基于Rodrigues参数交互模型航天器相对位姿测量技术
2020-09-26田九玲杨永菊
田九玲,杨永菊
(1.河南工业职业技术学院,河南 南阳 473000;2.河南理工大学 测绘学院,河南 焦作 454003)
0 引言
近年来,我国在人工智能技术、机器人制造方面发展卓越,航天器研究方法越来越多,航天领域的发展水平代表着一个国家的科研技术水平,目前我国对航天器相对位姿测量研究越来越多,航天器的相对位姿测量结果对于航天器的运行和一些实验结果有着十分重要的影响,即使相差一毫米,都会对航天器运行结果造成严重影响,所以加强对航天器相对位姿测量研究,减少误差,增加航天器相对位姿测量的实时性和精度是当前研究的重要问题[1]。传统的航天器相对位姿测量方法是视觉欧拉角法航天器相对位姿测量法,该方法需要进行大量的三角运算,其中涉及到的其他辅助领域的计算也十分多,如果其中一个步骤的数据出现偏差,整个测量结果就会出现误差,所以它计算量大并且测量效率不高[2]。为了解决这一问题,本文将研究基于Rodrigues参数交互模型航天器的相对位姿测量技术。
Rodrigues参数交互模型航天器的相对位姿测量技术首先是利用罗德里格旋转公式和四元数定理建立一个三维空间坐标系,然后在三维空间坐标系中对航天器的角特征和椭圆特征进行提取,最终提取出航天器的相对位姿的特征。根据相对位姿特征进行航天器的相对位姿测量。这种航天器相对位姿测量技术减少许多不必要的计算量,测量过程简便,避免了实验误差的出现,是一种较为方便的航天器相对位姿测量技术。
1 基于Rodrigues参数交互航天器位姿采集模型
基于Rodrigues参数交互方法是基于罗德里格旋转公式为基础的参数交互方法[3]。目前罗德里格旋转公式是计算三维空间中一个向量绕旋转轴旋转给定角度以后得到一个新的向量计算公式,这个公式刚好满足航天器工作时的工作要求,公式使用原向量、旋转轴、原向量和旋转轴的交叉积作为标架表示航天器旋转以后的向量组,增加四元数定理,减少计算航天器旋转向量的计算量[4]。
罗德里格旋转公式如下所示:
Rodrigues参数g=[g1;g2;g3]
T定义为g=tan(θ/2)n(1)
(1)
