凸形竖曲线路段识别视距研究
2020-11-12陈卓
陈 卓
(天津市市政工程设计研究院长沙分院,湖南 长沙 410008)
随着交通运输事业的发展,新建高速公路与已建高速公路的对接、已建高速公路新增落地互通的情况屡见不鲜;因此,对新增互通式立体交叉位置与现状平纵面指标结合的研究就显得至关重要。JTG/TD 21—2014《公路立体交叉设计细则》对互通式立体交叉范围内的主线竖曲线最小半径提出了一般值与极限值的范围并在附注中对在分流鼻端前识别视距控制路段的凸形竖曲线半径进行了单独说明。JTGD 20—2017《公路路线设计规范》中对于各级公路的互通式立体交叉、服务区、停车区、客运汽车停靠站等各类出口路段的识别视距也提出重点、明确的要求。
规范中仅对竖曲线半径的使用范围、识别视距要求进行了数据明确,但如何计算、如何针对现状高速公路的复杂情况进行灵活运用则成为了设计中必需面对和思考的问题之一。
1 规范的相关要求与分析
1.1 行车视距
为了行车安全,驾驶人员应能随时看到汽车前面相当远的一段路程,一旦发现前方路面上有障碍物或迎面来车,能及时采取措施,避免相撞,这一必须的最短距离称为行车视距[1]。
行车视距是否充分,直接关系到行车安全与效率,是道路使用质量的重要指标之一。在道路平面上的暗弯(处于挖方路段的弯道和内侧有障碍物的弯道)、纵断面上的凸形竖曲线以及下穿式立体交叉的凹形竖曲线上都有可能存在视距不足的问题。
根据驾驶员发现障碍物或迎面来车采取措施的不同,行车视距可分为:停车视距、会车视距、错车视距、超车视距及识别视距。
1.2 识别视距
在JTGD 20—2006《公路路线设计规范》中仅对停车视距、超车视距等做出了相关要求,没有涉及识别视距;但在2008年编制的《公路路线设计细则》(总校稿)中提出在互通式立交出、入口等行车条件复杂区域内,宜满足判断识别视距;但由于总校稿最终没有颁布,因此识别视距的概念并没有在设计行业中广泛传播。
JTG/TD 21—2014 在表5.5.3 的附注中说明:在分流鼻端前识别视距控制路段,主线凸形竖曲线最小半径取表中括号内的值。识别视距再次正式出现在现行规范规程中。直到JTGD 20—2017 将识别视距(7.9.5条)作为单独的一条予以明确,同时额外说明。
1.3 现行规范的取值情况
JTGD 20—2017 特别强调:各级公路的互通式立体交叉、服务区、停车区、客运汽车停靠站等各类出口路段应满足识别视距要求并应符合相关规定,当受地形、地质等条件限制路段,识别视距可采用1.25 倍的停车视距,同时应进行必要的限速控制和管理措施。见表1。

表1 规范中的识别视距标准
JTGD 20—2017在规定识别视距标准时并没有给出对竖曲线的要求,而JTG/TD 21—2014 则直接给出了竖曲线最小半径的一般值与极限值,见表2。

表2 互通范围内主线竖曲线最小半径
JTG/TD 21—2014 在对应的条文说明中:考虑到在互通式立体交叉范围内,由于运行条件复杂且变化频繁需有比其他路段更大的视距要求,对于分流鼻端前识别视距范围内的凸形竖曲线最小半径按识别视距计算确定,识别视距取停车视距的1.25 倍,物高取值为0。
通过对两个规范的要求及条文说明分析可以得出,当考量互通式立体交叉范围内的主线指标时,若按JTG/TD 21—2014 中的指标要求设计并不一定能够满足识别视距的要求;为保证设计的安全,针对项目的具体情况,应通过具体计算来验证设计方案。
2 凸形竖曲线路段识别视距的计算
当小客车行驶在公路上时,竖曲线半径的大小将直接影响驾驶员行驶过程中视线距离;当行驶在直线上时,可以认为主线的竖曲线半径为无穷大,因此视距也可认为是无穷大,此种情况下不存在识别视距不足的情况;当行驶在凹形竖曲线段时,除夜间行车时前灯照明照射距离有限及通过主线下穿桥梁时存在行车视距的问题外,其余情况下同样不存在识别视距不足的情况;而对于凸形竖曲线则相对复杂一些,分3种情况。
1)直线配凸形竖曲线段。当互通式立体交叉分流鼻端位于凸形竖曲线上坡的进口附近时,小客车驾驶员在直线段能否看到分流鼻端的位置模型见图1。

图1 直线配凸形竖曲线段
通过图1可以得到平面几何关系

H取高出路面1.2 m,识别视距的物高取0(路面标线的高度),将H=1.2 m代入后可简化为

将R、D分别代入式(1)便可对识别视距S是否满足规范要求作出判断。反之,通过识别视距也可以反推出合适的凸形竖曲线半径。
以主线设计速度120 km/h的识别视距为基准,对小客车位于不同距离的凸形竖曲线半径进行推算,见表3。

