柔力球运动中“弧形引化”过程的动力学分析
2020-12-23李恩荆孙勤燕王文忠
李恩荆 孙勤燕 王文忠
摘 要:柔力球运动是以持拍带球为主的画弧运动,“弧形引化”是柔力球运动的核心概念。运用MATLAB软件的图像处理与色度原理,定量描述了柔力球球体在此运动过程中受到的摩擦力和支持力的大小及方向随时间的变化,准确地读取了柔力球体在整个弧形引化过程中不同位置随时间的变化特征,对该项目弧形引化过程动力学的定量分析进行了科学探索,并为该项目技术的发展提供了方向。
关键词:柔力球;经典力学;弧形引化;MATLAB软件
中图分类号:G849.9 文献标识码:A 文章编号:1009-9840(2020)05-0040-08
Abstract:Taiji-tender-ball is a drawing arc movement with racket and ball as the main part, and arc initiation is the core concept. Based on the image processing and chromaticity principle of MATLAB software, this paper quantitatively describes the variation of friction force and support force and direction with time, accurately reads the variation characteristics of different positions of flexible sphere with time in the whole process of arc priming, and moves the process of arc priming of this sport. The quantitative analysis of mechanics has made scientific exploration and provided a direction for the development of technology.
Key words:Taiji-tender-ball; classical mechanics; arc induction; MATLAB software
随着经济的发展和人们生活水平的日益提高,人们越来越渴望拥有健康的身体,并积极加入到各式各样的体育运动中。在各项体育运动迅速开展的同时,柔力球走进了我们的生活并如火如荼地开展起来。柔力球运动是一改传统硬性击球方式,以“弧形引化”过程触及球体并顺势将球抛出为主要技术特征的,具有鲜明民族特色的新兴体育运动项目[1]。“弧形引化”过程作为柔力球运动最本质的特征,在该项运动发明之初,就在推动和发展柔力球运动技术中具有着不可替代的核心地位。但经过20余年的发展,对“弧形引化”过程自身理论的客观解释却还是停留在对原有太极拳理论的直接引用,特别是对于 “弧形引化”过程中的“迎、引、抛”三个环节是否能构成一个完整的圆以及其三个环节的受力分析特征缺乏详尽的动力学和物理学分析,严重阻碍了运动的良性发展。为此,本文以柔力球拍和球体在弧形引化过程中,拍面和球体所受力学进行分析,从动力学和力学角度解释“弧形引化”这一概念,为准确分析柔力球运动形式、完善该项目力学原理提供理论基础。
