无人驾驶环境下城市交通空间优化设计探讨
2020-11-12王维礼郑莘荑
王维礼, 郑莘荑, 朱 杰
(1.天津大学 建筑学院,天津 300072;2.天津市市政工程设计研究院,天津 300392)
2016 年以来,无人驾驶汽车进入发展的快车道,2018 年4 月,工业和信息化部、公安部及交通运输部联合颁布《智能网联汽车道路测试管理规范(试行)》,标志着我国无人驾驶汽车时代正在急速到来。无人驾驶是交通发展的趋势,尽早研究与无人驾驶相适应的城市交通空间体系是引导城市可持续发展的重要前提,同时也是为保障无人驾驶高效运行、实现城市交通空间由机动车尺度向行人尺度转变提供技术支撑。本文结合未来交通发展趋势,通过深入研究无人驾驶、有人驾驶的各项指标,建立相应的评估体系,为城市交通空间的优化调整设计提供依据和参考,以保证交通高效运行。
1 概述
1.1 无人驾驶
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶的目标。无人驾驶汽车通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标。相比普通车辆,无人驾驶车辆具有节省时间、提高安全性、减少停车空间、提高单位车辆效益等优点。
1.2 无人驾驶与城市交通空间
无人驾驶汽车的作用机理和实现方式均与传统汽车不同,将较大程度改变城市交通空间设计的通用准则。无人驾驶采用的全自动感应操作,能够降低反应时间、缩短跟车距离、提高道路通行能力;车路协同下的无人驾驶汽车可以减少交叉口、实现绿波交通、提高平均车速;实时路况分析可以增加安全系数、规划最合理路线,以提高运输效率等。
无人驾驶对城市交通空间的影响还包括改变车行空间与人行空间的比例、行人过街方式、路侧交通辅助设施功能、交通标志标线系统、非机动车空间、停车场空间等。
2 无人驾驶环境下的城市交通特征
为确保研究的科学、合理性,本文是基于完全实现无人驾驶进行的相关研究;同时,为使研究更有指导意义,相关数据分析、设计方案与评估等内容均以天津市为例。
2.1 出行方式与出行次数预测
1)出行方式。随着城市发展及技术进步,天津市城市中心区居民的出行方式和出行结构发生了巨大变化。见表 1[1~2]。

