基于激光扫描技术的大型船舶舱容量计量技术研究
2020-09-10金荣品胡敏捷李志月苏雪龙
金荣品 胡敏捷 李志月 苏雪龙
(上海船舶研究设计院,上海 201203)
1 引 言
对于大型船舶计量舱,传统的容量计量方法是几何测量法,通过全站仪等工具在船舱内部进行数据采集,现场作业完成后建立数学模型,进行拟合计算。大型舱室尺寸较大,内部大型构件遮挡较多,传统的测量方法不仅存在采样点密度不足等问题,而且不能快速获取特征点、关键点数据,造成现场测量时间长等问题。近年来,三维激光扫描技术也日趋完善,精度明显提高,这为解决大型船舱容量计量提供了新的途径[1]。基于激光扫描技术的大型船舱容量计量应用三维激光扫描技术[2],快速采集船舱点云数据,对点云数据进行配准、修补等处理,快速高精度的重建船舱三维模型,对舱室构件进行精细建模,解决大型船舱的快速容量计量问题。本文以泰州新世纪船厂建造的158000吨油轮的右六舱室为例,介绍三维激光扫描技术在大型船舶舱容量计量中的应用,如图2所示。

图1 158000吨油轮右六舱室Fig.1 Right sixth tank of 158000 DWT tanker
2 容量计量
经过调研与资料收集,选择FARO地面三维激光扫描仪作为测量仪器。制定了详细的实施方案,具体操作步骤包括现场空间数据采集、空间数据配准、空间数据空洞修补、构件精细建模、三维重建及容量计算。
2.1 空间数据采集
由于船舱内部存在复杂形状的大尺寸构件,遮挡严重,为了达到对船舱的精确测量,需在船舱内部进行多测站扫描测量,以获取舱室的全面三维数据。经过现场勘探,采用布设靶标球方式扫描的精度较高,节省了现场作业时间,同时为后期数据处理提供便捷。实际工作中,针对船舱和靶标,需采用不同的分辨率进行扫描,首先以低分辨率进行整体扫描,然后选择欲采集区域,按照正常分辨率扫描该区域,最后专门针对靶标以最高分辨率扫描,以提高后期点云配准精度,一站扫描结束后分别保存区域点云文件和靶标的点云文件[3]。如图2所示,舱室内有上中下3层工作平台,在船舱舱底共设2站进行扫描,采集得到点云点数分别为4258万点和4268万点。

图2 舱室初始点云数据Fig.2 Initial point cloud data of tank
2.2 空间数据配准
