自动驾驶环境下的路网混合流量日变模型
2020-06-17田晟许凯朱泽坤曾莉莉
田晟 许凯 朱泽坤 曾莉莉
(华南理工大学 土木与交通学院,广东 广州 510640)
伴随自动驾驶技术的日渐成熟,自动驾驶车辆将会成为一种重要的出行方式,结合自动驾驶车辆的特性,其必然会对现有的城市交通系统产生重大影响,改变现有的出行方式及交通流模式。类似于传统的出行者(指非自动驾驶车辆),自动驾驶车辆在日复一日的出行中也会逐渐调整出行选择,但与传统的出行者不同,自动驾驶车辆不具有人类的偏好属性、风险态度,不对路径选择产生主观化的感知,而是根据计算机计算出的结果做出路径规划。因此,自动驾驶车辆与传统车辆具有不同的路径选择规则,在逐日出行过程中表现出不同的流量演化情况。传统车辆出行者在动态交通环境下的逐日出行过程中,以出行经验及历史信息为基础,以自身感知的前景值为依据进行路径选择,考虑到出行者对路网信息的了解存在误差,传统车辆流量逐日演化至SUE(Stochastic User Equilibrium,随机用户均衡)状态;对于自动驾驶车辆而言,其路径选择过程不依赖于人的主观感知,而是按照预先设定的规则进行路径选择,从管理者的角度最希望自动驾驶车辆这部分流量可以达到系统最优状态,从而使这部分流量的系统总时间最小,因此通过自动驾驶车辆的计算模块设计,使其向着SO(System Optimal,系统最优)状态进行逐日动态演化。
既有研究主要集中在自动驾驶车辆对出行者的吸引力及对城市交通拥堵的影响分析方面。Haboucha等[1]和Daziano等[2]分别通过问卷调查和网络调查获取数据,采用离散选择logit模型分析了出行者对于自动驾驶车辆的接受程度及支付意愿。Harper等[3]从自动驾驶车辆自动化的特性出发,研究了自动驾驶车辆对于不具备驾驶能力群体的吸引力及导致的出行需求增加边界。Maciejewski等[4]和Vincent等[5]研究了自动驾驶车辆对出行需求、流量分布及路网拥堵情况的影响,发现自动驾驶车辆通过诱增出行可能加剧交通拥堵。此外,部分学者研究了自动驾驶车辆引发的交通规则与相关政策的制定问题,如Fagnant等[6]研究了自动驾驶车辆与传统车辆竞争造成的巨大成本及社会影响,指出目前对自动驾驶车辆尚缺乏统一的标准,责任判定、安全问题及数据隐私等实施细节仍不确定。以上研究均未从自动驾驶车辆投放后对传统路网流量的动态影响方面进行分析,而路网流量的变化会引起交通供给与交通需求的波动,从而影响整个交通网络的稳定性与可靠性。