1 研究对象与方法
1.1 研究对象
以完整的“弧形引化”过程中球与球拍相互的受力关系为研究对象。
1.2 研究方法
1.2.1 文献资料法
以“柔力球”“经典力学”“弧形引化”等为关键词在中国知网、华中师范大学图书馆等平台查阅大量的相关资料,基本了解本研究相关的动态、程度、现状以及存在的问题,并对其进行搜集、整理和分析。
1.2.2 实验法
1.2.2.1 实验仪器及处理软件
以一名国内顶级柔力球运动员为拍摄对象。实验仪器为柔力球球拍一支与标准用球一个、60 cm刻度尺一把和一个帧频率为25的sony高清摄像机一部。
实验数据经MATLAB R2014a軟件处理。
1.2.2.2 实验步骤
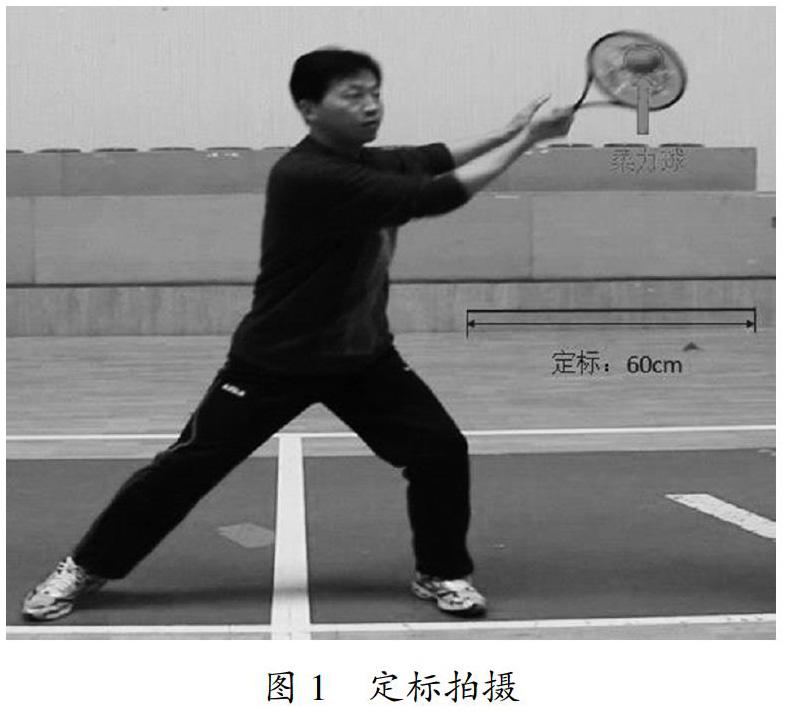
1)取景。选择室内光线较好的场馆,采用固定机位距离被拍摄者3.5 m左右。镜头与被拍摄者直立时的肩部同高(见图1)。为使拍摄清晰可靠,拍摄时充分考虑到球拍以及球体颜色与背景色差关系。
2)定标。在柔力球运动平面上固定一把60 cm刻度尺,使得图片像素点与实际长度对应,进而对摄像机拍摄的图像进行校差。
3)测量。实验者进行柔力球基本技术动作“正手接抛高球”,并将此过程通过摄像机完整记录,利用软件读取柔力球球体运动轨迹。
1.2.3 个案分析法
以柔力球中最重要的基础动作——左右摆动为个案研究,通过动力学和力学原理分析其受力情况。
2 研究结果与分析
2.1 坐标系的选择
建立坐标系,一般在参照物上选择一点作为坐标系的原点,通过原点标明长度单位的有方向的线作为坐标轴[2]。常用的坐标系为直角坐标系。它不仅在性质上起参照系的作用,而且在数量上使运动的描述精确化。
在柔力球运动中,如果取身体的支撑点作为坐标原点来分析柔力球的运动状态,则球处于身体转动的复合运动状态,球在直角坐标系中的运动轨迹是一条空间曲线,不同的动作球的运行轨迹也不同。运行轨迹可以用一个空间曲线方程来表述,即:f=x+y+z+c。从这个抽象方程看不出圆、圆弧的形象,无法说明柔力球运动“一个圆”的基本概念,所以,以身体的支撑点作为坐标系的原点是不能直观讨论“一个圆”的基本原理和对此进行力学分析。
取肩关节作为坐标原点,分析柔力球的运行轨迹,则描述柔力球竞技理论“一个圆”就比较容易和直观。因为在圆弧引化时,按技术要求持拍手臂伸直以肩关节为圆心旋转,当旋转一周时,手臂和球拍划过的轨迹将形成一个圆锥面,而球的轨迹是一个圆,圆锥面和圆面围成一个圆锥体(如图2所示)。
只有在手臂旋转杀球时R才可能接近L,从图2可以看出柔力球引化过程中确实在“画圆”,只不过在运动过程中的引化常常是一个圆弧。因此从“画圆”这个技术要求来看,以肩关节为坐标原点表述更为恰当,而且以肩关节为圆心画圆,符合“一个圆”的基本概念,即球从入拍到出拍的运行轨迹应当是一条连续、光滑、完整的圆弧线。
2.2 运动学轨迹的拟合
通过MATLAB软件对图像进行分析处理,步骤如下:
