基于鲁棒H∞控制的多机协同编队
2020-09-23于均杰
王 平,罗 阳,于均杰
(海鹰航空通用装备有限责任公司,北京 100074)
0 引言
近年来,多无人机系统的协同编队控制问题受到广泛关注。多机协同能够充分发挥单机的功能、提高任务的完成率、拓宽使用范围等[1],在民生和军事等领域均具有巨大的应用潜力。编队保持作为协同编队控制方面的基本问题,是编队有效执行任务的基本保障。在协同侦察和协同定位等任务中,由于载荷特性对无人机编队保持和相对位置精度提出了较高的要求。然而,在大气环境中环境风会对编队队形的保持产生很大的干扰,并且相比有人机等大飞机,无人机普遍体型较小、抗风干扰能力差。因此,风干扰情况下提高无人机协同编队的保持精度成为亟待解决的问题。
目前,编队保持和控制的方法主要包括领航-跟随法[2]、虚拟结构法[3]、行为控制法[4]以及一致性控制方法[5-6]。Ren在文献[7]中论证了领航-跟随法、虚拟结构法以及行为控制法都可以归入一致性的统一框架内。现有的无人机编队控制研究主要集中在通信时滞和控制受限等情况下的编队保持问题。针对干扰情况下的无人机编队保持,侯海平等[8]基于领航-跟随法提出了一种高阶滑模编队控制方法,克服了未知干扰的影响;王晓燕等[9]基于领航-跟随法设计了无人机编队鲁棒控制器,克服了模型不确定性与外部干扰的影响;Islam等[10]考虑多无人机系统模型存在的非线性和不确定性,依据邻域位置信号,提出了一种基于分布式一致性的鲁棒自适应控制方法。针对风干扰的情况,Wu等[11]研究了风干扰下长僚机编队的轨迹跟踪控制方法,利用反步法结合干扰观测器实现轨迹跟踪控制;陈侠等[12]针对风干扰下多无人机编队的航迹跟踪问题,提出了一种基于Kalman滤波的一致性跟踪算法;Kukreti等[13]针对风干扰下的轨迹跟踪,提出了一种遗传最优的无人机导航算法;Zhang等[14]针对风干扰下多旋翼无人机的时变编队,设计了一种一致性协议,并通过试验验证了其有效性。
在上述研究的基础上,本文针对环境风干扰情况下无人机编队保持精度差的问题,设计了基于邻居无人机相对状态的编队保持控制协议。通过选取适当的被控输出来量化环境风干扰对固定翼多机编队的影响,将受扰多机编队控制问题转化为鲁棒H∞控制问题。对于僚机之间通信拓扑为有向图和无向图的两种情形,均以线性矩阵不等式的形式给出满足期望H∞干扰抑制指标的多机编队条件,控制参数求解简单。仿真结果表明,该方法能够有效提高多机协同编队的鲁棒性,抑制风干扰对编队保持的影响。
1 编队的通信拓扑
采用拓扑图来表示无人机群之间的通信关系,将每架无人机看作拓扑图中的一个节点,将无人机之间的信息交互看作拓扑图的边。

显然L=D-A。基于长机无邻居这一事实,可将Laplacian矩阵L写成如下分块矩阵的形式

2 无人机编队数学模型
2.1 2个常用坐标系
多无人机编队运动需要以坐标系为参考标准,选取适当的坐标系可以更加方便地描述无人机的运动情况,常用的坐标系有如下两种:
1)大地坐标系
大地坐标系是固定在地球表面的一种坐标系。在地面上任意选取一点作为坐标原点O,Ox轴指向北,Oy轴指向东,Oz轴铅垂向下。
2)航迹坐标系
航迹坐标系是描述无人机编队飞行的基础。选取无人机质心为原点O′,与飞行速度V重合的方向为O′x′轴,与O′x′轴在同一水平平面且垂直于O′x′轴的方向为O′y′轴,O′z′垂直于O′x′y′平面,且满足右手法则。
2.2 队形的几何描述
以正五边形编队为例给出无人机编队的表示方法,如图1所示。假设无人机已组成预期编队,Δi,Δj分别表示第i架无人机和第j架无人机相对于长机的距离差向量,ξ0、ξi、ξj分别为虚拟长机,第i架无人机和第j架无人机的位置,它们之间的关系如下:ξi=ξ0+Δi,ξj=ξ0+Δj。
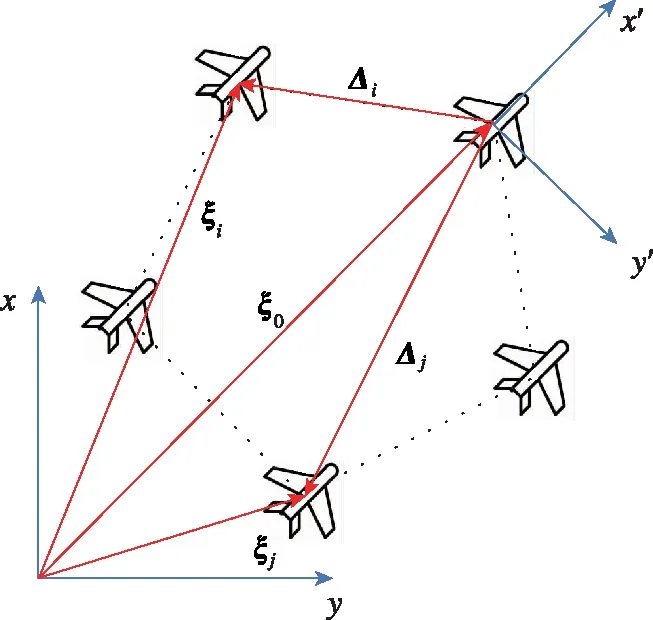
图1 编队的表示方法Fig.1 Formation representation
2.3 无人机动力学模型
假设无人机无侧滑飞行且不受地球曲率影响,编队中第i架无人机的三维质点模型为
(1)
其中,g为重力加速度;Vi、χi、γi分别为无人机i的线速度、航迹倾斜角和航迹方位角;di=[d1i,d2i,d3i]T为无人机i受到的风干扰;a1i、a2i、a3i分别为无人机i的切向加速度、法向加速度的水平分量和法向加速度的垂直分量。
3 无人机编队控制器设计
3.1 模型转化
记ξi=[xi,yi,zi]T为无人机i在三维空间中的惯性位置,ai=[a1i,a2i,a3i]T为控制输入,则
(2)
其中
则系统(2)可以简写为
(3)