文中考虑自动驾驶车辆投放对现有交通网络的影响,用前景理论描述传统车辆出行者的出行行为,以传统车辆流量达到最大路径前景为目标,建立传统车辆流量日变模型;对于自动驾驶车辆则不需要考虑出行者的出行行为,以自动驾驶车辆流量达到最小路径边际阻抗为目标,建立自动驾驶流量日变模型。为简化研究,假设两类流量的逐日调整均以实际出行信息作为数据输入,且出行途中不改变路径。传统车辆流量日变模型和自动驾驶流量日变模型共同构成了城市交通网络的混合流量日变模型。通过观察两类流量的逐日动态演化过程,可以分析自动驾驶车辆投放后对路网系统的影响及混合流量的演化规律,从而为应对自动驾驶车辆对交通系统的影响做好预先准备,为交通政策、决策的制定提供科学依据。
1 混合流量日变模型基础结构
假设路网G=(N,A),N表示节点集,A表示路段集,对于任意路段a,有a∈A。用r、s分别表示起讫点,R、S分别表示起讫点集合,有rs∈RS。用k表示路径,K表示路径集,有k∈K。在有自动驾驶车辆行驶的路网中,自动驾驶流量和传统车辆流量在路网中分别进行逐日出行路径调整,由于两部分流量的差异性,它们采用不同的目标和不同的演化规则,因此混合流量日变模型包括传统车辆流量日变模型和自动驾驶流量日变模型两部分。路网中的流量由自动驾驶流量和传统车辆流量两部分构成,见式(1)。路网中各部分流量分别等于各路径的流量之和,见式(2)和(3)。
(1)
(2)
(3)
(4)

(5)
(6)
2 传统车辆流量日变模型
出行者选择日常出行路径时,往往依赖于往日的出行经验、自身的偏好,对路网产生一定的认识并做出择路决策。考虑到出行者对风险的态度,用前景理论描述出行者的逐日出行行为。在日常重复出行中,出行者不断熟悉路网,随着出行天数的增加来更新对路网的认知,以行程时间为基础,结合自身的风险偏好属性,出行者以出行收益前景值最大为目标进行逐日路径调整。
采用路径前景来进行路径选择需要建立出行收益或者损失框架[7- 8],因此需确定关于路径前景的3个部分。假设参考点事先给定且不随时间变化,用e0表示;同时假设理解行程时间etk(n)依赖于前一天的实际出行时间,即etk(n)=tk(n-1)。价值函数v见式(7),决策权重函数w见式(8),路径前景pv见式(9)。
(7)
(∀rs∈RS,k∈Krs)
(8)
(∀rs∈RS,k∈Krs)
(9)
(∀rs∈RS,k∈Krs)

PVk(n)=pvk(n)+εk
(10)