公式中n=[n1;n2;n3],T、θ分别为Euler轴上的单位矢量和绕n的旋转角[5]。
观察罗德里格旋转公式参数的定义可以看出,当θ趋近于π时,g的模也就无线趋近于无穷大[6]。由于航天器的向量定义十分多,罗德里格旋转公式的计算量十分大,所以本文加入四元数由于四元数q,对罗德里格旋转参数g进行重新定义。这个时候计算输入任何向量,都会输出无限大的结果,不能进行向量换算[7]。所以本文在此基础上进行优化的罗德里格旋转参数计算方法。
设航天器本体坐标系相对于参考坐标系r(0)的罗德里格旋转参数为g(0),将参考坐标系r(0)绕其第i(i= 1,2,3)个坐标轴旋转π,得到的坐标系称为参考坐标系r(i),本本文的坐标系相对于旋转后参考坐标系r(i)的罗德里格旋转参数记为g(i),则g(i)为:
g(0)=[q1/q4q2/q4q3/q4]T
g(1)=[-q4/q1q3/q1 -q2/q1]T
g(2)=[-q3/q2-q4/q2q1/q2]T
g(3)=[q2/q3-q1/q3-q4/q3]T
(2)
由定义q21+q22+q23+q24= 1可知道q1、q2、q3、q4四个向量不会同时为零,g(0)、g(1)、g(2)和g(3)的模就不会同时为无穷大,不会出现交互航天器输出向量都为无穷大[8]。因此在一个给定时刻就可以利用g(0)、g(1)、g(2)和g(3)中远离奇异点的那一个向量来描述交互航天器的相对位姿[9]。
基于罗德里格旋转参数公式是通过左右摄像机采集三维空间内的航天器信息,通过观察三维空间内的坐标系间的向量变化曲线规律,测量出交互模型的航天器相对位姿。基于罗德里格旋转参数交互模型的左右摄像机系统是安装在航天器外部,由两台测量摄像机和三维图像采集器组成,三维图像采集器把摄像机测量的结果发送到地面计算中[10]。其结构简易、耗能小,具体模型简化为三维空间坐标系如图1所示。

图1 基于罗德里格旋转参数交互模型结构图
图1中的航天器的三角坐标系O0-X0Y0Z0、空间节点坐标系OP-XPYPZP、采集器坐标系OL-XLYLZL和OR-XRYRZR、抓捕目标坐标系OL-xLyL以及OR-xRyR和测量坐标系OM-XMYMZM[11]。三维空间的向量在左右两个摄像机上成像,像点为pL和pR,每个摄像机的镜头光学中心OL和OR和像可以确定一条射线,两条射线的交点就是被测量的航天器的相对位姿空间点[12]。