点云数据配准是点云数据处理的关键过程之一,通过某种变换将两组有重复区域的点云数据对齐并转换到同一坐标系下[4]。由于现场采集使用了靶标球,提取靶标球的靶心作为同名点,根据配准算法将点云数据变换至同一坐标系[5]。图3为数据配准的结果。
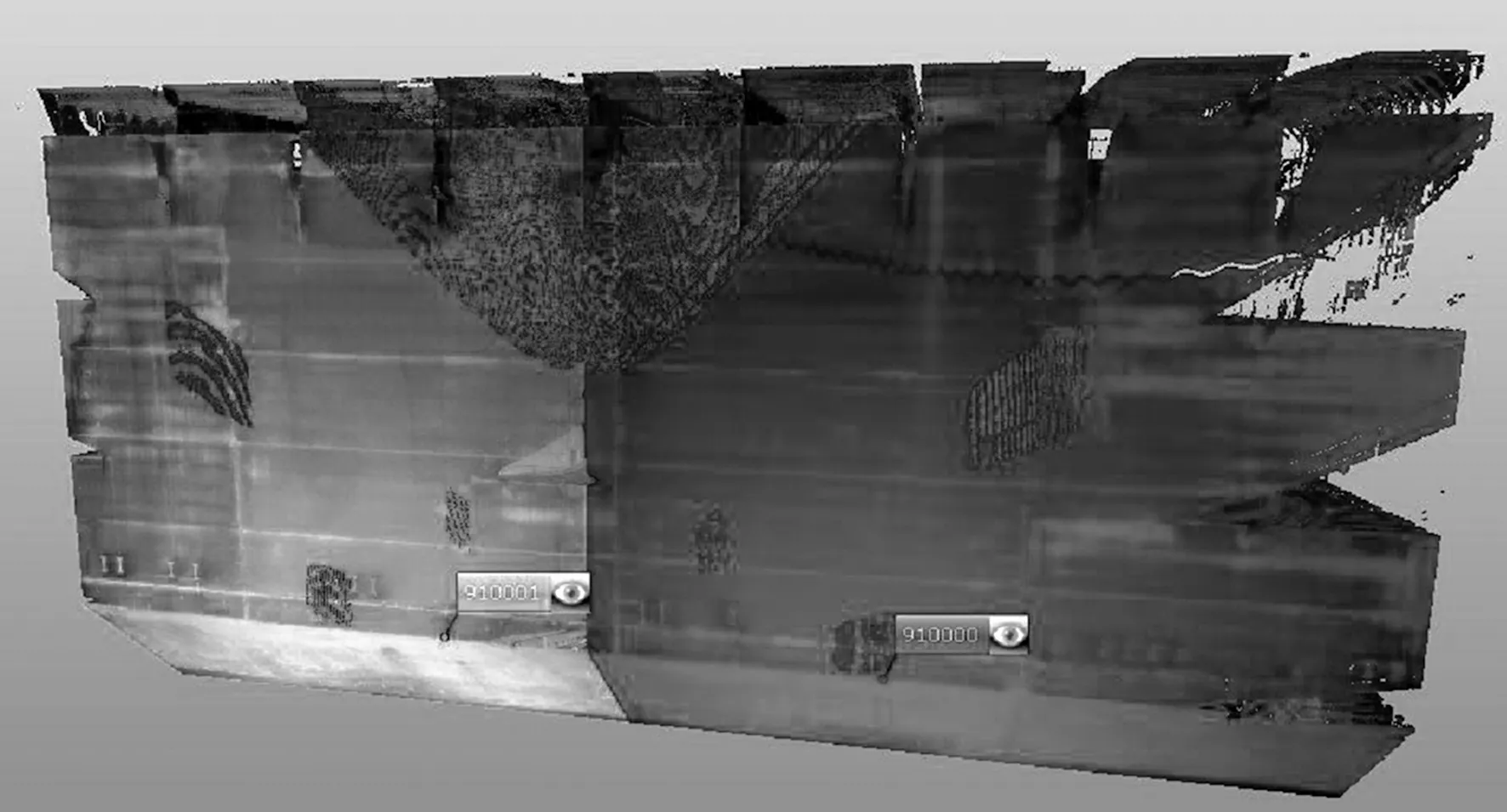
图3 点云配准结果Fig.3 Point cloud registration results
2.3 空间数据空洞修补
在数据处理过程中,会出现点云数据不能够完全覆盖船舱表面数据的情况,产生数据空洞。为了获取完整的点云数据,必须采用一套算法修补数据空洞,重新构建船舱整体形状[6,7]。针对该问题,主要采用基于点云数据局部曲面拟合内插来进行点云数据的空洞修补,以便于后期建模处理。
2.4 构件精细建模
舱室内部存在大量构件,在进行容量计算中需要对复杂构件体积进行扣除。为了实现复杂舱内构件的精细建模,首先分析舱内构件模型类型,建立标准构件模型库,设计模型的参数形式,然后通过识别点云数据并提取对应的特征参数,最后由模型库中的相应模型结合提取的特征参数重建构件模型。首先,借助复杂舱构件三维点云数据,对船舱内构件的种类进行归纳,主要包括如下构件:舱壁纵骨、甲板纵骨、垂直扶强材、直肋板、底部渐变肋板、横梁、水平桁、纵桁、栏杆扶手、竖直扶手架、倾斜爬梯、工作平台、管道、管道支架和加强肘板,共计15种内部构件,并建立构件库。然后通过调用构件库内模型依次进行分区、分层、分对象搭建模型,最终构件模型如下:

图4 船舱构件模型Fig.4 Model of tank construction
2.5 三维重建及容量计算
经过补洞等处理之后的点云数据能够较好地表现舱室的表面形状,对获得的点云数据进行三维重建可以达到良好的可视化效果并满足后期容量计算要求。基于点云数据的特点,通过Delaunay三角剖分区域生长网格,四边形区域划分,转化生成NURBS曲面等三个步骤得到精细三维模型[8]。
舱室的实体模型由舱室内壁以及内部各种构件组成,因此容量的计算方法是计算船舱型容积,再计算各种构件体积,船舱净容积即型容积减去构件体积。经过分析,采取基于三角剖分、三棱锥累加的方法计算容积,即先对舱室边界曲面进行三角剖分,通过曲面上三个顶点与坐标原点相连构成三棱锥,由三棱锥体积的累加得到舱室的体积。对于船舱内部的构件,由于构件均具有标准尺寸和结构,且通过构件库的设计,船舱内的构件都经过参数化设计,因此构件整体体积的计算可以通过构件库的参数对每个构件体积进行计算,然后累加所有构件体积得到整体体积。最终可获得船舱的净容积。