式中,εk表示出行者对实际路径前景值的观测误差,假定其服从独立的Gumbel分布。出行者依据路径前景进行路径选择且路网处于非均衡状态时,流量会逐渐向路径前景较大的路径转移。当传统车辆流量满足随机用户均衡条件时,所有具有传统车辆流量的路径前景相等且等于最大前景值,见式(11),所有没有传统车辆流量的路径前景不大于最大路径前景值,见式(12)。
(11)
(12)
式中,PV*rs表示传统车辆流量达到网络均衡时起讫点rs间的最大路径前景值。
传统车辆出行者在逐日出行中根据前一日的路径前景调整当日的出行路径,直至达到传统车辆流量均衡状态。考虑传统车辆流量转移过程及SUE平衡条件,结合文献[9- 10]建立传统车辆流量日变模型,见式(13)-(15):
(13)
(14)
(15)

3 自动驾驶流量日变模型
自动驾驶车辆的流量演化目标是使路网中的这部分流量总出行时间最小,即
(16)
根据系统最优的均衡条件,若自动驾驶流量满足系统最优,在所有具有自动驾驶流量的路径上增加一个出行单位时,该单位遇到的阻抗及该单位经过路径对原有流量产生的额外阻抗最小,即增加一个出行单位对网络总阻抗的边际贡献最小,见下式:
(17)
所有没有自动驾驶流量的路径增加一个出行单位时,该增加的出行单位对路网总阻抗的边际贡献不小于最小边际阻抗,即
(18)
路段阻抗函数采用BPR函数,故对于边际阻抗函数中的微分项可以进行代入,见式(19):
(19)
自动驾驶车辆在逐日的路径调整过程中遵循系统最优原则调整出行路径,直至达到路网中自动驾驶流量系统最优状态。自动驾驶流量转移过程类似传统车辆流量转移,故参考传统车辆流量日变模型,建立自动驾驶流量日变模型如下:
(20)
(21)
(22)
4 算例分析

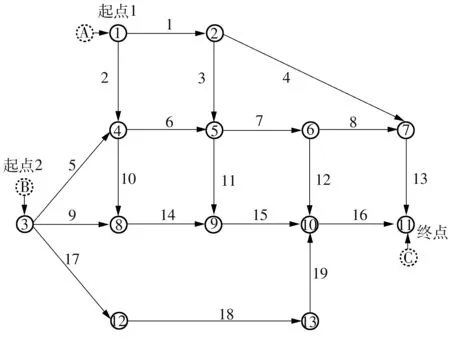
图1 测试网络Fig.1 Test network
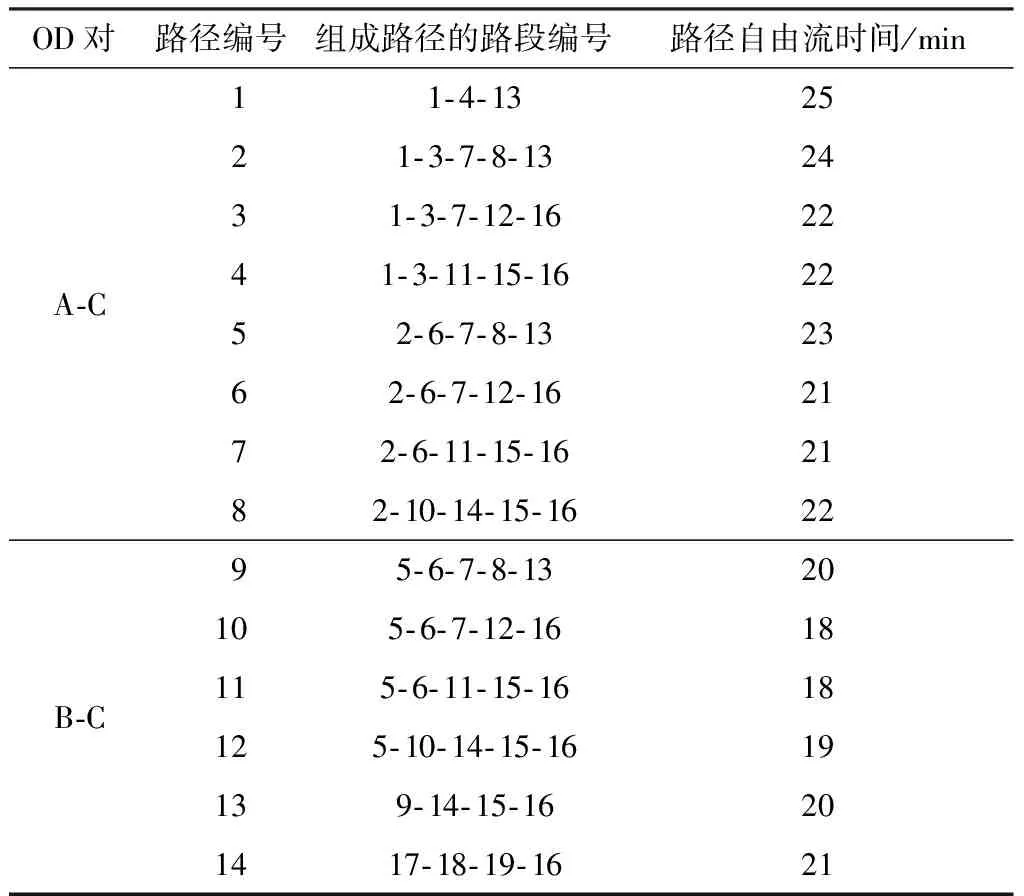
表1 各路径的路段组成Table 1 Links of each path
4.1 混合流量均衡状态分析