假设左采集器三角坐标系OL-XLYLZL为测量坐标系,右机坐标系OR-XRYRZR,fL、fR分别表示左、右太空摄像机的有效焦距。航天器的测量坐标系空间关系本文利用旋转矩阵R和平移矩阵T表示,左、右向量的像点坐标分别为(xL,yL) 和(xL,yL),确定航天器p的三维坐标(X,Y,Z) 的相对位姿[13]。
其中R、T矩阵表示的是罗德里格旋转参数交互模型的外部向量变化情况,通过两个矩阵的实时变化,科研人员可以观察航天器附近是否有不明物体,如果两个矩阵发生不规则变化,科研人员就会对航天器附近进行勘察,防止航天器受到破坏[14]。
根据航天器的三维坐标(X,Y,Z) 的相对位姿表示公式可以得出,罗德里格旋转参数模型与航天器的距离H和地面接收到的航天器相位位姿的误差成反比,关系图如图2所示。
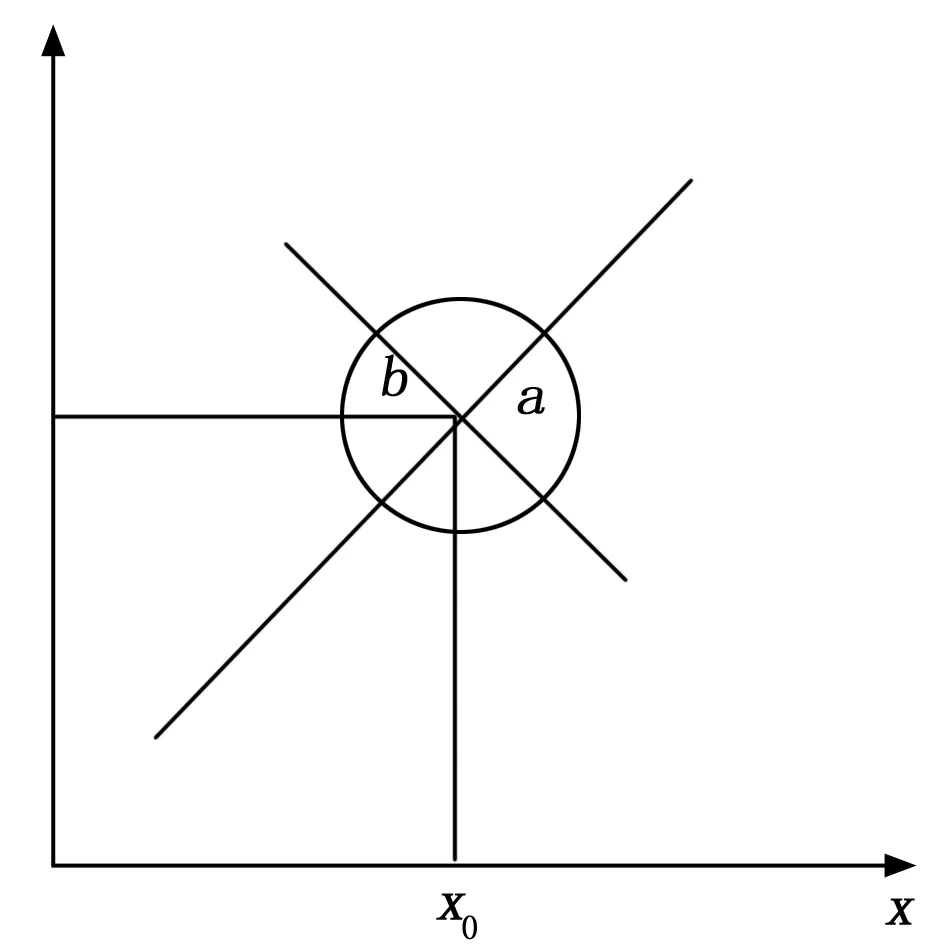
图2 距离H和相对位姿的误差图
细小的距离会对航天器的相对位姿有很大的影响,所以控制好罗德里格旋转参数模型与航天器的距离是航天器相对位姿准确测量的关键[15]。
2 航天器相对位姿特征提取
对航天器的相对位姿测量,其中最重要的是分析航天器的模型特征,常见的航天器模型如图3所示。

图3 航天器模型
近年来我国研究发明的航天器通常是由航天器附属卫星、太阳能帆板、发动机喷嘴和星箭对接圆环与地面计算机的通信天线组成[16]。航天器附属卫星多是以有规则的圆柱体、长方体、正方体为主,避免出现观察不到的死角问题。太阳能帆板的作用是为航天器提供电能,维持航天器的正常工作,太阳能帆板通常为长方形和正方形。为了方便测量航天器的相对位姿,一般将太阳能帆板和航天器附属卫星的形状相同,这样可以提供相同的角点特征。发动机喷嘴和星箭对接环都是圆形装置,其主要作用是稳定航天器的内部运行。航天器的通信天线多是喇叭形状的,由于通信天线在航天器的外部,通信天线是航天器相对位姿测量的关键,所以通信天线外有一层保护膜,防止通信天线发生软化[17]。具体航天器相对位姿特征提取过程如图4所示。