表1 天津市中心城区居民出行方式 %
结合天津市居民出行方式变化特征、机动车发展速度、天津市相关规划和政府政策文件,对未来中心城区出行方式进行初步预测[3],见表2。
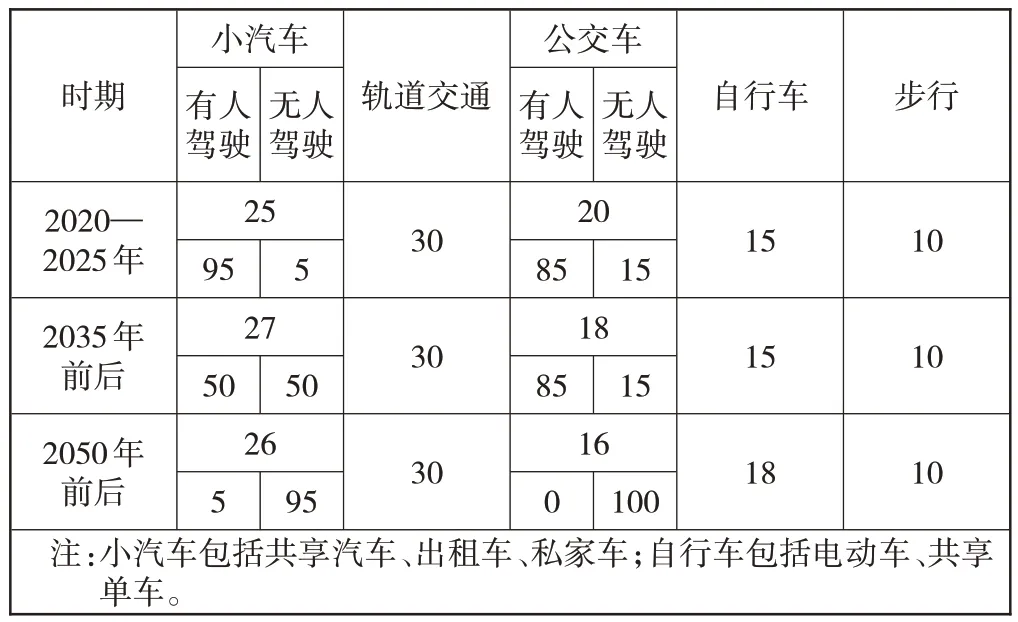
表2 不同时期城市出行方式比例 %
由表2 看出,随着无人驾驶汽车的规模化应用,凭借高效、便利的特性,小汽车出行比例会有小幅提升;轨道交通出行相对稳定;无人驾驶、共享汽车的应用,使得公交车出行会有些许下降;自行车出行随着人们的健康需求、街道空间的改善及城市环境的提升,比例会有所提升;步行比例基本不变。
2)出行次数。城市居民人均日出行次数是指城市调查范围内适龄人口全日出行总量与适龄人口总数的比值,这是相对稳定、变化极为缓慢的指标。天津市中心城区居民出行次数2000 年2.16 次(/人·d),2005 年2.21 次(/人·d),2006 年2.26 次(/人·d),2011年2.32次(/人·d),2018年2.45次(/人·d)。
可以预见,随着经济发展及出行方式的调整,人们的出行次数会逐步增加。特别是对乘坐公交车和轨道交通不便的居民,未来可以乘坐完全无人驾驶汽车、共享汽车出行,这也促进出行总量的提升。
2035 年前后,初步预测居民出行2.66 次(/人·d);考虑到人生理、心理因素的影响,居民出行次数一般不会超过3.0 次(/人·d),因此,2050 年前后的居民出行取值为3.0次(/人·d)。
2.2 城市道路交通流特征
2.2.1 城市路段选取
以天津市中心城区的交通要道——南京路为背景进行分析。南京路处在天津市中心城区核心位置,是天津人心目中的商业、交通第一路,沿途串联IT 产业、文化科技区、地铁商圈、大型商场、写字楼群,是天津市最重要的城市功能发展轴。以鞍山道—营口道长890 m 路段进行分析研究,沿途有商业中心、学校、公共管理服务中心、城市绿地,用地类型丰富,具有代表意义。机动车交通流主要考虑小汽车、公交车两种,其他紧急车辆数量较少,不会对交通流特征造成较大影响,暂不考虑。
2.2.2 现状交通流特征
现状南京路道路横断面为三块板,红线宽度为53.5 m,中央的一块板设置为双向8 车道的机动车道,见图1。路段交通流量见表3。

图1 现状南京路横断面

表3 现状南京路高峰时段车辆分布
由表3 可知,路段高峰小时小汽车与公交车的比例约为27∶1,高峰时段交通流量约为6 400 pcu/h,现状交通状况较拥堵,车流平均速度约为30 km/h。
2.2.3 混合交通过渡期
在无人驾驶规模扩张过程中,会经历一个有人驾驶汽车和无人驾驶汽车混行的过渡期。在保持现有道路通行条件的前提下,综合考虑无人驾驶、有人驾驶小汽车及公交车的通行特征。
1)通行能力
(1)不考虑公交车与小汽车干扰。基本通行能力CB是指道路与交通处于理想情况下,一条机动车道在单位时间内能够通过的最大交通量。
式中:v为行车速度;t0为车头最小时距;l0为车头最小间隔,l0=行驶速度×平均反应时间+刹车距离+安全距离。
设定30 km/h 的行驶速度,单车道的基本通行能力见表4。