图2-4分别是混合流量、传统车辆流量和自动驾驶流量在各路径随时间的演化情况。通过观察3幅图中的流量变化可知,3类路径流量在100 d以后的变化很小,达到近似均衡状态;流量在前10 d波动最为剧烈,从第10 d到第50 d向着各自的均衡状态演化,50 d后大部分流量完成路径转移,随后少部分流量继续调整直至达到混合均衡状态。比较传统车辆流量和自动驾驶流量可以发现,自动驾驶流量前期波动较大且达到近似均衡状态的速度较快,而传统车辆流量前期波动较小且达到近似均衡状态用时相对较长,而总流量是两类流量共同作用的结果,以路径9为例,前50 d中传统车辆流量较大幅度下降而自动驾驶流量较大幅度上升,但总流量在30 d内没有大幅度变化。均衡状态时,混合流量在除路径5和路径13的其他路径都有流量,而传统车辆在6条路径上的流量为0,自动驾驶车辆在9条路径上的流量为0,从表2可以看出,只有路径12上同时存在两种类型的流量,这与两类流量的择路机制有关,即分别向前景值最大和边际阻抗最小的路径演化。
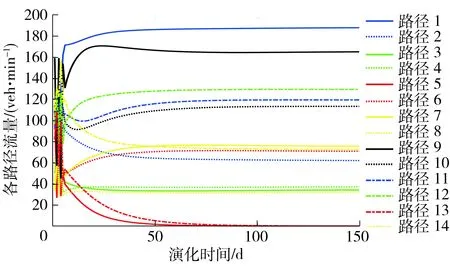
图2 混合流量在各路径的演化Fig.2 Evolution of mixed flow of each path
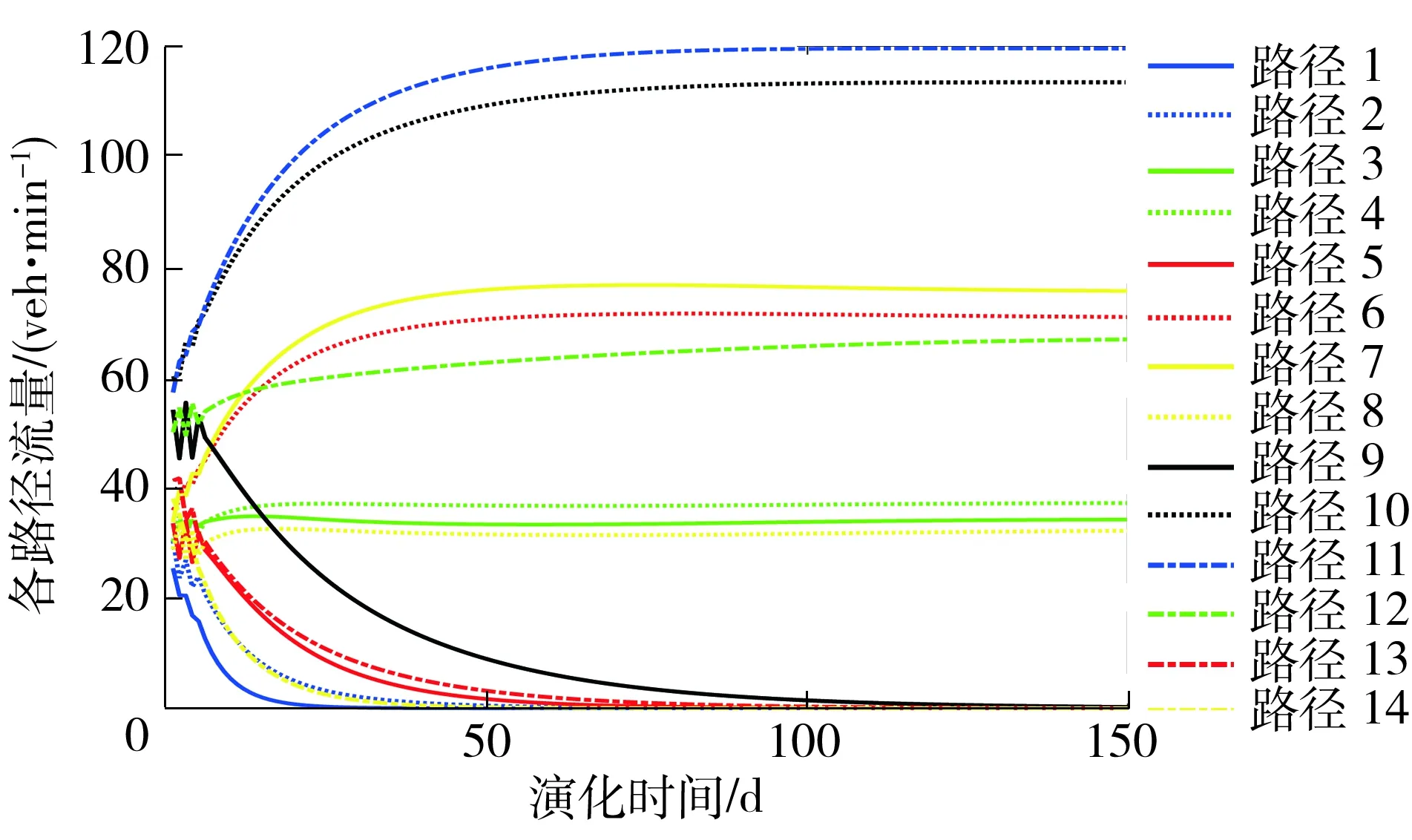
图3 传统车辆流量在各路径的演化Fig.3 Evolution of traditional vehicle flow in each path
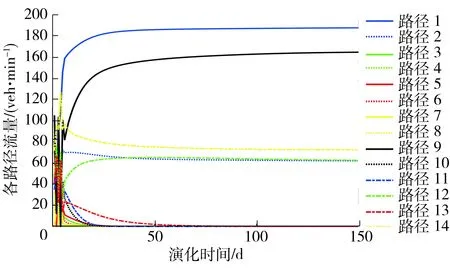
图4 自动驾驶流量在各路径的演化Fig.4 Evolution of autonomous vehicle flow in each path
表2 混合均衡时两类流量的路径分布
Table 2 Path distribution of two types of traffic in mixed equalization

OD对传统车辆流量路径分布自动驾驶流量路径分布A-C3、4、6、7、81、2B-C10、11、129、12、14
4.2 自动驾驶车辆比例对路网系统的影响
图5是不同的自动驾驶车辆比例下路网系统总时间的演化情况。图中分别给出了自动驾驶车辆占比η为0.1、0.2、0.3、0.4和0.5时系统总时间随演化时间推进的变化情况,可以看出,η=0.5时,路网系统总时间在80 d附近时趋于收敛,略大于24 800 min,而η=0.1,0.2,0.3时,路网系统总时间在150 d时仍未收敛且有继续增加的趋势。随着自动驾驶车辆比例的提高,路网系统总时间减小,原因在于自动驾驶车辆以系统最优为目标进行流量演化,故其比例越高则系统总时间越小。
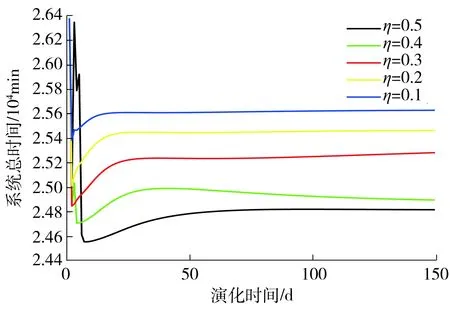