1)分帧处理。利用MATLAB软件将视频分解为0.04秒一个图片画面,整个“正手接抛高球”的过程分解为 16个画面。
2)确定位置。利用MATLAB软件色度分析功能,读取经分帧处理后每张图片中柔力球体的位置(以球体中心点为标准),结合之前的定标工作,即可得到柔力球体的完整运动轨迹。
3)曲线拟合。对于读取的离散数据点,用最小二乘法进行曲线圆拟合。拟合结果如图3所示。
利用MATLAB曲线拟合工具箱得出拟合优度R2=0.961。理论上,当拟合优度大于0.9时,就已经说明“弧形引化”过程就是一个几何学意义上的标准圆。所以从运动学上说明,柔力球球体的“弧形引化”过程运动轨迹是一个可以完全实现的标准圆。
2.3 运动学方程的拟合
从图3可以看出,运动的分析基于所建立的平面直角坐标系,利用运动分解的思想,将该运动分解成x方向上的运动和y方向上的运动,利用MATLAB曲线拟合工具箱,利用3阶多项式函数对图4和图5的离散数据点进行拟合。
2.5 力随时间变化的方程导出
令(3)式中m≈0.053kg,g=9.8m/s2进行定量计算,利用MATLAB数据可视化功能,得到支持力FN在一个“正手接抛高球”运动内随时间变化的图像,如图7所示。在设定的物理力学模型中,假定柔力球球体为一个质点,但在柔力球球体在实际运动过程中,存在一定的滚动,所以摩擦力的分析不能采取质点力学的方法,还需考虑滚动摩擦力。
2.6 柔力球弧形引化过程力学分析
2.6.1 理想状态下的力学分析
以柔力球运动中的左右摆动为例,球拍带球在竖直平面内做一个半径为R的半圆运动。如图8所示,圆心为o,两侧的最高点A、E与o在同一水平线上。且小球在这两点的速度均为零。在弧线的中点c,即轨迹的最低点速度最大。B为AC间任一点,D为CE间任一点,忽略运动中的空气阻力和摩擦力。
如果运动员控制得好,正好是FN在t轴方向的分力与空气阻力f平衡,则与图8中小球的运动情况一致。如果小球在运动中受到空气阻力很小,图9中的α必然很小,甚至可能为零。这就提示我们,在不考虑空气阻力和摩擦力的情况下,球拍弧形引化是完全可能达到理想状态下的物理学意义上的标准圆弧曲线运动。
2.6.2 考虑拍面弹力作用下的力学分析
柔力球规则要求,柔力球拍是用有弹性的橡胶材料制成[4]。因此,在考虑其运动过程中,拍面对球体的弹性作用力下,球体将会出现以下3种情况:
2.6.2.1 球做匀速运动
如图10所示,AB为球运动路线所在平面与球拍的交线,C为球与球拍的接触点。球沿AB方向运动。如果球做匀速运动,则小球所受支持力垂直于AB,支持力只提供球所需要的向心力,不提供沿运动方向的分力。
2.6.2.2 球做加速运动
如果小球做加速运动,则球拍与球之间的状态如图11所示。小球处于球拍后侧,球与球拍接触点C偏后。由于球拍的形变使AC和BC的不对称,而使小球所受的支持力FN斜向前方。FN的一个分力提供向心力,另一个分力使小球做加速运动。
2.6.2.3 球做减速运动
如果球做减速运动,则球拍与球之间的状态如图12所示。小球处于球拍前侧,球与球拍接触点C偏前。由于球拍的形变,使小球所受FN斜向后方。FN的一个分力提供球做圆周运动所需的向心力,另一个分力使小球做减速运动。