3 测量不确定度分析
3.1 测量模型
由任意封闭三角格网模型体积计算方法,加入点云数据精度、模型创建精度、液深测量精度的各不确定度分量,建立以下体积测量模型:
(1)

3.2 点云数据精度引入的测量不确定度分析
点云数据是指经多站点云配准等处理完成后用于点云分割及后续实验,因此其不确定性来源主要有三维激光扫描仪的点位误差和数据配准误差。
3.2.1三维激光扫描仪的点位误差

(2)
3.2.2数据配准引入的测量不确定度分量
(3)
3.2.3点云数据精度引入的不确定度
由以上结果计算点云数据精度引入的不确定度分量为
(4)
u(dD)=1.63mm
三角面片面积总和S为26094.72m2,点之数据精度灵敏系数cΔdD为
(5)
cΔdD=8698.24m2
则点云数据精度引入的不确定度为
u(ΔdD)=cΔdDu(dD)
(6)
u(ΔdD)=14.178m3
3.3 模型创建精度引入的测量不确定度分析
根据模型创建精度检查结果,面片模型与基础参照点云数据实际偏差为0.84mm,模型构建精度引入的不确定度分量为
u(dM)=0.84mm
(7)
三维模型创建精度灵敏系数cΔdM为
(8)
cΔdM=8698.24m2
则模型构建精度引入的不确定度为
u(ΔdM)=cΔdMu(dM)
(9)
u(ΔdM)=7.306m3
3.4 扩展不确定度
综上所述,已知体积计算模型计算各个不确定度分量的标准不确定度值和相应的灵敏系数,各不确定度分量之间彼此独立不相关,因此,其合成标准不确定度为
(10)
uc(V)=15.95m3
取置信概率为95%,体积误差服从正态分布,则包含因子k=2,计算其扩展不确定度为
U95=k·uc(V)
(11)
U95=31.9m3
总容积V取13479.332m3,相对扩展不确定度
(12)
Ur95=2.4‰
4 测量不确定度验证
通过自主开发的三维激光扫描法容量计算软件,计算船舱型容积为13645.600m3,各类构件总体积为166.268m3,船舱净容积为13479.332m3,相对扩展不确定度2.4‰。为验证结果的准确性,采用比对法来进行直观、定量的对比分析。使用几何测量法获得的同一船舱容量作为对比数据,比较正浮状态下同一水平面高度的容积值,并计算其相对偏差,结果如表1所示。