图5 不同自动驾驶车辆比例下对应的路网系统总时间
Fig.5 Total time of network system corresponding to different proportions of autonomous vehicles
图6是路径1的总流量在不同自动驾驶车辆比例下的演化情况。可以看出,随着自动驾驶车辆比例的降低,混合均衡时路径1的总流量下降,说明不同的自动驾驶车辆比例会产生不同的混合均衡状态。结合图2-4分析可知,混合均衡时路径1的流量均由自动驾驶车辆构成,考虑到各路径的自由流时间,路径1可能是路径前景较小的路径,均衡状态时,传统车辆流量在路径1上无分布,而自动驾驶流量为追求系统最优在路径1分布,故当自动驾驶流量的比例降低时,路径1流量下降。
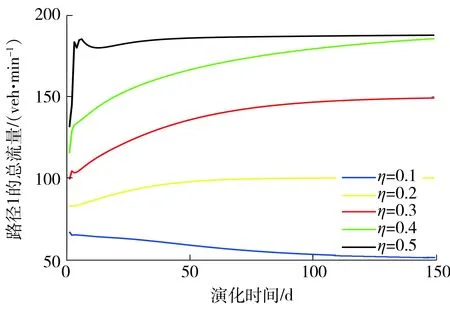
图6 路径1总流量在不同自动驾驶车辆比例下的演化
Fig.6 Total flow evolution of path 1 under different proportions of autonomous vehicles
4.3 流量转移阈值对混合流量动态演化的影响

图7是设定流量转移阈值后各路径总流量的逐日演化情况。结合图2可以发现,提高阈值后,均衡状态下的各路径均有流量,而图2中路径5和路径13没有流量,且各路径流量大小排序发生变化,图2中各路径流量从大到小依次为1- 9- 12- 11- 10- 7- 14- 6- 2- 4- 3- 8- 13- 5,图7中各路径流量从大到小依次为1- 9- 12- 14- 11- 2- 10- 7- 6- 4- 13- 8- 3- 5,原因在于前景差值需达到阈值后流量才在路径间转移,因此传统车辆流量在路径间的转移次数会减少,向前景值大的路径上转移的流量少于阈值为0的情况,由图3和8可以印证这点。图3中传统车辆流量为0的路径有6条,而图8中只有1条,且两种情况下自动驾驶流量的演化情况类似(参考图4和9),因此图7中各路径都有流量是传统车辆这部分流量的作用。
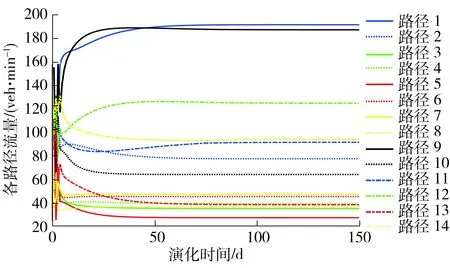
图7 阈值下各路径的混合流量演化Fig.7 Evolution of mixed flow of each path under threshold