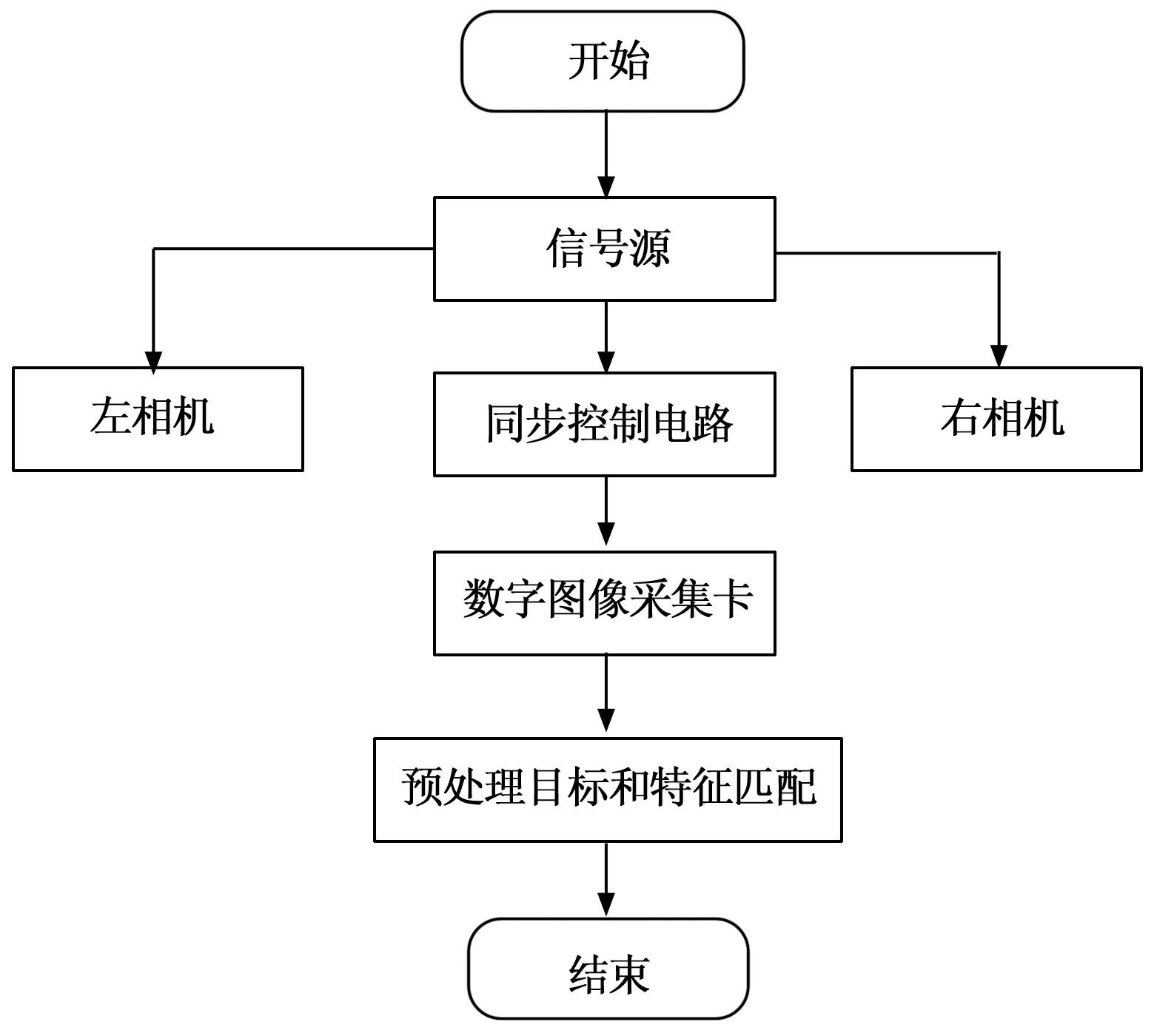
图4 航天器相对位姿特征提取过程图
为了方便航天器的相对位姿的测量,本文选择的航天器附属卫星和太阳能帆板都是圆形。如果进行远距离测量航天器的相对位姿,通过提取太阳能帆板的角点特征,进行相对位姿的测量;如果进行近距离的相对位姿测量,提取航天器对接圆环的特征进行航天器的位姿测量[18]。
太阳能帆板的角点是三维空间中向量变化强弱的点。本文提取角点的特征是通过Harris角点检测方法,计算航天器模拟图像的每个像素和灰度,通过像素和灰度信息进行条件随机场计算[19]。Harris角点检测方法是利用航天器三维坐标系中的图像灰度梯度是不连续的并且每两个灰度梯度都是不相同的现象。由此定义一个函数矩阵M,当航天器处于角点处,那么三维坐标系中的向量的亮度信号就会增加,这时的矩阵的特征值就会很大,那么该检测点就是角点特征处,如果现象相反,就不是特征角点处。建立函数矩阵,根据函数矩阵会计算3种结果,分别为:
1)提取的特征值很小,不是角点处;
2)提取的特征值很大,是角点处;
3)提取的特征值一个大一个小,角点在附近。
部分角点位置图如图5所示。
图5 航天器角点位置图
接下来航天器与地面计算机的对接圆环的特征提取也是航天器相对位姿测量的关键,对接圆环是椭圆形,在本文研究的罗德里格旋转参数三维坐标系中,对接圆环的参数进行计算,得到的接圆环二维坐标系中的示意图如图6所示。
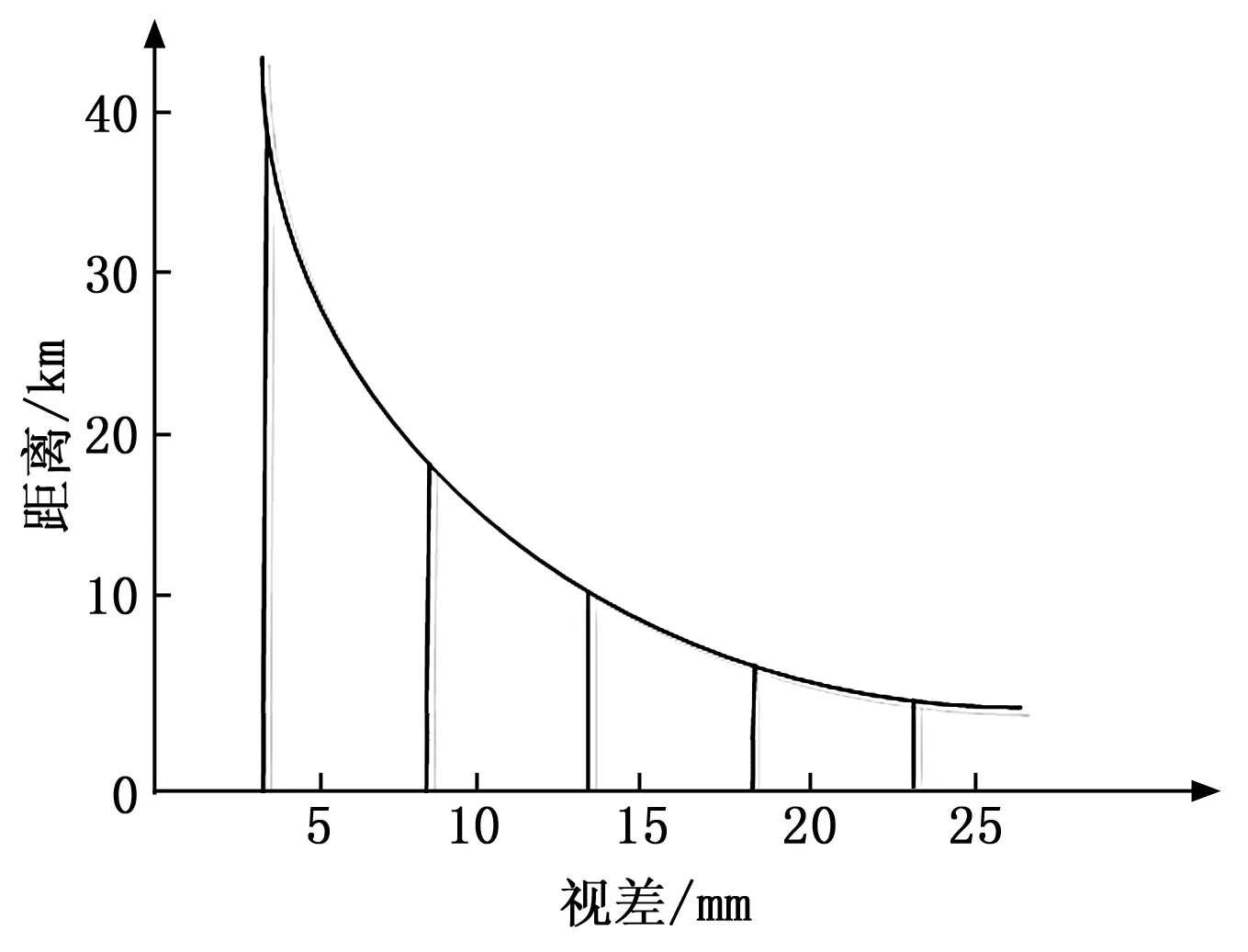
图6 平面中任意椭圆的表示
观察平面中任意的椭圆示意图可以得到椭圆的中心位置(xc,yc),椭圆长半轴和短半轴。根据上文对接圆环的数学方程式,利用正态分布方法,计算出椭圆的最佳中心坐标点,这个坐标点就是对接圆环的特征点。
根据提取接圆环和太阳能帆板的特征,将两个已知特征值带入位姿解算法中求出航天器的位姿特征。因为对接圆环的圆面特征具有对称性,所以本文可以求出航天器对接圆环上的5个位姿信息[20]。它们分别是3个坐标轴相关的位姿、俯角A和方位角。根据极限几何原理,可以求出对接椭圆的极限方程。为了方便提取出椭圆航天器的相对位姿特征,本文将椭圆分为三个部分,即弧顶区、中间区、弧底区。具体平面示意图如图7所示。