3.2 问题转化
本文研究了系统(3)的编队控制问题,即设计了分布式控制协议ui,使得系统中所有无人机形成期望编队。也就是说
(4)
其中,ξi、ζi分别为第i架无人机的位置和速度状态;ξ0、ζ0分别为长机的位置和速度状态;Δi、Rgklead(Δi)k分别表示第i架无人机相对于长机在航迹坐标系和大地坐标系下的位移。
(5)
因此,多无人机系统对风干扰的衰减抑制能力,可由从风干扰ω到被控输出z的闭环传递函数矩阵的H∞范数进行度量,其定义为
(6)

至此,风干扰的无人机系统的编队控制问题就转化为H∞控制问题。
3.3 控制协议设计
为解决上述的H∞控制问题,设计如下无人机编队控制协议
Rgklead(Δj)k)+ai0(ξi-Rgklead(Δi)k-ξ0)]-
(7)
其中,k1,k2>0为待定的反馈增益。

(8)


(9)
3.4 多无人机H∞编队条件

(10)

定理:若控制增益k1、k2满足式(10),并且存在正定矩阵P∈R6N×6N满足

(11)
证明:考虑如下的Lyapunov函数
(12)
其中,P∈R6N×6N是正定矩阵。
首先,在没有外界干扰的情况下,讨论系统(9)的稳定性问题。对V(t)求导可得
(13)