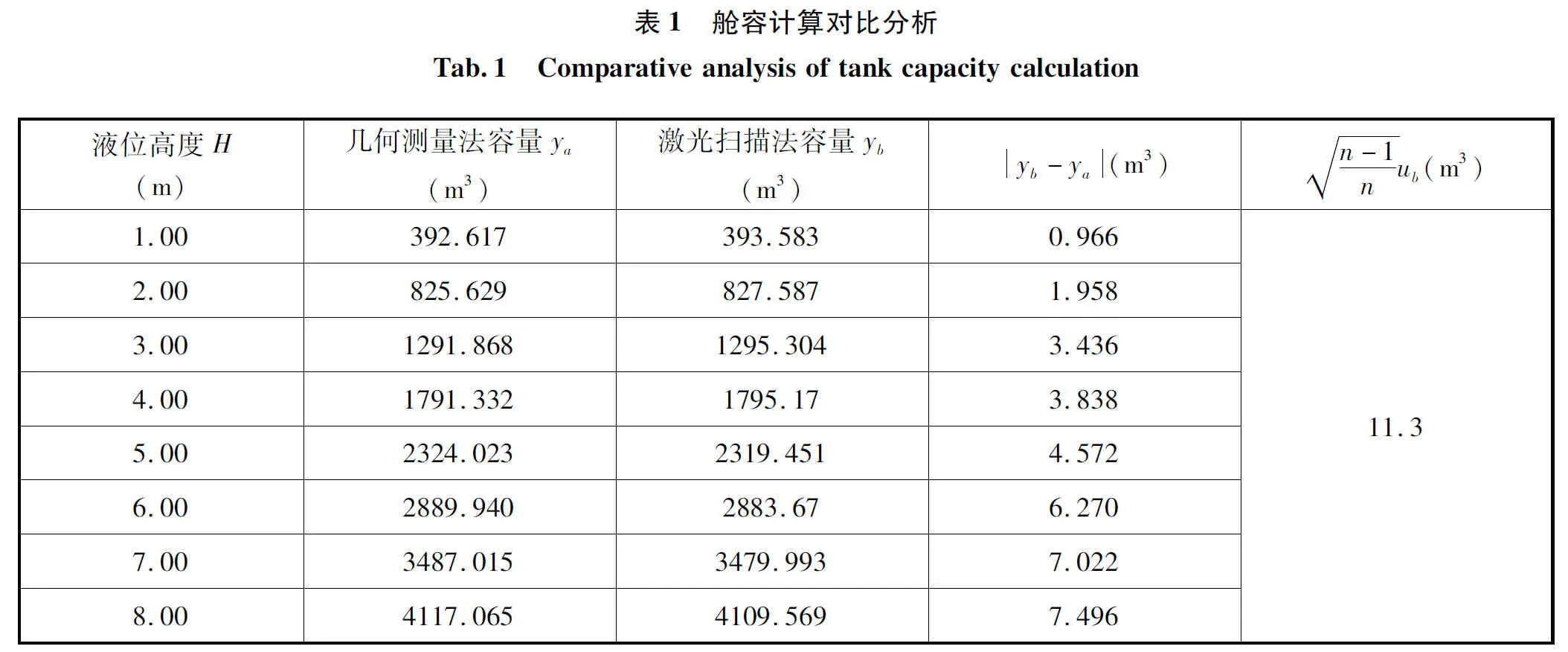
表1 舱容计算对比分析Tab.1 Comparative analysis of tank capacity calculation液位高度H(m)几何测量法容量ya(m3)激光扫描法容量yb(m3)yb-ya(m3)n-1nub(m3)1.00392.617393.5830.9662.00825.629827.5871.9583.001291.8681295.3043.4364.001791.3321795.173.8385.002324.0232319.4514.5726.002889.9402883.676.2707.003487.0153479.9937.0228.004117.0654109.5697.49611.3

续表1液位高度H(m)几何测量法容量ya(m3)激光扫描法容量yb(m3)yb-ya(m3)n-1nub(m3)9.004771.4304763.2358.19510.005449.3005440.6078.69311.006142.8816133.8838.99812.006852.7606843.6719.08913.007569.8967566.4753.42114.008289.2608294.0774.81715.009014.3969023.2568.86016.009730.6949739.1788.48417.0010458.75010468.5069.75618.0011181.81011191.6919.88119.0011903.87011913.2489.378满舱13488.25613479.3328.92411.3
经分析,基于激光扫描技术的结果与几何测量法的结果较为接近,满足精度要求。
4 结束语
基于激光扫描技术的大型船舶计量舱容量校准技术研究具有作业自动化、智能化、高效率、非接触、适应面广等特点和综合优势,可以快速准确地采集船舱的海量三维坐标,并据此进行高密度的拟合计算,得到船舱模型及容量结果。在提高现场测量速度的同时,降低了测量人员与仪器存在的潜在风险,数据点采集的密度也大幅提高,减小了拟合误差,使大型船舱容量计算更加准确。
