基于铱星的南极高空气球测控系统设计及实现
2020-09-26黄宛宁赵志恒张泰华
黄宛宁,赵志恒,郝 勇,张泰华
(1.中国科学院空天信息创新研究院,北京 100094; 2.中国科学院大学 电子电气与通信工程学院,北京 100094)
0 引言
南极地区因为其独特的地理位置,具有极昼和极地涡旋的特殊气候条件。在极昼期开展高空科学气球飞行,避免了昼夜温度交变带来的高度变化和浮力损失,使用零压气球就可实现定高飞行;而极地涡旋是指在极地上空某些高度存在的持续气流环流,风向稳定在纬向,高空气球可利用极地涡旋长时间环绕南极洲飞行,既可以对地观测冰面特征,研究南极物质平衡变化,又可以对天进行空间科学的天文观测,为空间天文卫星的发展积累数据和进行技术迭代。
NASA在南极麦克默多站开展了三十多年的高空气球发放活动[1],在空间科学研究领域取得了丰硕的成果,并且保持了每年3~4次的南极高空气球发放频率,很多大型空间科学计划均采用了南极高空气球飞行进行前期验证;日本昭和站也有多次高空气球飞行试验记录。我国尚未在南极开展高空气球发放活动。在国内第38次南极科考活动中,中科院空天院有望依托国家重点研发计划的“三极环境与气候变化重大科学问题预研究”需求,首次开展南极高空气球发放的尝试,通过高空气球携带的对地观测相机,拍摄南极的冰盖/冰架/海冰等的冰面特征,如冰面融池或冰裂隙等,验证星基平台获取的冰盖/冰架/冰川、海冰等南极关键环境要素产品,为揭示南极物质平衡变化、海-陆-气相互作用过程及对海平面上升的影响等研究提供平流层长航时观测数据。
由于是首次在南极开展高空气球试验,缺乏南极高空气球回收的经验,首先考虑的是载荷数据的实时回传,不考虑吊舱落地之后回收数据的方案,南极地区尚未建设大型的固定地面测控接收站,目前我国的四个南极科考站相距较远,而且分布不均,保障条件也有较大差别,无法保障整个高空球飞行过程中的数据回传,所以首要考虑卫星通信手段,下面对卫星通信的需求进行分析。
1 南极地区卫星通信手段调研
为了追寻极涡存在的高度和纬度范围,观察时空演变规律,为南极大气环流提供原位观测数据,为后续大型南极科考高空气球试验积累数据,本次飞行试验的另一个科学目标就是选取适合的发放纬度和平飞高度,利用大气环流尽可能实现1圈以上的绕极飞行,通过长时间的对地观测,获取大量有效数据。
项目组根据2018~2019年选取的三天ECMWF再分析风场数据,模拟出了这三天发放高空气球的飞行轨迹(如图1上图所示),其中平飞高度设计在35 km,可以看到2018年12月15日和2019年1月1日这两次都实现了1圈以上的绕极飞行,可以看到飞行轨迹的最南边已经进入了南纬80度以内,所以对本次高空气球试验提出的基本数传需求为能够提供南纬80度以内极圈的卫星通信覆盖。NASA在2004年开展的CREAM项目是一次典型的绕极飞行试验(图1下),一共飞行3圈,最终飞行轨迹达到了南纬85度左右。
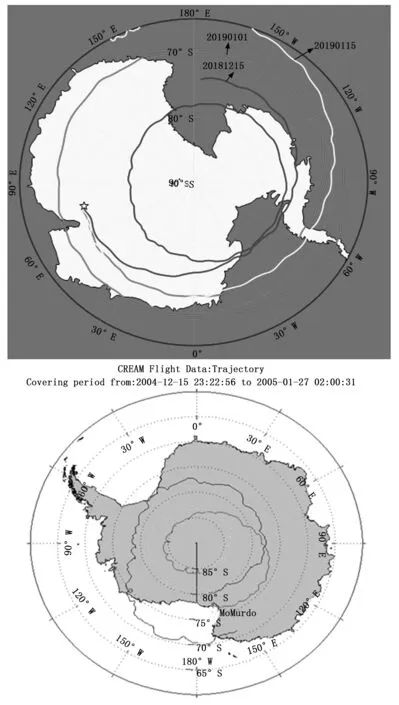
图1 典型绕极飞行轨迹
根据此需求,项目组对国内外主要的移动卫星通信系统进行了调研,结果如表1所示。