2.6.3 摩擦力状态下的力学分析
在实际运动中,球拍与球体之间存在一定的摩擦力。因为球与球拍均为滚动摩擦,所以摩擦力较小。在小球沿速度方向的加速度at较大时可以忽略,比如力量较大的正手侧旋。但是在小球沿速度方向的加速度at较小时,摩擦力的作用会表现出来,导致出现小球做加速和减速运动,这时球与球拍之间的关系如图10的情况。
2.6.4 考虑到球体内沙粒运动的力学分析
以自然坐标系为参考系。有一只自然坐标系为非惯性系,物体受到非惯性力(离心力)。球内沙粒的状态如图13所示。当小球逆时针转动一个较小的角度时,由于沙粒之间的摩擦力,球内沙的状态如图14所示。此时离心力的转动力矩,会使小球有顺时针转动的效果,小球由相對球拍顺时针转动的趋势,球与球拍之间的摩擦力使小球有逆时针转动的效果。如果小球在向右运动,则摩擦力对小球做正功,加快小球的运动;如果小球在向左运动,则摩擦力对小球做负功,阻碍小球的运动。
由于沙粒之间的摩擦力较小,当小球转动的角度超过临界值时,球内的沙粒就会突然发生像雪崩一样的变化,之后再次达到一个平衡。此时我们可以从外面听到沙粒滑动的声音。因此有摩擦力提供的动力是有限的,所以在小球沿速度方向的加速度at较小时,可能出现小球加速和减速运动时球与球拍之间关系如图10的情况。
3 讨论
3.1 关于柔力球体入拍时的功能转换的讨论
在柔力球现有理论体系中对柔力球引化过程总结为“(球拍)边框进,边框出”。按功能转换,球拍和球必须做功才能引化住球。当球入拍角α≈0接近为零时,球和球拍几乎不会变形也不会做功,球的能量也不会转为功,其结果是球滑拍而过,或者球在动能作用下在拍面弹起。因此该说法并不准确。
3.2 关于柔力球球出拍后飞行的动力来源的讨论
力是物体之间的相互转化,一个物体受到力的作用,一定有一个物体对它施力的作用,前者为施力体,后者为受力体,力不能离开物体而独立存在[5]。一般分为场力、弹力、摩擦力,力是矢量,有大小、方向作用点。按柔力球技术要求,当球拍挥旋停止和减速时,在旋转惯性的作用下,球会飞离球拍沿圆弧切线方向作抛物线运动,也就是说最后出球时,球拍应沿着引化圆弧的切线方向挥出[6]。这指明了球拍通过手臂加力方向(图17)即切线方向,球在离拍后瞬间时受力状态(图18)。
一个是球拍加力,一个是柔力球重力,一个是圆弧引化产生的离心力。从球和球拍相对位置来看,球拍不能把力直接传递给球,如果把力直接传递给柔力球,就会出现变向加力(引化变向)(图19)所示,或用腕力折向发力(图20)所示。
如果直接加力在球上,会比较容易控制球。因F>f,球的速度加快,落点更准确。但这是违例动作,也是在竞技运动中经常出现的问题。按技术要求,沿着引化圆弧切线方向挥出球拍,球拍和球也是相切关系,力的传递只能通过与物体间产生的摩擦力把球抛出。惯性定律即牛顿第一定律,指的是任何物体在不受外力作用的情况下,都有保持其现有运动状态的性质,它的大小是物体质量[7],柔力球即m=0.05 kg,在重力场中重力为mg,方向指向地球球心,和物体运动方向不一致,所以它不是柔力球运动的动力。在《柔力球教学》教材第14页提到旋转惯量,在物理学中也常用转动惯量来描述一些现象,它是物体在转动运动中保持原有运动状态的性质,是研究和描述物体转动规律的一个重要物理量,与物体的质量、转动中心、质量分布有关[8]。柔力球引化旋转是一次力形成的动作,还没有形成高速旋转球就已经抛出,况且球的质量很小,所以它的转动惯量可以忽略不计。所以柔力球球出拍后飞行的动力来源主要是通过球与球拍之间的摩擦所产生的摩擦力将球击出。
