一种竞赛用移栽小车设计
2020-08-26冷俊男陈毅豪
冷俊男 陈毅豪
(西北农林科技大学,陕西 杨凌 712100)
1 场地及赛制说明
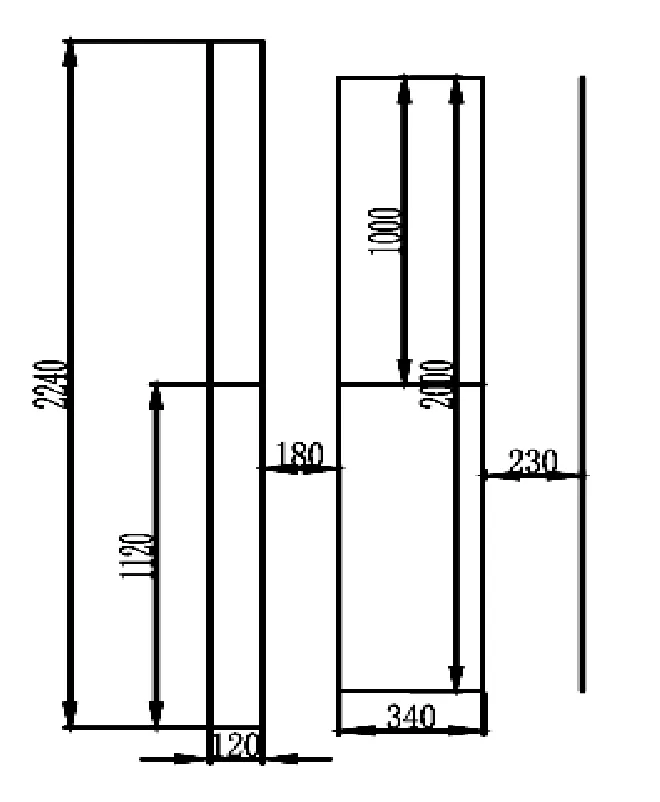
图1 竞赛用场地尺寸方案
本设计所基于的竞赛场地尺寸如图1所示,左边的两狭长矩形为放置盆栽的收货区,上方为红色盆栽移栽区,下方为绿色盆栽移栽区,中间为赛道,右边为初始摆放盆栽的区域(颜色顺序随机摆放),参赛人员需要利用设计的小车自行识别颜色并准确抓取,然后沿赛道进行循迹,随后准确放置在移栽区域。
2 一种竞赛用移栽小车的结构组成
本设计包括机械结构、控制系统与机器视觉3部分。机械结构主要包括小车底盘的布局与移栽机械臂的组装,将所有的直流电机驱动器、步进电机驱动器、开发板、稳压模块、舵机控制板、陀螺仪能够装于底板并方便排线;移栽机械臂主体采用舵机、舵机控制板、金属支架、机械抓爪、轴承、螺钉螺母等组装搭建;支架与舵机连接为金属制法兰盘,法兰盘受力为压力和力矩,舵机均为单侧舵机,在部分连接处为塑料法兰盘销约束,受到支架的压力,但不受力矩影响。

图2 移栽小车结构
机器视觉主要包括视觉模块与循迹系统(灰度传感器),视觉系统主要是基于OpenMV单片机进行识别,然后与主控板STM32开发板进行通讯实时反馈识别结果,从而执行后续相关的抓取动作,其接线较为简便,OpenMV上的3.3V与GND引脚分别与控制板上的引脚相连,TXD引脚与RXD引脚分别与主控板上的RXD,TXD引脚相连,以此来实现通信;灰度传感器包括红外发射和接收管等元器件,发光源采用高亮白色聚光LED,接收管对不同反射光的强弱进行对比处理,对白光反射强弱不同产生差值,从而达到分辨的效果,因此,灰度传感器也比普通红外传感器抗干扰能力要强得多。其识别过程主要是通过2只发光二极管来完成的,一只为发白光的高亮度发光二极管,另一只为光敏探头,前者发出超强白光照射在物体上,通过物体反射回来落在光敏二极管上,由于照射在后者上的光线强弱有变,其阻值也发生变化,灯的亮灭代表高低电平的变化。
控制系统为最重要的系统,主要包括直流电机的驱动、步进电机的驱动、舵机的驱动。本设计所用直流电机型号为GM37-520,自带高低电平磁性霍尔编码器,双相输出,基础信号为11PPR,减速比为1∶150;步进电机控制系统本设计所采用的是42步进电机驱动器套装,出线方式为二相四线插线式,所使用的驱动器型号为TB6600升级版;机械臂的搭建过程中,本设计一共用到了5个舵机,包括2个LDX-218 180°舵机(安装于大臂)、2个LDX-335MG舵机(安装于小臂)与1个LD-1501MG 180°舵机(安装于机械爪)。将各个舵机依次连接上各个机械臂关节和机械爪过后,将信号线与正负电源线和舵机控制板按舵机顺序编号对应连接起来。