表4 不同驾驶环境下道路通行能力
由表4可以看出,同一路段,30 km/h车速情况下,无人驾驶的单车道基本通行能力是有人驾驶的2.17倍。
根据当前已经进行的无人驾驶测试相关数据,对于无人驾驶、有人驾驶的混合交通车道,二者各占比50%时,相较于完全无人驾驶汽车的路况下,道路通行能力将下降30%左右。因此,对于南京路,混合交通过渡时期,单车道基本通行能力约为2 079 pcu/h。
(2)考虑公交车与小汽车相互干扰。公交车由于车速、车型、车辆性能、沿途停靠、路段流量等因素,会在一定程度上降低小汽车的通行能力。根据前文预测,2035 年前后,有人驾驶公交车出行比例为15%,其将降低8%~10%的道路通行能力;而对于无人驾驶公交车,2035 年前后通行比例为85%,参考现状通行特征及相关的研究,将降低3%~5%的道路通行能力。
综合考虑无人驾驶、有人驾驶公交车的折减,道路通行能力降低比例约为10%。因此2035年前后,综合考虑无人驾驶、有人驾驶混行,同时兼顾公交车、小汽车混行的情况,对于无人驾驶、有人驾驶的混合交通车道,二者各占比50%时,相较于完全无人驾驶小汽车的通行能力会下降30%×(1+10%)=33%,对于南京路,混合交通过渡时期,单车道基本通行能力约为2 970×(1-33%)=1 990(pcu/h)。
2)路段流量与服务水平。依据2035 年的出行方式结构预测,小汽车与公交车的比例为33∶1(小汽车比例27%,按一人一车计;公交车18%,按22 人一车计),2035年南京路路段预测交通流量见表5。
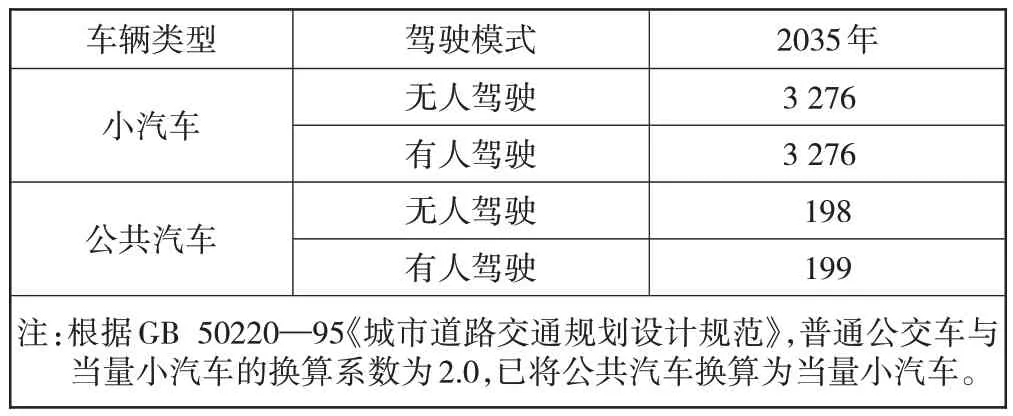
表5 2035年南京路高峰时段流量预测 pcu/h
现状路网服务水平(道路饱和度)为(5 960+440)/(1 370×8)=0.58;在保持现状道路通行条件不变的情况下,2035 年虽然交通流量有所增加,但是得益于无人驾驶汽车大幅度提升了单车道的通行能力,道路服务水平(道路饱和度)为(3 276+198+199)(/1 990×8)=0.44,较现状有所提高。
2.2.4 完全无人驾驶环境
1)通行能力。进入无人驾驶汽车时代,无人驾驶汽车比例超过95%,极小部分的有人驾驶汽车不会对城市道路交通流造成显著影响。同样在保持现有道路通行条件前提下,综合考虑无人驾驶汽车的通行特征。
2050年,仅考虑无人驾驶公交车与小汽车的互相干扰,无人驾驶公交车对单车道通行能力的影响为降低约3%(考虑所有车道混行)。因此,对于南京路,2050 年前后单车道基本通行能力约为2 970×(1-3%)=2 881(pcu/h)。
2)路段流量与服务水平预测。依据2050 年的出行方式结构预测,小汽车与公交车为34∶1(小汽车比例26%,按一人一车计;公交车16%,按20人一车计),2050年南京路路段预测交通流量见表6。

表6 2050年南京路高峰时段流量预测 pcu/h
在保持道路通行条件不变的情况下,道路服务水平(道路饱和度)为(7 402+435)/(2 881×8)=0.34,路段的通行情况进一步优化。
3 城市交通空间优化设计方案探讨
3.1 车道宽度与数量
为保证研究成果的可行性,以2050年完全实现无人驾驶汽车为前提,以南京路的车流量为基准,首先基于2050 年的不同车道数、不同车道宽度进行假设,通过计算相对应的道路空间占有率和道路饱和度两个重要指标进行预测比较。

