基于FNN的电力无人机避障方案设计
2020-06-29包志鹏李梓菲李梓璐李梓锴郭博杨
包志鹏 李梓菲 李梓璐 李梓锴 郭博杨
摘要:基于目前电力巡检无人机由于避障问题未能广泛普及的背景,提出将多元化传感器,即超声波传感器、激光传感器、GPS传感器组合应用于电力无人机巡检平台,同时通过FNN算法,对多元化传感器采集的无人机自身及周边物体的物理信息进行计算处理,从而指导无人机作出正确判断,即继续飞行、阶段绕行或悬停等待。
关键词:无人机;电力巡检;FNN;多元化传感器
0 引言
工業的正常运转、百姓的安居乐业离不开电网的稳定运行。我国国土辽阔,能源丰富,其中电能的稳定传输及分配显得尤为重要。电力系统故障给工业和民用带来的经济损失无法估量。电力巡检工作可以有效减少电力系统故障的发生,从而减少经济损失。但是电力巡检工作强度、难度不容小觑,传统的人工巡检方式存在效率低下,人身安全无法保障等弊端,同时我国高压输电线路因为自然条件恶劣,无法通过人工方式进行巡检,因此无人机在电力巡检中的广泛应用势不可当。但是无人机应用于电力巡检的复杂环境中,仍然存在技术壁垒:首先人工操作难度大,工作人员需要经过长期培训;其次如果操作失误,坠机损失惨重,且可能损坏输电线路。因此,需对无人机的自主飞行技术展开研究。本文通过结合多种传感设备及FNN神经网络算法,深入研究分析,探讨电力巡检过程中无人机自主飞行的优化策略。
1 多元化传感器在电力巡检中的应用
1.1 多元化传感器的设计原理
工业中多元化传感的设计原理最初起源于人及其他动物获取信息的方式。生物界中几乎所有的动物都具有不止一个用于感知世界的器官,比如我们人类,通过眼睛获得视觉信息,通过鼻子获得嗅觉信息,通过耳朵获得听觉信息,通过舌头获得味觉信息,这些从不同维度获得的信息融合在一起,能让人类更加准确高效地感知这个世界。同时,如果其中一个感知器官暂时或永久失去功能,其他感知器官几乎仍然可以准确地感知世界。多元化传感器就是基于这个原理,让各个传感器分别采集信息,然后对各维度的信息进行汇聚分析,从而达到高效准确获取物理世界信息的目的。
1.2 多元化传感器的实现方法
多元化传感器的组合方式可以仿照电路系统大体分为三类,依次为串联方式、并联方式、串并联融合方式。信息的融合大致发生在三个阶段,通常称作数据层、特征层、决策层。数据层就是在数据层面汇聚信息,属于最低层次;特征层则是提取有效特征汇聚在一起进行分析,属于中间层;决策层是事先对采集的数据进行预处理后汇聚信息,类似于常说的边缘计算技术,属于最高层次的信息融合。
多元化传感器融合的核心是信息的融合,信息的融合需要采用现代化智能算法。常用的方法分为经典方法和现代方法。经典方法包括加权平均法、卡尔曼滤波、最小二乘法、极大似然估计、贝叶斯估计、品质因素法、经典推理法等。现代方法包括聚类分析法、模版法、熵理论、模糊逻辑、遗传算法、神经网络、模糊积分理论等。
2 无人机电力巡检业务需求分析
2.1 无人机避障需求
我国输电线路分布范围广,且地形复杂,遍及平原、高原、山地、丘陵、盆地,无人机在飞行过程中难免受环境影响,不能按照预定的航线飞行。除了在线路和杆塔正常定点飞行外,还有遇到过高的树木、小鸟的巢穴、正在施工的人员或机器等不确定因素。为了避免无人机碰撞引发坠机或损坏线路的现象,利用多元化传感器帮助无人机感知障碍物,然后调整飞行姿态和路径是目前研究的重点。
2.2 无人机自主飞行策略规划
无人机自主飞行的先决和核心条件就是自动避障,所以多元化传感器搭载在无人机平台上,能够帮助无人机采集自身及周边环境信息,从而作出正确判断,在紧急情况下自动避障,并在避障后自动调整回原航线。首先将线路障碍物划分为静态和动态两大类。静态避障相对简单,将以无人机为圆心的区域划分为几个层次,第一层是安全区,即无需调整;第二层是规划区,即需要随时准备调整;第三层是碰撞区,即需要立即作出调整。动态避障,需要在静态避障的基础上预测障碍物的运动轨迹,同时作出等待或绕行的决策。