3.3 “迎、引、抛”三环节的力学解释
在竞技柔力球比赛中,注重“迎”“引”“抛”三个步骤,其中“引”是中心过程,即通过人体控制使得球同球拍一起做圆周运动,而“迎”是让拍面的法向量方向与球的速度方向垂直,为“引”这一过程的圆周运动提供初始条件,“抛”的标准动作与迎球类似。下述力学将分析一个标准的“迎”“引”“抛”三环节。
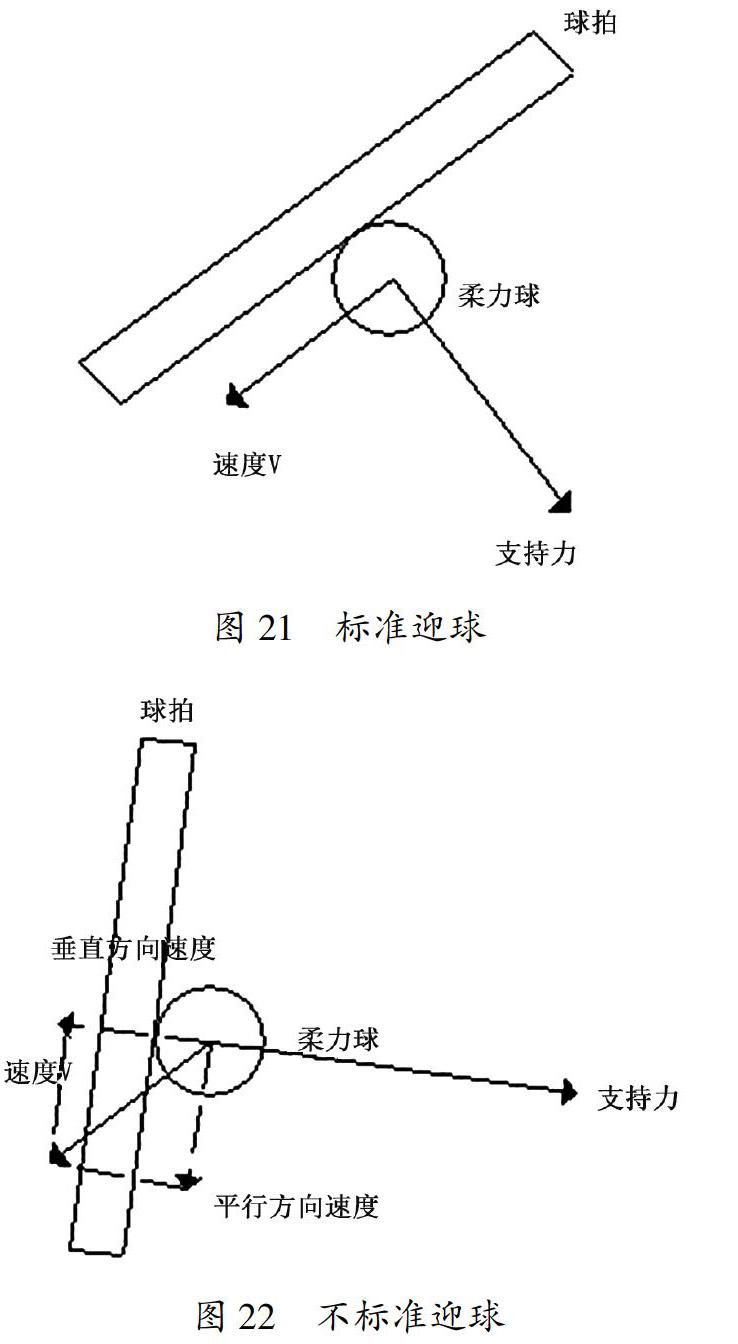
在迎球过程当中,运动员必须调整拍面方向使得柔力球的速度方向与拍面平行,如果迎球不标准,那么就会出现柔力球撞击球拍的现象,称之为“撞击”,标准迎球和不标准迎球的示意图分别如图21、图22所示。其中标准迎球时,球体运动方向与拍面成平行,而不标准迎球则球体运动方向与拍面成一定夹角。
图22中速度分解成垂直于拍面的速度和平行于拍面的速度,那么出現不标准迎球时,支持力除了要提供向心力以外,还需将垂直方向上的动量变为0,故此时支持力要比标准迎球时的力大,所以不标准迎球会对柔力球球拍拍面有较大的损伤。
在正手接抛高球的过程中,球体到球拍的垂直瞬间,支持力逐渐减小,但随着运动圆弧轨迹的增加,支持力会因为球体重量的关系逐渐增大。支持力减小可以体现“引”的特点,也将柔力球的“柔”表现得淋漓尽致。这种自然而然的引化和自然而然的抛球技术,也是高度把握了球的运行规律后形成的结果,所以接球时才悄无声息,柔顺至极,引化时才圆融连贯,完整如一,画出了完美的曲线,抛球时才出现“无为无不为”的巨大进攻威力[9]。
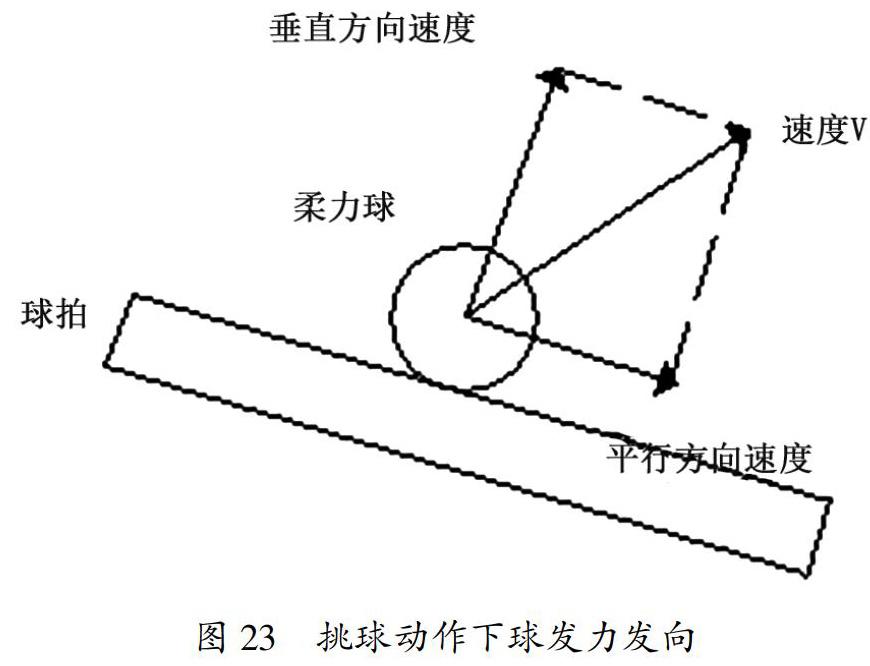
在抛球环节中,其标准动作和迎球动作类似,都要求柔力球的速度、方向与拍面平行,如果动作不标准,会出现挑球动作,如图23所示,垂直方向动量变化由于手腕对球拍的力的作用,挑球和撞球一样,对柔力球球拍会有较大损伤。
通过对柔力球“迎、引、抛”三个基本技术动作的详细力学分析,我们可以清晰地看到其与羽毛球、网球等运动方式的不同。它讲究的是“以柔克刚”,即在顺应来球速度和方向的基础上,通过“迎、引、抛”三个技术动作巧妙地将“来的力”化掉,并赋予其“新的力”[10]。这三个动作连接间一气呵成不拖泥带水、浑然一体,称之为“弧形引化”过程,也体现了柔力球运动独特的运动魅力。
3.4 柔力球运动的技术特征
3.4.1 “柔”是灵魂
柔力球所有的技术动作都是连贯柔顺的,在面对来球时缓冲、退让的基础上完成的各种运动动作,但正是在以柔克刚的太极思想指导下,这种厚积薄发的力量在经过一个圆弧的加速下会变得极其威猛。 “柔”是柔力球技术的灵魂,脱了离“柔”,将脱离柔力球运动的本质[11]。
3.4.2 “圆”是核心