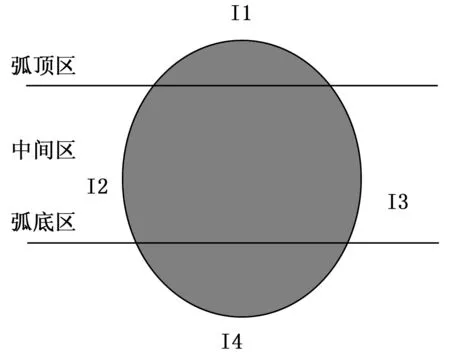
图7 椭圆的分区结构图
在椭圆的3个区域中,分别进行极限方程和相对应区域的约束条件进行匹配。根据三个匹配结果,取出相同特征量。将特征量带入三维数学公式中,得出航天器的相对位姿特征。
3 基于Rodrigues参数交互模型航天器相对位姿测量技术
基于Rodrigues参数交互模型航天器相对位姿测量技术是通过尺度不变特征变换法,将上述提取到的参数特征进行特征重组化,尺度不变特征变换法将提取的角特征和椭圆特征与航天器模型在三维空间坐标系中的向量特征进行初始化匹配,通过在三维坐标系中查找相似的最近临近点和次临近点,进行合理匹配。如果角特征到向量的距离和椭圆特征到向量的距离的比值小于本文设定的参数,那么这个向量就是匹配的特征向量,若比值大于设定的参数,则不是匹配特征向量。为了精确航天器的相对位姿测量,需要匹配至少5个特征向量,具体测量流程图如图8所示。
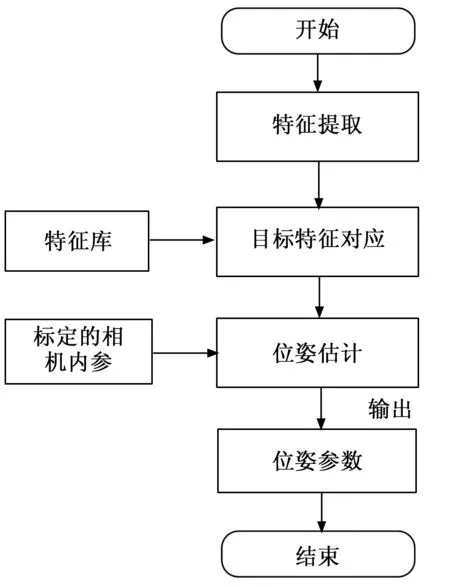
图8 相对位姿测量流程图
1)通过罗德里格旋转公式和四元数建立三维空间坐标系;
2)通过数学公式提取航天器的角特征和椭圆特征;
3)将提取到的椭圆特征和角特征通过尺度不变特征法与航天器在三维空间坐标系的想进行航天器的相对位姿特征匹配;
4)将匹配到的航天器相对位姿特征向量通过Rodrigues参数交互模型航天器的相对位姿测量方法进行测量;
5)记录测量结果,完成相对位姿测量。
4 实验研究
4.1 实验目的
为了验证本文研究的基于Rodrigues参数交互模型航天器相对位姿测量技术比传统的航天器相对位姿测量技术测量效果,进行实验研究。
4.2 实验过程