3 基于FNN的电力无人机避障方案设计
3.1 基于多元化传感器的无人机避障方案
我国电力巡检环境复杂,无人机技术可以替代传统的人工巡检,但无人机避障问题亟待解决。近些年,传感器技术得以迅速发展,目前可用于无人机避障的传感器数不胜数。红外传感器通过物体表面温度感知物体,但巡线时障碍物多数为没有生命体征的物体,所以红外传感器不适合。可见光传感器可以获得物体照片,但是无法判断距离和位置,所以也不适合避障应用。本文经过对比分析,决定采用质量轻、体积小、成本低的超声波传感器、激光传感器和GPS传感器。超声波传感器能发出超声波,当碰到物体时声波返回,根据波速和时间可以计算物体距离是否在安全区。激光传感器工作原理类似,只是发出的是激光。GPS可以定位位置信息,技术相当成熟,在国内外各个领域应用广泛。
3.2 FNN算法在电力无人机巡检中的应用
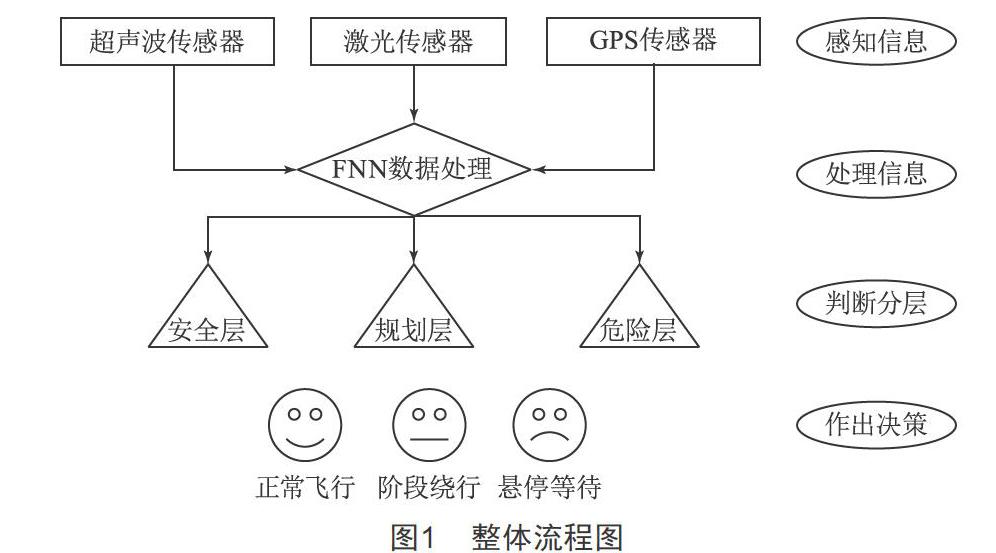
模糊理论和神经网络理论是近年来人工智能技术中的热点。神经网络是模拟人的大脑处理信息,可以通过学习和联想处理问题,人工干预少,但是对于一些边界不清楚的模糊问题不能利用已学习的知识灵活处理。而模糊理论正好与其互补,它对于样本要求低,能够利用专家知识处理模糊问题,但是工作效率低且需要人为干涉。如果能将二者结合,则可弥补其各自的不足。本文首先通过激光传感器、超声波传感器、GPS传感器获取无人机及周围物体的位置及距离信息,然后结合无人机自身原定轨迹,通过FNN算法计算其是否处于危险区及规划区,如果没在则正常飞行,如果在则作出绕行或等待的决定,从而避免因为碰撞造成的经济损失。
无人机避障方案整体流程图如图1所示。
4 结语
本文首先基于我国输电线路巡检环境恶劣的背景,思考无人机代替人工巡檢需要面临的避障问题;然后提出通过搭载多元化传感器感知物理世界信息,同时通过FNN算法处理多元化传感器采集到的物理世界信息;最后综合计算结果,为无人机作出绕行、等待、正常飞行的决定提供可靠依据。
[参考文献]
[1] 郭剑东,王康,李志宇.基于凸面体圆弧航路的无人机自主避障算法[J/OL].控制与决策(2019-09-29)[2020-02-20].https://doi.org/10.13195/j.kzyjc.2019.0768.
[2] 温家鑫,赵国荣,赵超轮,等.基于改进人工势场的无人机编队避障[J/OL].飞行力学(2019-11-18)[2020-02-20].https://doi.org/10.13645/j.cnki.f.d.20191116.008.
[3] 张乐,袁锁中,黄永康.连续障碍环境下无人机实时避障控制[J/OL].电光与控制(2019-12-19)[2020-02-20].https://kns.cnki.net/KCMS/detail/41.1227.TN.20191219.0920.006.html.
[4] 伍友利,叶圣涛,方洋旺,等.固定翼无人机群的集群和避障控制[J].国防科技大学学报,2019,41(5):103-110.
[5] 申燕凯,段海滨,邓亦敏,等.仿鸽群被动式惯性应急避障的无人机集群飞行验证[J].中国科学(信息科学),2019,49(10):1343-1352.
[6] SALT L,HOWARD D,INDIVERI G,et al.Parameter Optimiz-ation and Learning in a Spiking Neural Network for UAV Obstacle Avoidance Targeting Neuromorphic Proce-ssors[J].Journal of Latex Class Files,2015,14(8):1-14.
收稿日期:2020-03-04
作者简介:包志鹏(1995—),男,甘肃永靖人,工程师,从事电网智能检测研究应用工作。