式中:K为道路空间占有率;D车为机动车车道总宽;D为道路红线总宽度;λ为道路饱和度;V为高峰小时交通量;C为95%无人驾驶车辆环境下基本通行能力,C=μ·N·CB;μ为综合修正系数,与无人驾驶汽车比例相关,取0.63~0.95;N为车道数。
由于无人驾驶汽车取消了驾驶操作台,车宽普遍较有人驾驶车辆窄,约为2.2 m,在满足车辆通行基本宽度的条件下,车道宽度对道路通行能力的影响可以忽略。因此,在车道数N一致的情况下,车道宽度对道路饱和度的影响可以忽略不计(车道宽度为3.0 m与3.5 m 条件下的道路饱和度曲线重合);随着车道数的增加,空间占有率增加,道路饱和度减小。见图2。
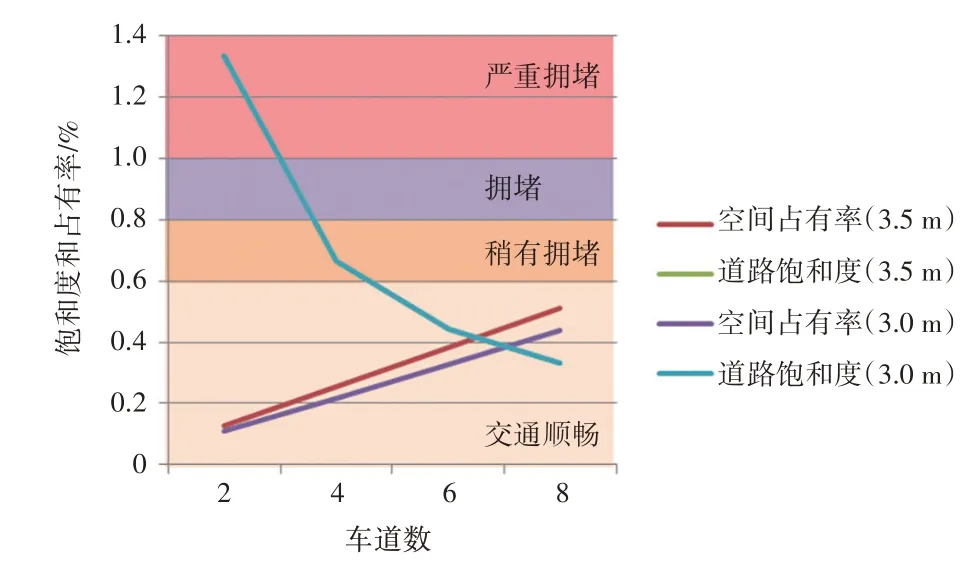
图2 道路饱和度与空间占有率曲线
最高效的断面方案应对应最小的空间占有率和最适宜的道路饱和度。分析图2,最适宜的车道数为4~6,最适宜的车道宽度为3.0 m。为使机动车行空间最小化,建议设置双向4车道,同时考虑过渡期无人驾驶和有人驾驶车辆混行环境,单方向选取3.0 m+3.5 m的断面形式,其中无人驾驶车道宽3 m;外侧车道为混行车道,需满足有人驾驶车辆、公交车辆的通行以及作为无人驾驶汽车的上下乘客港湾车道空间,为3.5 m。见图3。
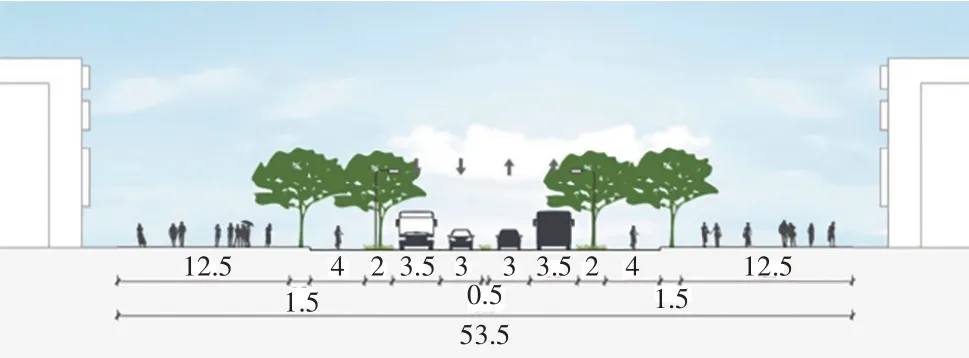
图3 南京路断面优化方案
3.2 交叉口通行能力
主路与支路相交时,交叉口的实际最大通行能力

式中:Cm为主路最大通行能力;Cn为支路最大通行能力;Kt为系统损失率,取0.88;p为主路支路通车的时间分配比,取0.6[4]。
计算得到优化前后南京路交叉口理论通行能力,见表7。