表1 主流通信卫星系统能力对比
从表1看出,有可能满足南极飞行的卫星通信手段为铱星,海事卫星和TDRS中继卫星。
从图2可以看出,海事卫星通信系统最大覆盖范围为南纬73度左右。上图为典型的地球同步轨道通信卫星的波束覆盖示意图,由于地球曲率的影响,一般无法覆盖到两极的高纬度地区,即使宽带通信卫星能够覆盖到,也因为仰角过低,需要配备高增益的大型地面天线[2]。这样的设施可以用于南极永久科考站的通信保障,但对于高空气球飞行来说,显然无法承受过重的载荷。日本科考队员在南极昭和站使用海事卫星进行测控通信[2],但当时使用的速率仅为9.6 kbps,而且由于昭和站纬度较低(不到南纬70度),并不能表明海事卫星在南纬80度区域也可以正常使用。NASA多次在南极麦克默多站发放[1],铱星短报文/语音通信设备,以及pilot终端为测控系统的标准配置,有一些飞行试验安装了TDRS中继卫星通信终端。我国自主的中继通信卫星为天链一号,目前主要目标是为了支撑航天任务,尚不能对高纬度极地地区提供通信服务。

图2 海事卫星第四代L波段覆盖图
综合以上需求和调研信息,选用铱星9602短报文通信终端作为测控通信信道,选用铱星的pilot终端作为数据传输的主要通道[3-4]。
铱星9602短报文终端模块重量30克,平均功率1.0 W,运行温度 -40℃~+85℃;采用间隔短电文形式传送双向数据,电文长度270~340 bytes,平均时延1分钟,(10~180 S不等),收发频率1 610.0~1 626.5 MHz(分时),价格低廉,性能适中。
铱星 Pilot 终端是铱星全球宽带的通讯终端,性能稳定可靠,可提供宽带数据和高质量语音,包括南北极全球覆盖;数据速率最高可达双向134 kbps,唯一的缺点是天线尺寸较大,且重量达到了12.5 kg,但对于高空气球飞行系统尚可接受。
图3 铱星pilot终端
2 总体方案设计
根据通信设备的接口特点和传输要求,总体方案设计如下。
球载测控与数传方案如图4所示,主控处理器主要负责GNSS定位信息的接收和遥测数据发送以及执行切割器切割指令,遥测遥控的数据通道主要是通过铱星的9602模块,以短报文的方式传输。考虑到定位信息每帧的数据量很少(GPGGA每帧数据为74字节左右),可以利用铱星pilot终端的网络通道做一路备用的遥测遥控传输。使用串口转网络设备,将主控处理器与工业交换机相连,通过铱星pilot终端连接上网,主控处理器就可以通过udp协议与地面端软件进行通信了[5]。

图4 系统总体方案

图5 使用9602的点对点通信测控信道
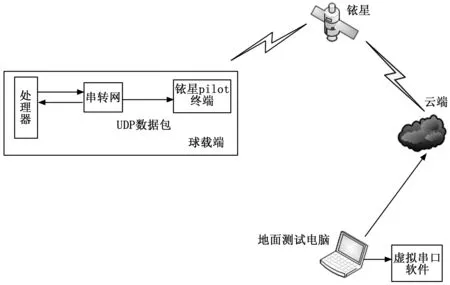
图6 使用pilot终端基于IP的测控信道
高空气球搭载的有效载荷采用C/S架构工作,在气球端设计为服务器,直接与铱星pilot终端连接,地面远程控制端软件为客户端,需要通过公网远程连接上气球端载荷服务器。铱星pilot终端可以提供静态公网IP,通过端口映射到达载荷的端口,但铱星pilot终端的连接有一个约束条件,必须是白名单之内的IP地址才能够跟铱星终端上的设备监理连接。所以地面控制端需要有一个公网IP,加入到铱星pilot终端的白名单中。通过租用云服务器,得到公网IP,把地面控制软件安装在云服务器上,然后使用任何一台可以上网的电脑,远程登录云服务器桌面,打开地面控制软件,就可以完成跟铱星pilot终端连接。建立连接完成后,可以进行载荷相机的操作,软件设计采用的是指令触发拍照,单幅图像传输的模式。使用云服务器获得公网IP的方案有两个优点:1)实现非常方便,成本较低,无需租用宽带专线;2)方便多人协作,不同地点均可登陆,适合外场飞行试验测试及监控[6]。