“圆”是化解力量和聚集力量的最佳选择,柔力球所有的技术动作都是以画圆或画弧为核心的[12]。人体在打球时是动态的,渐变的,处于运动的多关节,多角度的复合状态,在训练和比赛中我们要最大可能地使球拍控球的弧线过程保持在“一个圆心”“一个半径”“一个平面”的圆弧上,这样才能使动作不仅有力度而且有美感[11]。
3.4.3 “退”是前提
柔力球每一个技术动作的完成都是以退为前提。为顺利地完成技术动作,只有接球后合理地退让才能蓄集更大的力量,这正是所谓“以退为进”的战略思想,是柔力球技术的重要环节[11]。
3.4.4 “整”是根本
《太极拳谱》认为“力发之于足,行之于脚,主宰于腰,形于手指”[13]。柔力球从入球到出球终是在一条完整连贯的弧形曲线上运动,其运动轨迹是不可分割的“一条圆弧”[11]。无论是练习还是比赛,只有参与者做到了身体和拍体的运动轨迹“整体合一”,其技术动作才是准确的。
3.4.5 “灵”是目标
柔力球运动特别强调运动中对灵性的展示。具体表现为身体灵敏、编排灵慧、战术灵变、线路灵巧、落点灵活和接抛球方式灵动[11]。“灵”作为柔力球运动技术的最高目标,向人们展示了柔力球多元、多变的一面。
从柔力球的运动表现形式可以看出,“柔、圆、退、整、灵”是柔力球运动技术的外在直观表现,而“弧形引化”是贯穿其中的核心特征,二者互为表里,使得柔力球所有的技术动作都是一个完整的圆弧运动。因此“弧形引化”是柔力球运动概念的内涵,也是其本质属性,更是使得柔力球运动独树一帜,区别于其他运动项目的根源所在。
3.5 关于“圆”与“弧”的讨论
关于柔力球运动中的“圆”与“弧”的讨论由来已久。柔力球在竞技比赛规则中明确规定,“球在入球拍后运行的弧形曲线不得超过360度必须出球,否则违例”[14],因此柔力球运动仅仅是画一个弧,而不是圆;但也有学者认为,柔力球技术强调“环环相扣、势势相连”本身就是更多圆的叠加,因此应该成为“画圆”运动[11]。
在物理学中,圆是指到定点的距离等于定长的点的集合,这个定点叫做圆心,表明圆是一个由固定半径长度加圆心组成的在一个平面内的闭合几何图形。而作为圆上任意两点间的部分称为圆弧(简称弧),圆上任意一段长即称为圆弧。这个概念表明,圆是由各个长度不同的弧组成,圆本身作为弧的集合,是依附于弧存在而存在,各个长短不一的弧构成了一个完整的圆,因此画弧并不违背柔力球本身是以画圆为基本运动形式的球类运动。所以“弧形引化”过程作为柔力球运动的基本特征是符合该运动特点的,而在柔力球运动中,“圆”与“弧”均为柔力球特有技术的表现特征。
4 结论
4.1 柔力球球体的“弧形引化”过程运动轨迹是一个几何学意义上的标准圆弧曲线运动,从运动学上来说也是一个可以完全实现的标准圆,并且其运动性质是一个非匀速运动的圆周运动。
4.2 柔力球体入拍时,球体瞬间静止在拍面上,动能为零,动能全部转变为做功之和。表明球入拍,球体与拍面必然产生包括摩擦力和拍面弹塑性在内的多种力。
4.3 柔力球从接球到抛出球的运动轨迹是一条连续、光滑、完整的圆弧曲线,球出拍后飞行的动力来源主要是通过球与球拍之间的摩擦所产生的摩擦力将球抛出。挥拍运动的动作越快,角速度越大,则球对球拍的压力越大,摩擦力越大,球速越快。
4.4 小球在拍面运动过程中受到重力、支持力、空气阻力,其中摩擦力和支持力是最主要的两个约束力。球内沙体对球速的运动有一定影响,但影响可忽略不计。