本文采用的基于Rodrigues参数交互模型的左右摄像机的分辨率为2 048× 2 048像素,像元宽度为7 μm,左右摄像机焦距为200 mm,左右摄像机成像和图像处理过程中带来1个像元的白噪声误差。本文模拟两个相同的航天器为2 m× 2 m× 2 m的一个立方体,其8个顶点中对于摄像机可见的顶点作为特征点。同一时间开始航天器的相对位姿测量,两组共8人记录测量结果。最后根据人工智能AI技术对测量结果的准确性进行评定。
4.3 实验结果分析
通过上文的实验过程,每组测量结果每组由4个科研人员共同记录,最终取平均值,两种方法分为两组,根据记录绘成折现图如图9所示。

图9 两种技术的航天器相对位姿测量结果图
观察传统方法的航天器相对位姿测量结果图和基于Rodrigues参数交互模型的航天器相对位姿测量结果图可以观察到,基于Rodrigues参数交互模型的航天器相对位姿测量技术测量精度可高达99%,并且测量时间短。
观察两种方法的航天相对位姿测量结果图可知,当测量时间为40分钟时,基于Rodrigues参数交互模型航天器的相对位姿测量已经测量完毕,但是传统的位姿测量才进行了一半。因为本文航天器的相对位姿测量技术的核心是航天器特征匹配,测量过程简便,省去了很多计算过程,然而传统的航天器相对位姿测量方法测量步骤很少,但是根据测量结果要进行大量的计算,并且一处计算结果失误,整个航天器的相对位姿测量就是失败的。在实验32分钟时,基于Rodrigues参数交互模型航天器的相对位姿测量方法时,测量精确度得到了大幅度提高,然后传统航天器的相对位姿测量方法的整个过程是一个平缓的曲线,可能在测量过程中出现了意外事故,实验无法进行前进,所以说明了本文方法具有高效性。
综上所述,基于Rodrigues参数交互模型的航天器相对位姿测量技术更加完善,测量结果准确,测量时间短,具有高效性。
5 结束语
本文在传统航天器相对位姿测量技术的基础上,基于Rodrigues参数交互模型研究了一种新的航天器相对位姿测量技术。通过罗德里格旋转公式和四元数定理定义Rodrigues参数交互模型的三维坐标系,继而提取航天器设备的角特征和椭圆特征,根据两个特征的相同特征向量,提取航天器的相对位姿特征,最后根据航天器的相对位姿特征进行相对位姿测量。经过本文实验研究,表明基于Rodrigues参数交互模型航天器相对位姿测量技术测量的精准度比传统技术高出25.88%。