为前景差值设置阈值后,传统车辆流量的随机用户均衡条件发生了变化,可以描述为当传统车辆流量满足随机用户均衡条件时,对于所有具有传统车辆流量的任意两条路径,其前景差值的绝对值不超过给定阈值,见式(23);对于所有没有传统车辆流量的路径,其与任意一条具有传统车辆流量的路径的前景差值不超过给定阈值,见式(24):
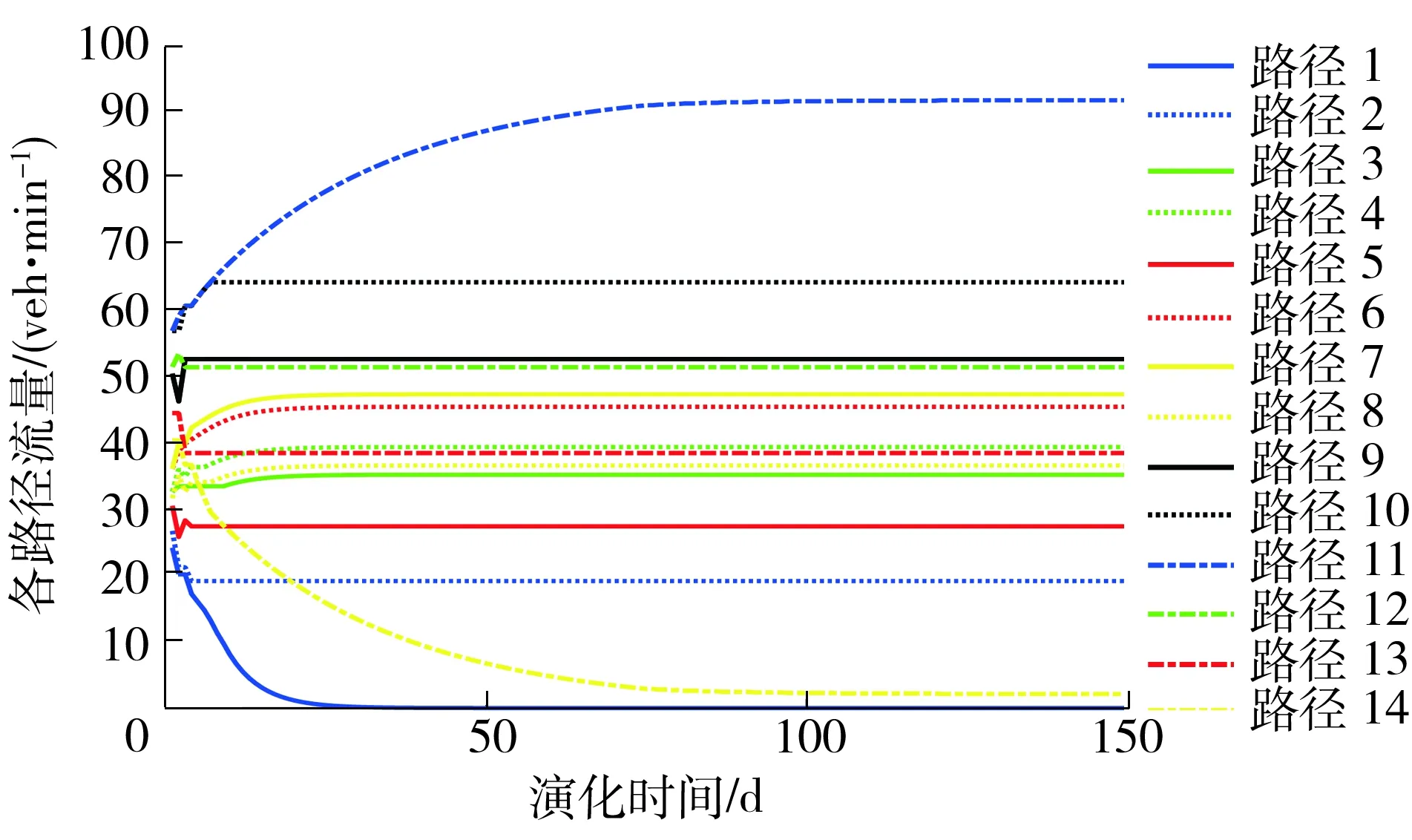
图8 阈值下各路径的传统车辆流量演化
Fig.8 Evalution of traditional vehicle flow of each path under threshold
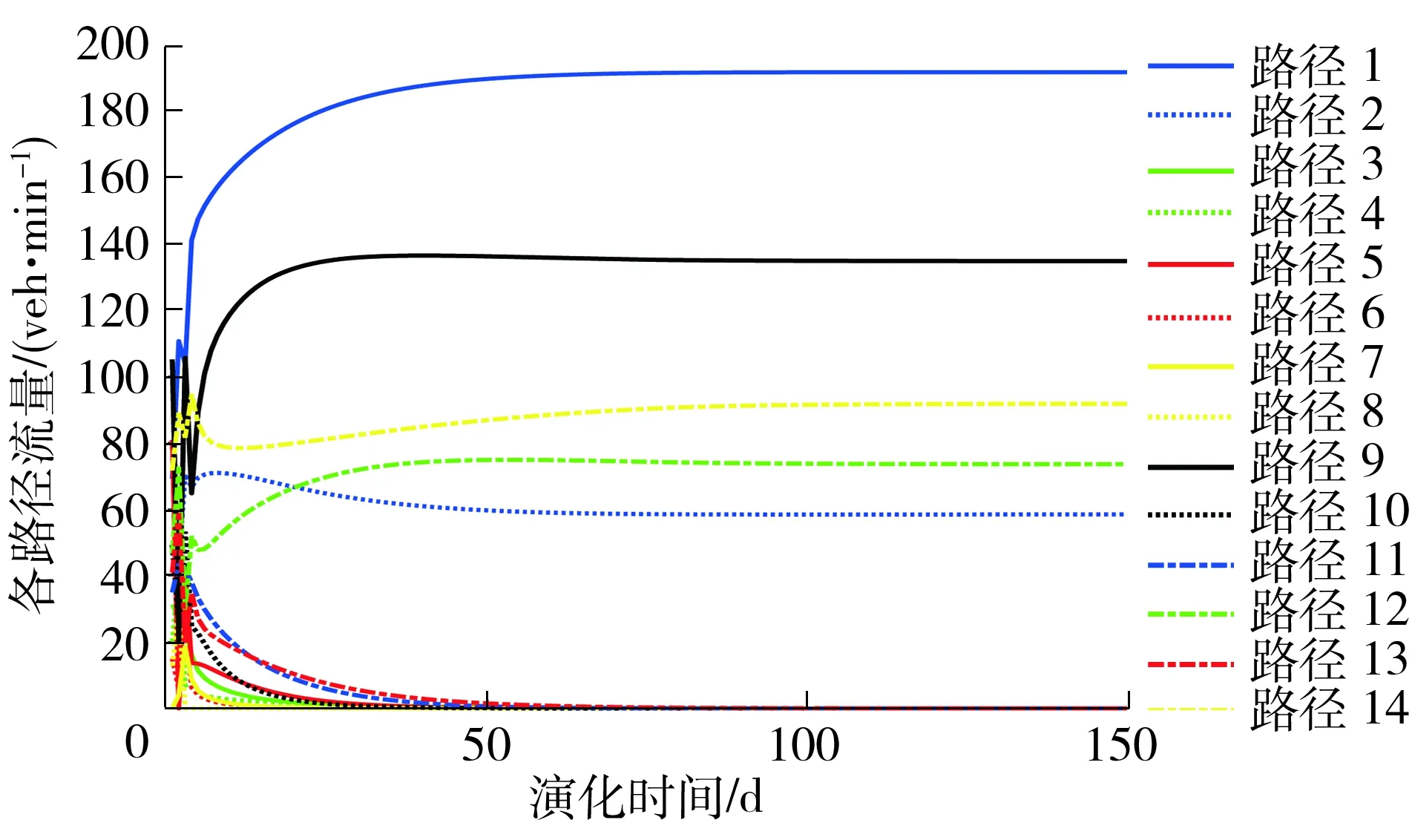
图9 阈值下各路径的自动驾驶流量演化
Fig.9 Evolution of autonomous vehicle flow of each path under threshold
(23)
(24)
表3是有、无阈值条件下各路径的稳定流量与对应的路径前景、边际阻抗。路径1-8是OD对A-C间的路径,9-14是OD对B-C间的路径。首先观察前景值。无阈值条件下,路径1-8中存在传统车辆流量的路径为3、4、6、7、8(参考图3),对应的前景值均为23.629,是A-C间的最大前景值;路径9-14中存在传统车辆流量的路径为10、11、12(参考图3),对应的前景值均为25.311,是B-C间的最大前景值。有阈值条件下,只有路径1没有传统车辆流量,A-C间存在传统车辆流量的路径前景范围为(23.12,24.198),最大前景值与最小前景值之差1.078小于阈值1.156,满足式(23);B-C间存在传统车辆流量的路径前景范围为(24.652,25.884),同样满足式(23);对于路径1,其前景值比存在传统车辆流量的路径的前景值都要小,满足式(24)。然后观察边际阻抗。无阈值条件下,A-C间存在自动驾驶流量的路径为路径1和2,边际阻抗为26.132,路径3-8的阻抗均大于26.132;B-C间存在自动驾驶流量的路径为路径9、12和14,边际阻抗为27.373,比B-C间其他路径的边际阻抗小。有阈值条件下,最小边际阻抗路径与无阈值时相同,原因在于自动驾驶流量没有转移阈值,阈值的设定主要作用于传统车辆流量。
表3 有、无阈值条件下各路径的稳定流量与对应的前景值及边际阻抗
Table 3 Stable flow as well as corresponding prospect value and marginal impedance of each path with or without threshold