参考文献:
[1]李恩荆.太极柔力球的现状与发展对策[J].北京体育大学学报,2002,25(6):855-856.
[2]李昌新.谈谈坐标系的选择[J].中学数学教学,1997:34-35.
[3]戴邦利.“圆周运动”一课内容适当调整的实践及思考[J].物理通报,2014(10):44-45.
[4]中国老年人体育协会柔力球专项委员会编.2015年版柔力球竞赛规则[M].深圳:深圳市黄岗体育投资有限公司,2015.
[5]秦正龍.怎样理解力的作用是相互的[J].初中生世界:八年级物理,2013(Z2):21-23.
[6]张艳青.柔力球竞技核心技术“弧形引化”训练探析[J].唐山师范学院学报,2013,35(2):76-79.
[7]王明奇.力学知识在体育运动中的应用研究[J].中学物理数学考,2018,47(7):48-49.
[8]张道清,肖世发.共振法测刚体转动惯量的研究[J].大学物理实验,2018,31(4):45-48.
[9]杨建营.太极柔力球运动的文化内涵及其思想根源剖析[J].北京体育大学学报,2013,6(36):36-42.
[10]陈春峰,滕育松.柔力球研究[J].体育文化导刊,2015(12):53-57.
[11]李恩荆.对柔力球运动基本概念的探讨[J].北京体育大学学报,2012,35(11):124-128.
[12]白榕.太极柔力球教学与研究[M].深圳:深圳音像出版社,2008.
[13]王宗岳,等著,沈寿,点校考译.太极拳谱[M].北京:人民体育出版社,1995.
[14]中国老年人体育协会柔力球专项委员会编.2011版柔力球竞赛规则[M].北京:2012.
[15]李亚南,段全伟,童胜玢.2017年全运会柔力球项目技术运用特征的研究[J].北京体育大学学报,2018,41(5):95-99.
[16]姜娟,刘志华,孙爱平.太极拳助力健康中国建设的科学支撑与路径研究[J].沈阳体育学院学报,2018,37(4):126-132.
[17]王纳新.论“太极拳道”[J].北京体育大学学报,2018,41(8):127-131.
[18]曲焱炎,高岱,宫娜.圆锥内定点至锥表面垂点轨迹[J].哈尔滨工业大学学报,2016,48(7):73-75.
[19]侯新杰,陈留定.基于科学本质显化的教学目标设计研究——以高中“牛顿第一定律”为例[J].教育科学研究,2017(10):66-70.
[20]吴昊,马凯,解敏.论经典力学中的参考系[J].力学与实践,2018(40):319-322.
[21]杨建英,杨建营.太极类运动文化的传承体系研究[J].体育文化导刊,2016(6):65-68.
[22]王存良.太极拳的生活智慧与启示[J].体育文化导刊,2017(6):66-69.
[23]姚小琴,蔡才福.创设情景化解摩擦力难点[J].物理教师,2018,39(9):81-82.
[24]陈来.朱子《太极解义》的哲学构建[J].哲学研究,2018(2):41-48.
[25]邓林红.力学与奥林匹克体育运动[J].力学与实践,2008,30(3):1-9.