表7 优化前后南京路交叉口理论通行能力
由表7 可知,通过断面优化可将交叉口的通行效率提升约24%。
3.3 路段延误
城市道路路段行车延误最重要的影响因素为行人平面过街方式所造成的交通流中断,而行人过街产生的路段通行延误时间与行人过街所需用时密切相关,在步速相同的情况下,主要由行人过街需穿越的机动车道宽度决定。
通过优化道路断面,机动车道总宽度将缩短至13.5 m,行人与自行车通过交叉口的距离大大缩短。当前南京路由北向南需穿越的机动车道路空间为28.5 m,平均耗时约30 s;13.5m 平均耗时约14 s,降低约53%[5]。
行人通行时间的缩短,一方面可减少机动车路段延误,提高路段通行效率;另外一方面,也在很大程度上提高了行人的过街安全。
3.4 街道整体空间变化
在保持街道空间尺度不变的情况下,机动车通行路面尺度缩小,其他空间尺度可相应增大,尤其是行人通行与休闲空间。
3.4.1 让渡空间设计
自行车专用车道作为自行车出行的基础设施,对促进、提升自行车出行比例意义重大,尤其是在共享单车大潮的推动效应下,绿色慢行出行成为人们出行时尚之选。
现状南京路的部分路段自行车专用车道是缺失的。无人驾驶汽车时代,得益于机动车路面缩窄,自行车专用车道将得到充分保障,而且相应的附属设施也将会布置于街道空间之内,使得自行车出行更加有舒适、有满足、有兴趣、有尊严。
3.4.2 慢行空间的设计
无人驾驶汽车时代,机动车道数量与尺寸大幅减少,慢行空间大大增加,功能也更加多样化,可以作为小型绿化场地,布置休闲设施,行人便利设施等[6]。
3.4.3 街道空间
街道空间尺度会逐渐由车的尺度向人的尺度转变,南京路慢行空间包括活动空间、人行道、非机动车道、绿化带,慢行空间与机动车空间的比例将为2.96∶1,远远高于现状的0.87∶1。
4 设计方案初步评估
4.1 指标选择
从交通运营状态、资源环境影响、社会经济效益以及人的驾乘和出行感受4 个方面,选取9 个可以量化的评估指标构建城市道路空间综合评估体系。见图4。

图4 评估指标体系
4.2 预测评估
以2050 年为基准年,选择如下3 种交通环境进行仿真模拟,结果见表8。
1)方案一:城市道路机动车辆未发生太大改变,仍沿用现状,使用有人驾驶的车辆出行。
2)方案二:无人驾驶车辆比例达到95%,但是城市道路保持现状。

表8 各方案模拟运行结果
3)方案三:无人驾驶车辆比例达到95%,同时城市道路调整为适合无人驾驶车辆的断面形式。
由表8 可知:在运行效率方面,方案二比较优秀,道路饱和度最小,出行用时最低,方案三的交叉口运行效率最高;资源环境评估方面,方案二和方案三在能源利用和污染防治上更有优势,但方案三的空间占有率最小,更有利于用地资源的节约;经济评估方面,方案二投资成本和安全成本最小,较方案一、方案三有优势;在驾乘体验上,方案一的驾乘期望值最低。初步判断,方案二、方案三较方案一具有优势。
为更合理科学判断3 个方案的优劣,本文采用投影寻踪原理[7],利用Matlab 程序,运算500 次优化得到最优投影方向向量αx=(-0.341 3,-0.369 3,0.341 2,-0.286 7,-0.235 4,-0.465 2,-0.267 8,0.317 3,0.323 0),各评估指标权重及评估计算见表9。

表9 投影寻踪法评估方案的计算
由表9可知,方案评分从优到劣依次为方案三、方案二、方案一。这一排列顺序与可预期的实施效果相符合。
5 结论与建议
1)相同道路条件下,无人驾驶车辆可显著缩短车头间距,减小车道宽度,无人驾驶车辆的道路通行能力是有人驾驶车辆的2.17倍。
2)通过实例分析研究,在充分满足机动车通行需求的前提下,无人驾驶将减少55%的机动车通行空间,增加2.5 倍的行人空间,人行空间(25 m)大于车行空间(13.5 m),城市活动空间显著增加。
3)基于交通仿真模拟和投影寻踪原理的城市交通空间评估体系表明,无人驾驶技术及其断面设计,相较现阶段的有人驾驶和断面设计具有显著优势,可改变目前以车为主的道路模式转为以人为本的城市交通空间,实现交通效率与通行体验的双赢。
4)初步研究结果表明,优化调整的城市交通空间可以更高效地适应未来无人驾驶车辆规模化应用的新型交通特征,尽早研究与无人驾驶相适应的城市交通空间体系,是引导城市可持续发展的重要基础与前提。
基于本文的探索,可开展更加深入、广泛的交通空间优化可行方案研究,选择示范区进行应用,形成一套可复制、可推广的基于无人驾驶环境的城市道路空间调整体系标准,为国内更多城市提供参考。
