷洒摆动装置
如图3所示,喷洒装置采用齿轮传动摆动机构,去掉了连杆机构。更换了喷洒机构固定板,增加了电机主动齿轮、喷洒机构被动齿轮A、喷洒机构被动齿轮B、一个被动齿轮介轮A、一个被动齿轮介轮B。

图2 摆动机构总成
图4为电机主动齿轮结构,外圈为不完全齿,特点是只保留一部分齿,对称保留了两个略小于90°范围的齿。在没有齿的区域,齿轮空转,不传递动力。
图5为喷洒机构被动齿轮A、B结构。
被动齿轮A、被动齿轮B、被动齿轮介轮A、被动齿轮介轮B的外圈为全齿结构。
电机主动齿轮与喷洒机构被动齿轮A、B的齿数、模数完全一样,即分度圆直径大小一样。
被动齿轮A、B分别安装在喷洒机构的两个转子上,带动两个喷枪的转动。
介轮A、介轮B用来改变被动齿轮A、B的转向。
图6为介轮B安装图。介轮B通过固定螺母、垫圈、轴承、轴用弹性挡圈、传动轴安装在固定板上。
图7为介轮A安装图。介轮A通过固定螺母、垫圈、轴承、轴用弹性挡圈、传动轴安装在固定板上。
3 齿轮传动摆动机构工作原理
如图3所示,按照电机顺时针方向转动设计,主动齿轮带动被动齿轮A逆时针方向转动,由于介轮A的缘故,被动齿轮B也逆时针方向转动,共同带动喷洒机构的喷枪向左边转动,此时介轮B空运转。
图3所示位置,为喷枪左极限位置,电机主动齿轮下部90°范围的齿已经工作完毕。
此时,电机主动齿轮上部90°范围的齿开始和介轮B接触,介轮B始终和被动齿轮B接触,由于介轮B的缘故,被动齿轮B开始顺时针方向转动,同样由于介轮A的缘故,被动齿轮A也开始顺时针方向转动,共同带动喷洒机构的喷枪向右边转动。

图3 齿轮摆动机构

图5 被动齿轮A、B结构图

图6 介轮B安装图
图8所示位置,为喷枪在右极限位置。此时,电机主动齿轮上部90°范围的齿开始和介轮B脱离接触,电机主动齿轮下部90°范围的齿开始和被动齿轮A接触,摆动机构带动喷洒机构开始向左边转动,进入下一个摆动循环。
电机主动齿轮转动一圈,带动摆动机构,使喷枪从左极限位置移动到到右极限位置,完成一个摆动循环。
在电机的带动下,通过齿轮传动,带动喷洒机构的喷枪左右来回摆动。由于齿轮传动是连续传动,故摆动机构运转平稳,结构尺寸紧凑,克服了连杆机构存在的死点,急回运动特征,尺寸大等缺点。

图7 介轮A安装图

图8 喷枪在右极限位置
4 齿轮摆动机构零部件的设计
4.1 摆动电机的选择
参考同类型电机的功率,采用直流小型齿轮减速电机,电机型号为3DCD24-40-30型,功率40 W,电压24 V,转速3 000 rpm。减速机型号为3GN120K,减速比120,即减速机输出转速为25 rpm。
4.2 电机主动齿轮
电机主动齿轮的结构,如图4所示,齿轮分度圆直径为:

式中:d1—主动齿轮分度圆直径(mm);
m—齿轮模数,选用1;
z1—主动齿轮齿数,设计为90;
计算分度圆直径为90 mm。
电机主动齿轮的外圈保留一部分齿,对称保留了两个72度范围的齿,即保留19×2=38个齿,其余齿去掉。
主动齿轮的内孔与电机轴用平键联接,用于传递动力。
电机主动齿轮的宽度设计为10 mm。
在没有齿的区域,与被啮合的齿轮没有接触,齿轮空转,不传递动力。
由于电机主动齿轮对称保留了两个小于90°范围的齿,主动齿轮上半部齿在脱离被动齿轮A时,其下半部齿和介轮B尚未接触;同样,电机主动齿轮下半部齿在脱离介轮B时,其上半部齿和被动齿轮A尚未接触;在以上两个位置时,喷洒装置喷枪处于短暂停止摆动状态,这样设计的目的是避免传动干涉。
4.3 被动齿轮
被动齿轮A、B的齿数、模数与电机主动齿轮完全相同。
如图5所示,被动齿轮A、B用两个螺栓与喷洒机构连接在一起,带动喷洒机构的喷枪一起转动。
被动齿轮A、B的宽度设计为10 mm。
4.4 介轮B
如图6所示,介轮B分度圆直径为:

式中:d2—介轮B分度圆直径(mm);
m—齿轮模数,选用1;
Z2—介轮B齿数。
被动齿轮A和被动齿轮B的中心距设计为130 mm,由此计算出介轮B的齿数Z2为40,分度圆直径d2为40 mm。
介轮B的宽度设计为10 mm。
4.5 介轮A
如图7所示,介轮A分度圆直径为:

式中:d3—介轮A分度圆直径(mm);
m—齿轮模数,选用1;
Z3—介轮A齿数(26);
计算分度圆直径为26 mm。
被动齿轮介轮A的宽度设计为10 mm。
4.6 齿轮强度计算
根据扭转强度公式估算轴径[5]:

式中:d—危险截面处的轴径(mm);
P—轴所传递的功率(40 W);
A—与材料有关的系数,选用40Cr,系数值为4.6;
ω—轴的角速度,25 rpm,即2.62 rad/s计算得到,d≥11.4 mm。
此次计算,已经将弯矩的影响考虑在内,由于本次设计弯矩很小,故减速机输出轴径10 mm即可满足强度要求。
被动齿轮A、B与喷洒机构一起转动,传递动力的最小直径是内孔,内孔直径为34 mm,满足强度要求。
介轮A、B的固定轴不转,即轴承外圈转动,计算强度应以分度圆直径为准。介轮A分度圆直径为26 mm,介轮B的分度圆直径为40 mm,满足强度要求。
5 田间试验
为了验证齿轮传动摆动喷洒机构的喷洒效果,2020年10月12日,对3WP-200型小型智能植保机器人样机进行了喷洒初步试验。试验地点是淄博市博山区源泉镇天津湾西村猕猴桃种植基地。试验地块平整,猕猴桃树行间铺设了地砖块,行距为3m,猕猴桃已经摘除,只对猕猴桃树枝叶进行农药喷试验。试验样机及试验场地见图9。
田间试验表明,齿轮传动喷洒摆动机构运转平稳,效果良好。

图9 试验样机和试验场地
6 结语
1)植保机喷洒摆动机构采用齿轮传动,取代连杆摆动机构,齿轮传动连续,电机负荷平稳,摆动机构尺寸紧凑,克服了连杆机构存在的死点、急回运动特征、尺寸大等缺点。
2)田间试验表明,齿轮传动喷洒摆动机构运转平稳,提高了农药的喷洒质量,降低了农药的喷洒数量,有利于实现化肥减量提效,减轻对土壤及空气的污染。