表3 竖曲线半径推算 m
由表2可知,当主线设计速度为120 km/h时,规范要求最小竖曲线半径一般值为45 000 m,极限值为23 000 m,但通过表3 可以发现:当小客车在直线上的距离>259 m 时,凸形竖曲线半径小于极限值时仍可满足识别视距的要求;当小客车在直线上的距离>120 m 时,凸形竖曲线半径小于一般值时仍可满足识别视距的要求。
2)凸形竖曲线段。当互通式立体交叉分流鼻端位于凸形竖曲线上时,小客车驾驶员能看到分流鼻端位置的半径竖曲线模型见图2。

图2 完全位于凸形竖曲线段
通过图2可以得到平面几何关系

将H=1.2 m代入后可简化为
通过式(2)可知,不同的竖曲线半径对应唯一的识别视距长度。根据表1计算出与之对应的竖曲线半径值。见表4。
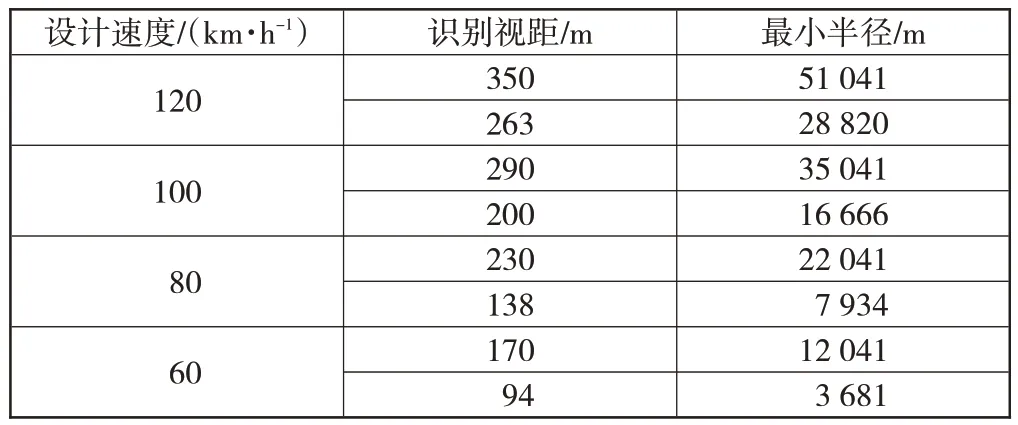
表4 主线竖曲线最小半径计算值
与表2对应的主线竖曲线最小半径范围进行比对可以发现:当采用JTGD 20—2017 表7.9.5 识别视距值进行设计时,凸形竖曲线半径取值要远大于JTG/TD 21—2014 表5.5.3 互通式立体交叉范围内主线竖曲线最小半径的推荐值。因此,建议具体设计时根据实际情况重新核算为宜。
当采用1.25 倍停车视距作为识别视距进行设计时,凸形竖曲线半径取值则可按JTG/TD 21—2014 表5.5.3凸形竖曲线的极限值作为设计参考值。
3)凸形竖曲线配直线段。当互通式立体交叉分流鼻端位于凸形竖曲线下坡段的出口附近时,小客车驾驶员在直线段能否看到分流鼻端的位置模型见图3。

图3 竖曲线配直线段
通过图3 可以发现:当分流鼻端出口还在凸形竖曲线上时,适用图2的计算公式;当分流鼻端出口位于直线上时,则只需满足h<H的条件即可实现符合规范要求的识别视距。当竖曲线长度时,识别视距即可满足设计需求。
3 工程实例
湖南省某已建成高速公路,设计速度为120 km/h,由于地方经济发展需增设一落地互通。
互通起点端分流鼻端位置位于R=17 100(m)的凸形竖曲线范围内,小于规范规定的极限最小半径23 000 m,该竖曲线终点桩号为K1603+313.674;互通渐变段起点桩号为K1603+051.105,渐变段长100 m,减速车道长145.014 m,分流鼻端出口桩号为K1603+296.47;互通终点端受一学校控制,学校桩号范围为K1603+900~K1604+200,互 通 叉 心 桩 号 K1603+652.378,因此互通位置实际可移动的范围在247.622 m以内。根据现状情况需对识别视距是否满足规范要求进行检验,此种情况属于本文所述的凸形竖曲线配直线段情况。
首先计算完全位于凸形竖曲线范围内时R=17 100(m)的实际视距长度通过将互通整体移位,分流鼻端出口位置调整为K1603+612.608,距离竖曲线终点D=298.934(m),识别视距进入凸形竖曲线范围L=350-298.934=51.066(m)<202.6 m,满足JTGD 20—2017中设计速度为120 km/h时识别视距350 m(460 m)的要求。
4 结论
1)对于直线配凸形竖曲线段和凸形竖曲线配直线段的情况,即使凸形竖曲线半径不满足规范要求的最小竖曲线半径,仍可以运用识别视距的有效长度灵活选择互通分流鼻端出口位置。
2)对于凸形竖曲线段的情况则在采用规范提供的互通式立体交叉范围内主线竖曲线最小半径的情况下,仍需对识别视距进行校核,以免造成分流鼻端前识别视距控制路段不满足规范情况的发生。