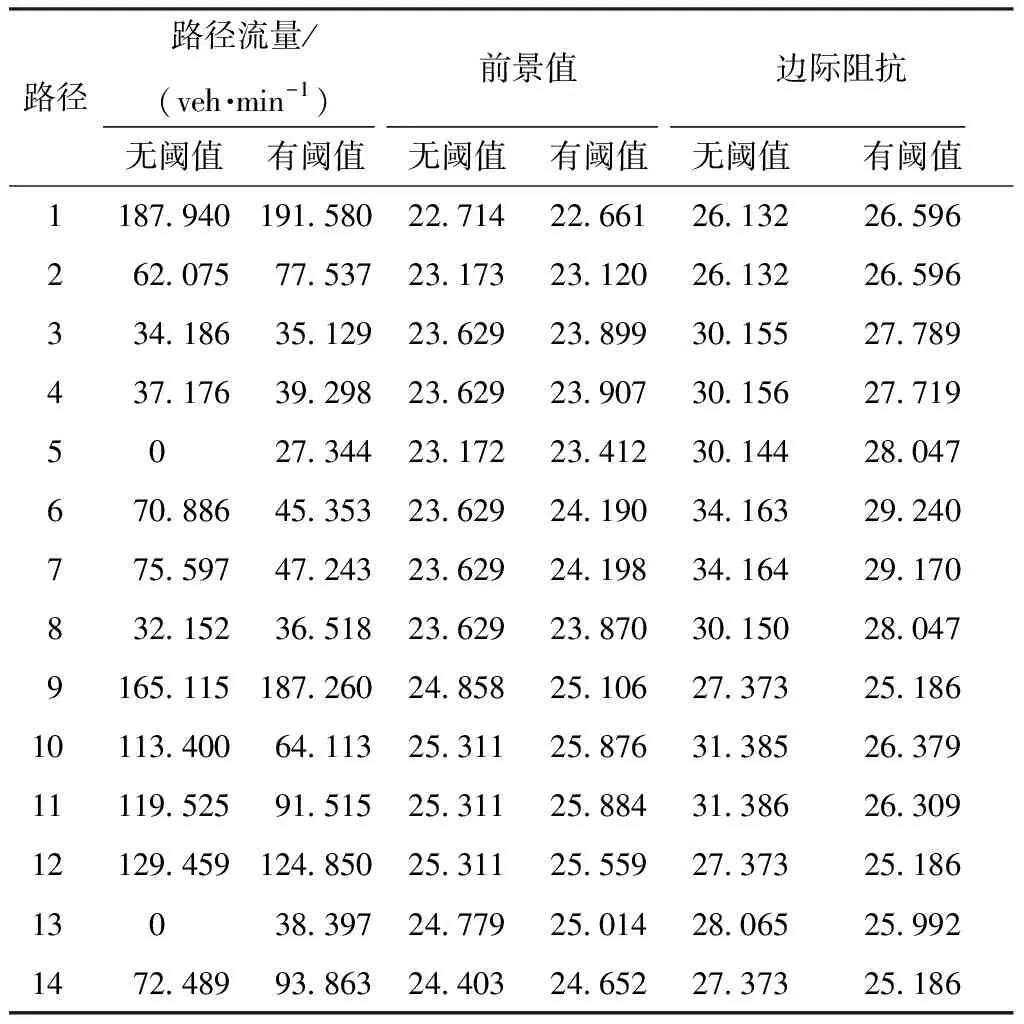
路径路径流量/(veh·min-1)前景值边际阻抗无阈值有阈值无阈值有阈值无阈值有阈值1187.940191.58022.71422.66126.13226.596262.07577.53723.17323.12026.13226.596334.18635.12923.62923.89930.15527.789437.17639.29823.62923.90730.15627.7195027.34423.17223.41230.14428.047670.88645.35323.62924.19034.16329.240775.59747.24323.62924.19834.16429.170832.15236.51823.62923.87030.15028.0479165.115187.26024.85825.10627.37325.18610113.40064.11325.31125.87631.38526.37911119.52591.51525.31125.88431.38626.30912129.459124.85025.31125.55927.37325.18613038.39724.77925.01428.06525.9921472.48993.86324.40324.65227.37325.186
4.4 传统与自动驾驶环境中短期事件下的流量演化比较
为了比较有、无自动驾驶车辆对短期事件下混合流量演化的影响,本节考察了两类环境下的路网流量演化过程。
分析传统出行环境中短期事故对路网流量的演化的影响,取γ=0.025。图10是纯传统车辆流量转移阈值对应的各路径流量的演化情况。图11是n=10时纯传统车辆流量下路段5的通行能力由800降至250时的各路径流量演化情况。分析自动驾驶环境中短期事故对路网流量演化的影响,以4.3节中的混合流量为基础进行研究。图12是n=10时混合流量下路段5发生交通事件导致路段通行能力降至250时的各路径流量演化情况。比较图10与11、图7与12,并结合表4观察流量的大小及各路径流量的大小关系可知,传统出行环境中,发生事件与未发生事件两种情况下,流量在不断调整后达到不同的稳定状态,流量的大小关系亦不同,这与文献[11]的结论是一致的。