3 一种竞赛用移栽小车工作流程
工作时,小车中间和右侧的灰度传感器用于检测黑线,当左侧的灰度传感器检测到黑线时,说明小车向右偏斜,小车随即向左纠正;当右侧的灰度传感器检测到黑线时,说明小车向左偏斜,小车随即向右纠正。
小车在盆栽摆放区行进时,视觉模块检测到盆栽,向stm32单片机返回信号,小车停车并开始夹取盆栽,动作完成后,开始向红绿分离区前进,若stm32单片机接收到视觉模块发送的红花信号,将前往红花区,放下红花盆栽;若stm32单片机接收到视觉模块发送的绿花信号,将前往绿花区,放下绿花盆栽。动作完成后,小车将回到盆栽摆放区的起点,重复对盆栽的识别及摆放过程。

图3 竞赛用移栽小车控制流程
控制系统作为本设计的核心系统,对于控制系统有必要单独进行说明,让读者更加清晰地了解本设计的控制流程:小车前进时stm32单片机给4个直流电机输入相同的PWM波值,给左边2个驱动器赋相同的转向信号,右边2个驱动器赋相反的转向信号;小车后退时stm32单片机给驱动器赋相反的转向信号,使4个轮子的转向与前进时相反即可;小车左转时stm32单片机接收到左侧灰度传感器的高电平信号后,给左边2个驱动器赋反向的转向信号,右边2个驱动器赋正向的转向信号;小车右转时stm32单片机收到右侧灰度传感器的高电平信号后,给左边2个驱动器赋正向的转向信号,右边2个驱动器赋反向的转向信号;纠正位置时,stm32 单片机接收到中间灰度传感器的高电平信号时,说明小车偏左,给4个驱动器输出不同的PWM波值,使左边2个电机的转速大于右边2个轮子,小车向右纠正;stm32 单片机接收到右侧灰度传感器的高电平信号时,说明小车偏右,给4个驱动器输出不同的PWM波值,使右边2个电机的转速大于左边2个电机转速,小车向左纠正。其控制树图如图所示。
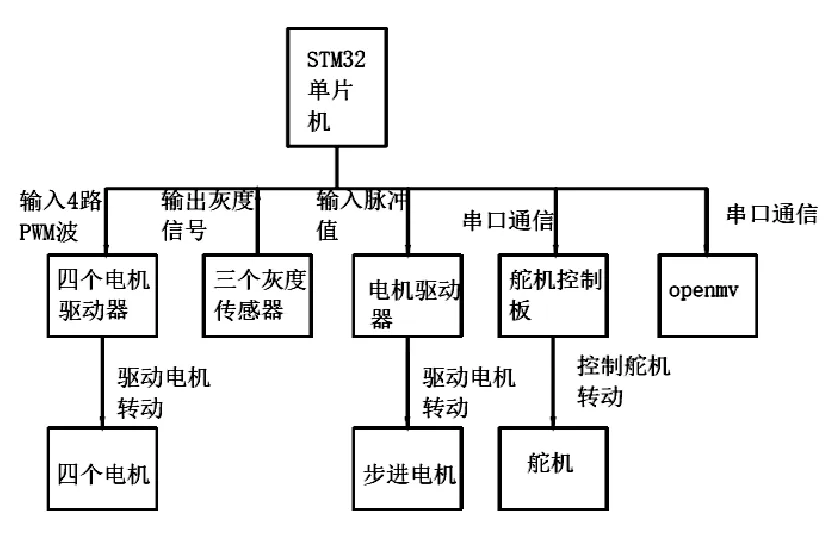
图4 系统控制流程
4 结语
本设计是一种基于STM32单片机、机器视觉、移栽机械臂的移栽小车,STM32单片机可以与舵机控制板、视觉模块与循迹模块、步进电机控制板完成通信,是整个控制系统的核心中枢,而视觉模块与移栽机械臂则保证了移栽的准确性。这种移栽小车可以达成一些竞赛目标,进一步完善过后也可以替代一些农业、林业或者展览的人工移栽。