其次,在干扰ω(t)非零情况下,讨论系统(9)的鲁棒H∞性能。与上述稳定性分析类似,得到
(14)
其中
对任意的T>0,考虑下列代价函数

(15)
在零初始条件下,此时V(0)=0,有


(16)
其中,Ψ=Θ+diag{I6N,-γ2I3N}。

对于僚机之间的通信拓扑图为无向图的情形,给出下面的推论。
推论:若控制增益k1、k2满足式(10),并且存在正定矩阵P∈R6×6满足
(17)
4 仿真实例
本节以1架长机和4架僚机组成的正五边形平面编队突遇阵风为例,通过仿真分析,验证所提出的方法。
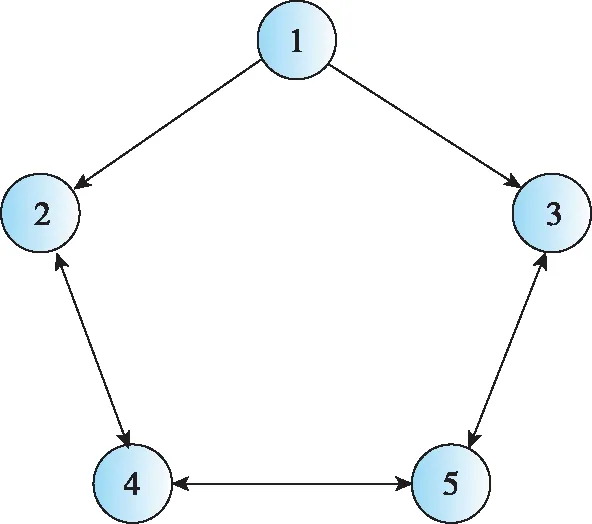
图2 通信拓扑Fig.2 Communication topology
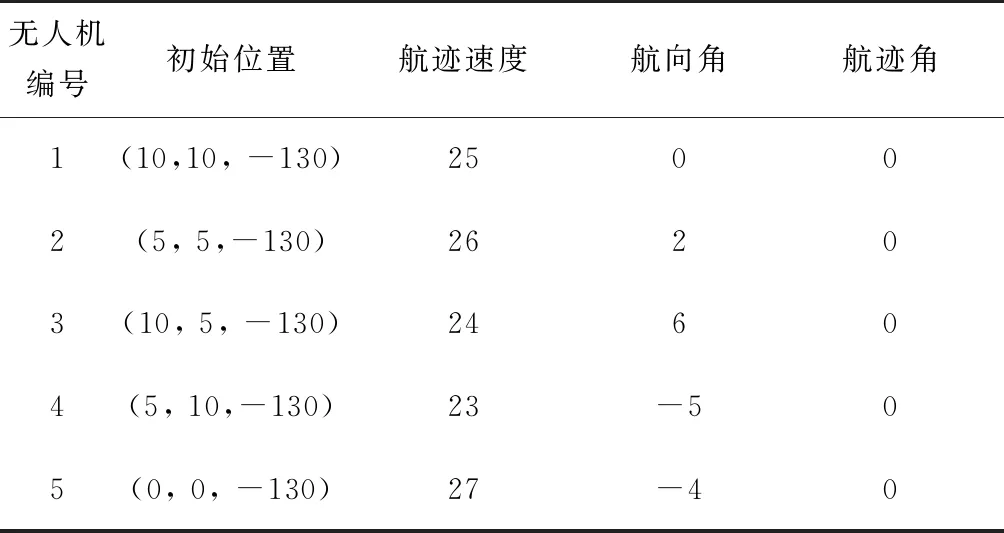
表1 无人机初始状态信息
本文采用三维质点模型,考虑到无人机的实际机动能力,在仿真过程中对控制量a1i、a2i、a3i进行了限幅
a1i∈[-0.5g,g];
a2i∈[-tan(80°)g,tan(80°)g];
a3i∈[-2g,1.5g]
以1号长机为原点,航迹坐标系为参考坐标系,设置2~5号僚机在长机坐标系中的期望相对位置为
仿真步长为0.01s,在100s时施加持续ΔT=5s的阵风干扰模拟对编队的影响,阵风干扰的模型如下
(18)
其中,t∈[0,ΔT)为阵风持续的时间。图 3所示为仿真过程中僚机相对长机的位置变化;图 4、图5和图6分别为X轴、Y轴、Z轴3个方向的相对位置变化在95~150s时间内的局部放大图;图 7所示为t1= 105s,t2=115s,t3=150s这3个时刻所保持的编队队形。

图3 在长机坐标系下的相对位置Fig.3 Relative positions in the leader’s coordinate
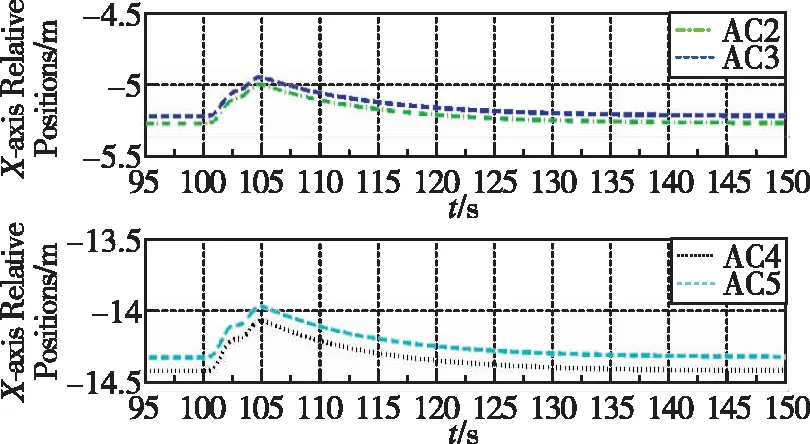
图4 X轴方向相对位置Fig.4 X-axis relative positions

图5 Y轴方向相对位置Fig.5 Y-axis relative positions
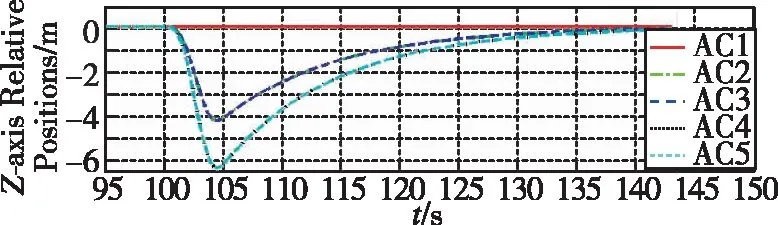
图6 Z轴方向相对位置Fig.6 Z-axis relative positions

图7 编队队形(t1= 105s, t2=115s, t3=150s)Fig.7 Formation patterns(t1= 105s, t2=115s, t3=150s)
5 结论
本文针对环境风干扰情况下无人机编队保持精度差的问题,设计了基于邻居无人机相对状态的编队控制协议。理论分析与仿真结果表明:
1)采用一致性编队控制方法,避免了领航-跟随法缺少队形反馈、不适合大规模编队的问题,扩展性更强;
2)以线性矩阵不等式的形式给出了满足期望抑制指标的多机编队条件,对于僚机之间的通信拓扑图为无向图的情形,仅通过求解2个线性不等式确定控制协议,控制参数求解简单、可离线计算,并且不需要单独设计各通道。
3)本文所提方法能够有效提高多机协同编队的鲁棒性,抑制风干扰对编队保持的影响。