自动驾驶环境中,短期事件后路网混合流量能逐渐演化至与发生短期事件之前类似的稳定状态,各路径流量的大小有微小变化,各路径流量的大小关系与短期事件前保持一致。比较两类出行环境下的流量分布,可以发现短期交通事件下自动驾驶流量会促使事故发生后的混合流量稳定状态趋同于事故发生前的流量稳定状态,原因在于无人驾驶车辆不存在流量转移阈值,这部分流量仍按照原有规则转移路径流量,因此事故前后的近似稳定流量只表现为流量大小的少量变化,同时应注意本节假定两类流量的比例相同,不同比例的自动驾驶车辆会导致不同的流量分布。
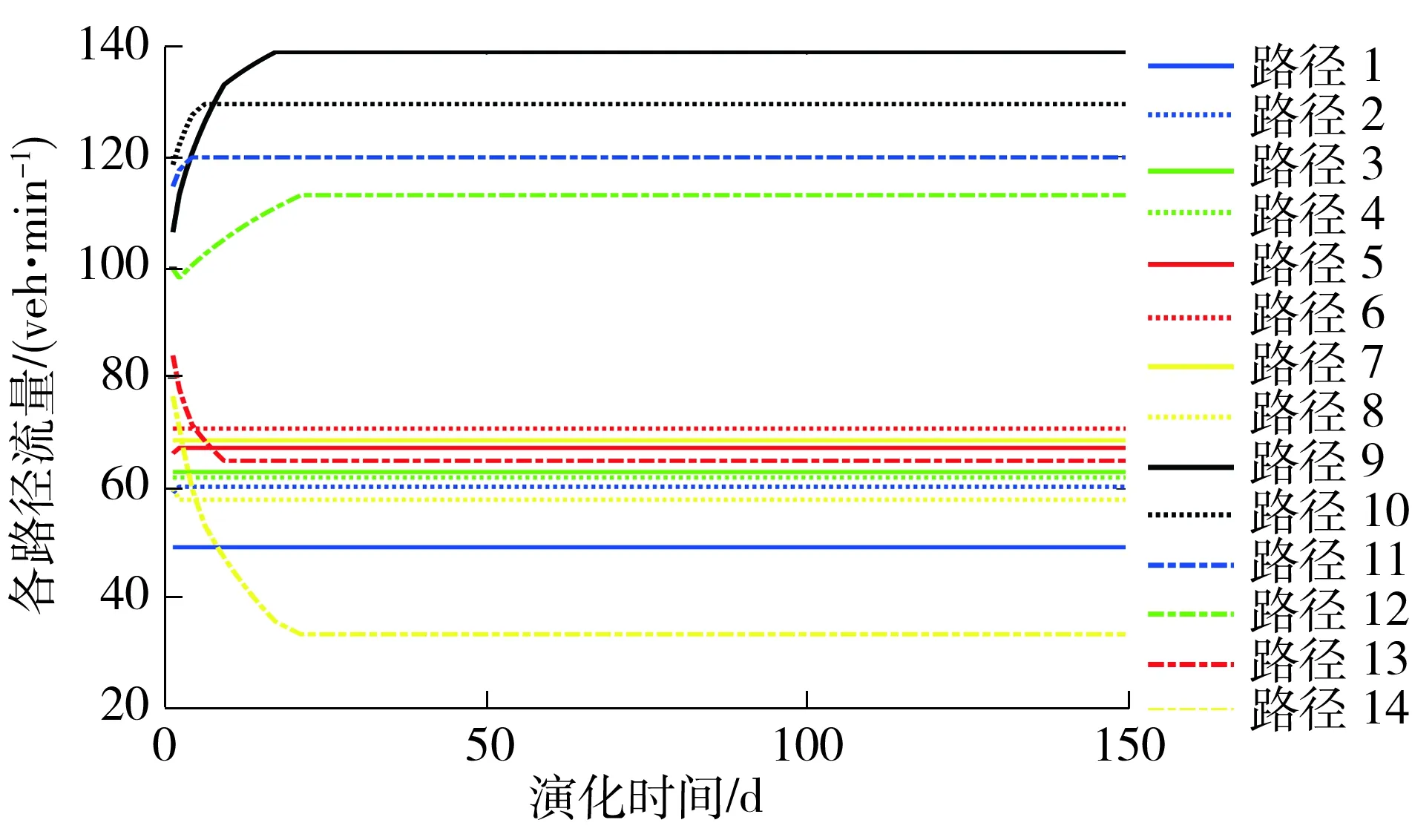
图10 纯传统车辆的各路径流量演化Fig.10 Evolution of pure traditional vehicle flow of each path
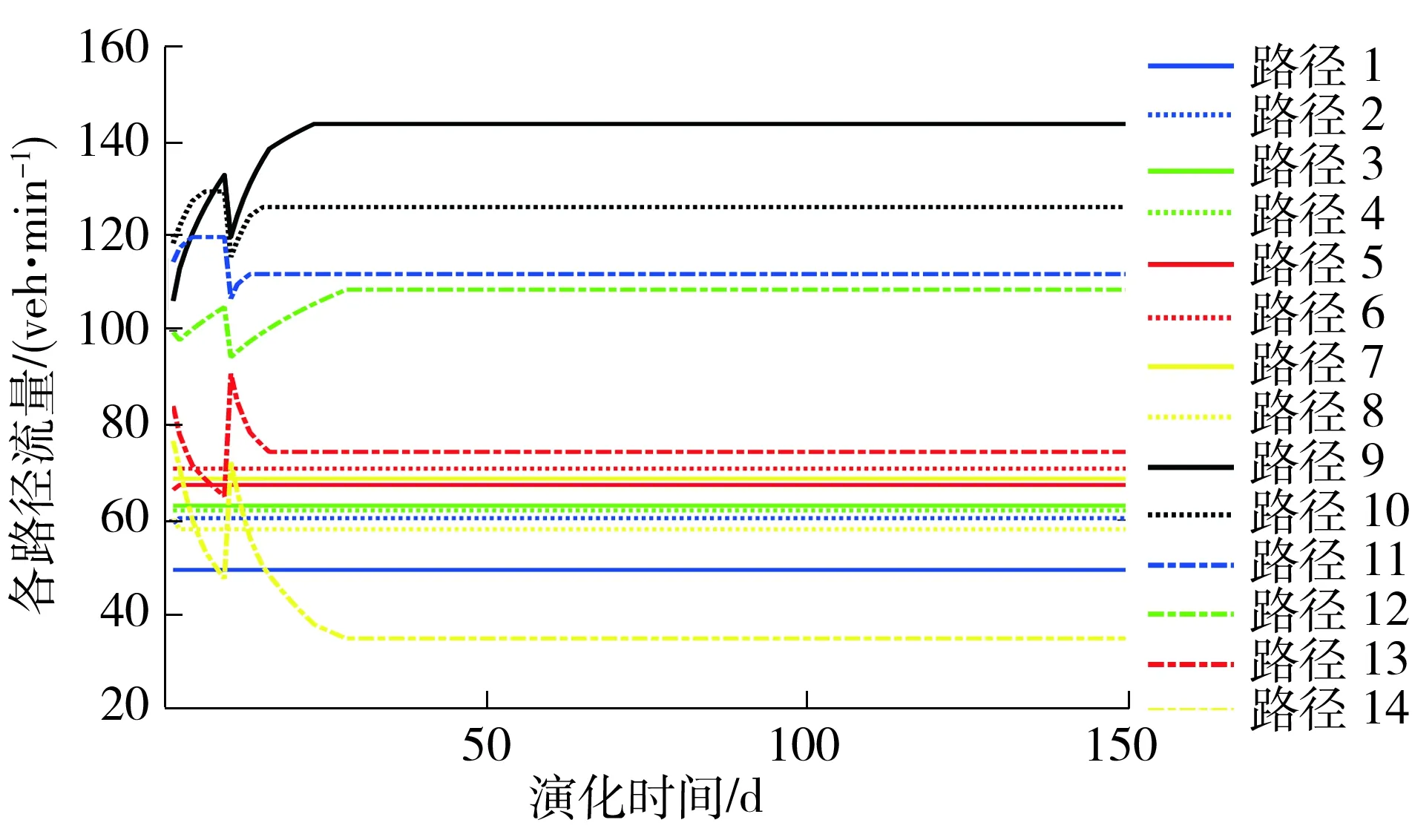
图11 纯传统车辆在短期事件下的各路径流量演化
Fig.11 Evolution of pure traditional vehicle flow of each path in short-term events
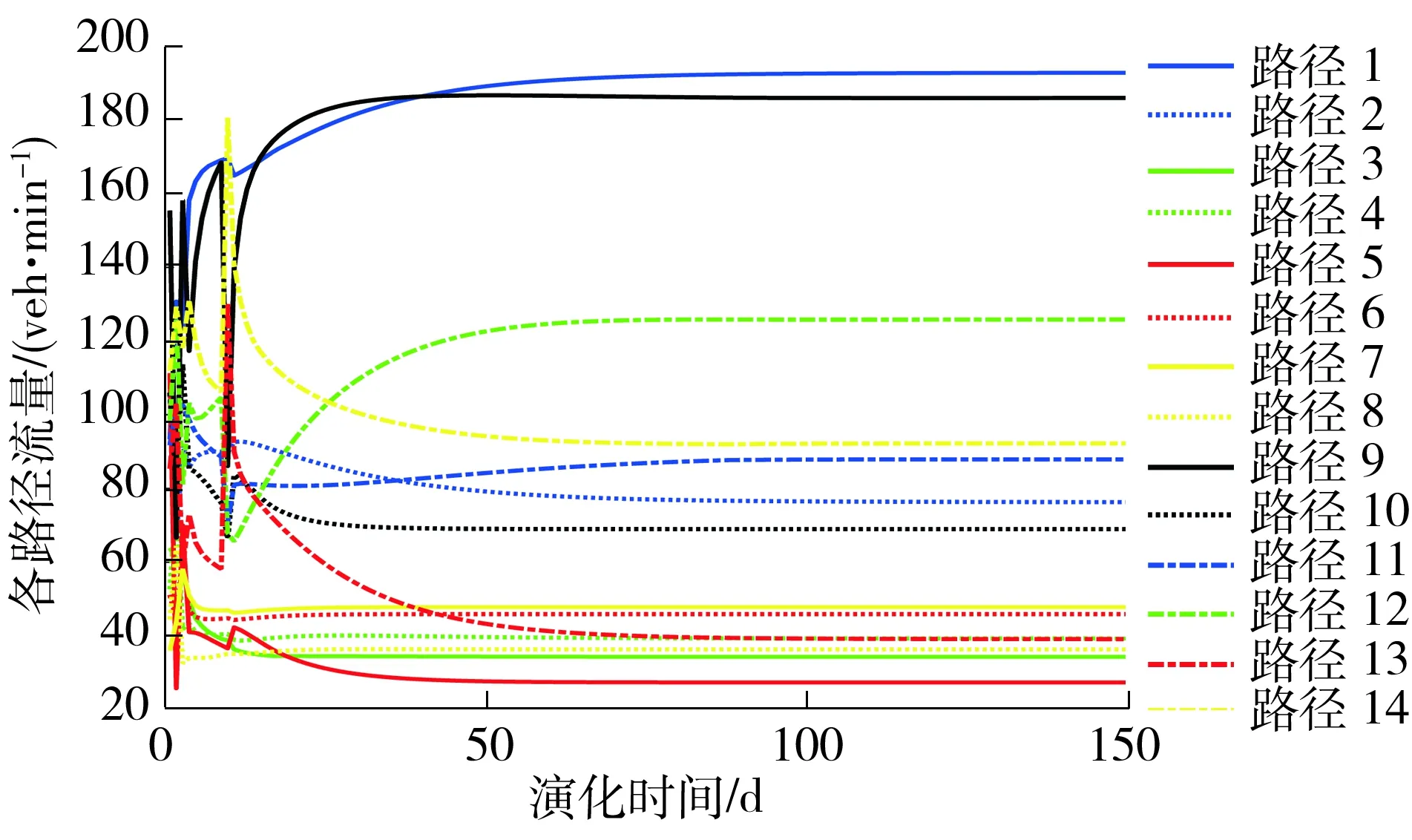
图12 混合流量在短期事件下的各路径流量演化
Fig.12 Evolution of mixed flow of each path in short-term events
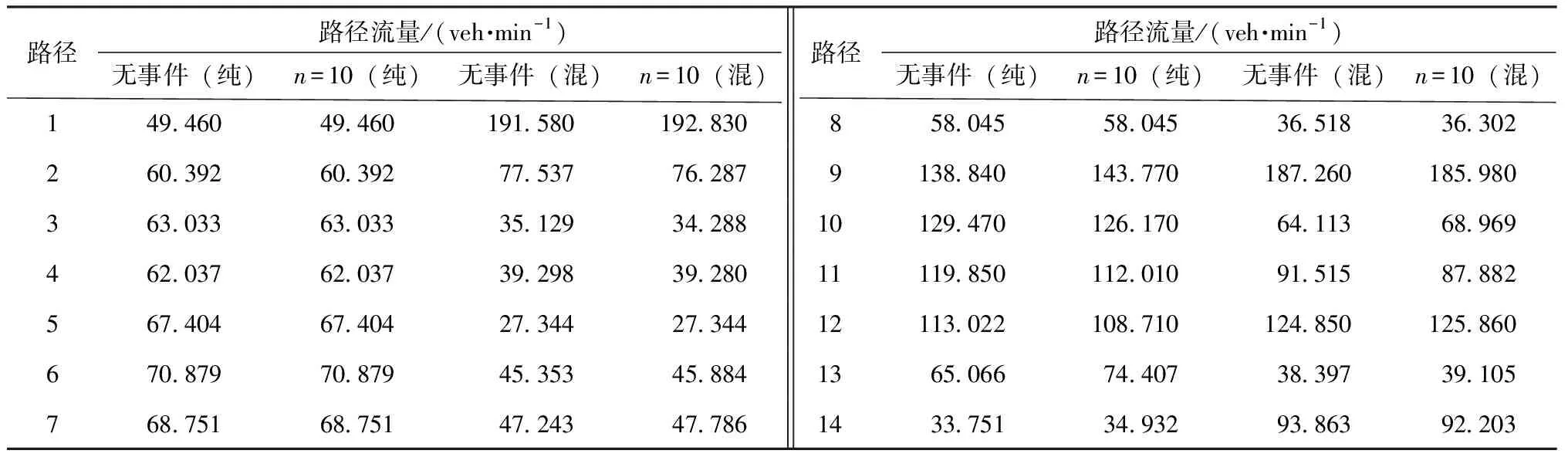
表4 两类出行环境中有、无短期事件时各路径的稳定流量Table 4 Each path’s traffic flow in/non-in short-term events in two types of travel environments
5 结语
文中建立了考虑传统车辆和自动驾驶车辆的混合流量日变模型。在传统车辆流量日变模型中,采用前景理论描述出行者的出行行为,并以路径前景值最大为目标进行传统车辆流量逐日演化;在自动驾驶流量日变模型中,以路径边际阻抗最小为目标进行自动驾驶流量逐日演化。当两类流量逐日演化至各自的均衡状态时,系统流量随之均衡。文中采用一个测试网络模拟了路网混合流量的逐日演化过程,发现两类流量达到均衡所需时间和流量的波动情况均不一致;同时,文中还分析了自动驾驶条件下多类交通情形的流量演化规律。后续工作中,拟考虑弹性需求与日内交通动态对流量演化进行更深入的研究。