图7 载荷相机数据传输方案
3 硬件选型
3.1 电路主要硬件选型
主控制器选用STM32F103RCT6芯片,该芯片为32位基于ARM核心的微控制器,具有丰富的通信接口,包括USB、CAN、定时器、ADC等,本设计中主要用到3路UART和1路IO输出,芯片封装为LQFP64,具有256 kflash,温度范围-40~85℃。
GNSS接收模块选用ublox MAX-8C,灵敏度高达-166 dBm,经济高效,低功耗,具有卓越的防欺骗和抗干扰性能,支持高度信息为50 km,可以满足35 km高空气球飞行需求。
3.2 串口服务器
串口服务器选用有人公司的USR-N510,实现RS232/485/422转以太网双向透传功能,它最大的优点是不但可以把串口数据转换为局域网的IP地址,通过TCP或者UDP协议发送,还可以通过有人云服务器中转,实现与公网上远端设备的数据交互。 本设计中采用UDP模式,串口服务器将串口设备的数据UDP发送给指定的IP网络设备,串口服务器同时监听端口,将所有接收的数据转发给串口设备[7]。
3.3 相机选型
根据对地观测的科学需求,要想看清楚冰面融池或冰裂隙,至少需要达到2 m@35 km的分辨率。考虑到有效载荷重量限制和成本,无需追求过高的分辨率,接口需求为IP网络接口,支持TCP/UDP传输,综合以上因素,选用相机参数如下。
像元数量:4 000(H)*3 000(V)
像元分辨率:0.33~10 m@35 km
视频输出:H.264
视频帧频:1~25 fps
图片格式:JPEG
抓图周期:指令触发,不小于1 s
图片大小:压缩后不大于3 MB
4 球载软件流程
软件流程图如图8所示。处理器上电之后首先初始化串口和IO管脚,设置串口波特率为9 600 bps,等待接收串口1数据,接收一组完整的GPGGA语句。接收完毕后,并打开定时器1开始计时。将接收到的GPGGA定位信息通过AT+SBDWB指令写入到9602终端,写入成功后,发送信号查询指令AT+CSQ,如果获取的信号状态信息大于1,说明信号尚可,可以发送,否则就循环等待信号变好。如果信号尚可,使用AT+SBDIX指令发送上星,则GPS定位信息的采集和发送工作已经完成。在本循环周期的余下部分可以查询接收指令,如果收到指令则执行相应的动作。定时器1的溢出时间为28秒,定时器满则本次循环周期结束,执行下一次循环。每次程序循环周期约为30秒。[8]

图8 串口2数据发送软件流程图

图9 串口1或3数据接收中断处理流程
注意AT+SBWB指令为发送二进制数据指令,需要在写入SBD终端的时候,在发送数据最后加上所写入数据的两字节校验和。
异步串行通信接口都是以字节为单位进行通信的,也就是说每收到一个字节就会引发接收完成中断,对于无线链路而言,很有可能出现信号质量不佳造成数据个别丢失的情况,对指令帧头帧尾的判别带来麻烦,所以在指令格式判别上必须谨慎设计。图6所示的方法额外使用了一个定时器作为每帧结束的判别,如果隔固定时间(间隔大小根据波特率不同调整)没有收到数据,则认为该帧传输完毕,开始判别该帧的有效性。我们传输的定位帧均是以GPGGA为起始,结尾为*hh,其中hh表示“”和“*”之间所有字符的按位异或值,如果帧头和帧尾均正确,则认为这是一个有效定位帧,可以下传,否则将丢弃,循环等待,直到获取一个正确的定位帧。
使用铱星pilot终端进行遥测遥控数据通信时需要注意,因为数据传输也通过此通道传输,为了避免冲突造成数据丢失,可采用与载荷一样的查询模式。可通过地面软件发送上行指令查询帧,处理器收到查询帧后通过串口3下传定位信息。
5 通信测试
系统集成完毕之后,首先在北京开展通信测试。其中铱星pilot终端对测试环境要求较高,必须四周环境无遮挡才能达到较高的通信速率。首先确定铱星pilot终端状态指示灯正常,信号强度满格[9]。
一般情况下测试网络的极限速度可以在两端运行iperf工具,但考虑到高空气球球载端没有PC机,而且无人值守,所以采用了NetGraph来统计网卡端的网速和流量, NetGraph[10]提供了过去一小时的平均速率柱图显示。

图10 NetGraph统计平均网速柱图
持续测试了5分钟时间,可以看到平均速率在15 kB/s以上,即120 kbps,符合预期,最大的平均值超过20 kB/s。
使用GPS星座模拟器模拟气球球体运动轨迹变化,在室内输出GPS模拟信号,测试地面监控软件结果如图11所示,上行指令均可以正常执行。

图11 地面监控软件测试图
图12为使用铱星pilot终端传输的载荷相机图片,格式为JPG,大小为1.73 MB,传输时间约为16秒。经多次传输测试,铱星pilot传输图片速率稳定在115~120 kbps之间。

图12 传输图像测试
6 结束语
文章根据第38次南极科考高空气球飞行试验的需求,设计了用于南极科考高空气球系统的测控系统,采用了铱星短报文和IP数据的通信形式,实现了双路冗余测控和100 kbps量级的载荷数据传输,在内陆的数据传输试验达到了预期指标,考虑到南极的恶劣气候条件,下一步需对系统进行环境适应性改造及测试,在内陆开展一次模拟飞行测试,以确保技术状态可以可靠支撑第38次南极科考高空气球飞行试验。
