析湿工况下翅片管式换热器表面粉尘沉积过程的数值模型
2020-06-06詹飞龙丁国良庄大伟张浩武滔叶向阳
詹飞龙,丁国良,庄大伟,张浩,武滔,叶向阳
(1 上海交通大学机械与动力工程学院,上海200240; 2 广东美的制冷设备有限公司,广东佛山528311)
引 言
房间空调器用换热器在长期运行过程中表面会积聚大量的粉尘颗粒物[1]。当换热器处于析湿工况时,翅片表面会发生析湿现象[2],大气中的粉尘颗粒物会黏附在翅片表面的冷凝水上而形成湿颗粒物污垢。析湿状态下的粉尘沉积量远大于干燥状态时的沉积量[3],因此会严重影响换热性能。
对于干工况下的颗粒物沉积特性,目前已有较多的实验与建模研究。实验研究涵盖干积灰层的成分[4-5]、不同喷粉工况[6-7]和换热器结构参数对粉尘沉积量的影响[8-9]。建模研究包括基于宏观概率统计的颗粒物沉积概率模型[10-12]、基于理论或实验分析的颗粒物沉积半经验关联式模型[13-15]以及基于颗粒物碰撞理论的颗粒物沉积预测模型[16-18]。
对于析湿工况下的颗粒物沉积特性,目前只进展到实验研究,涵盖换热器表面析湿积灰过程的实现方法、湿颗粒物的分布特性以及湿积灰层对换热器性能的影响[19-21]三个方面,但未有可用的模型。
粉尘颗粒物在湿翅片表面沉积时,冷凝水首先捕集颗粒物并形成湿积灰层,后续颗粒物将继续黏附在湿积灰层上。颗粒物在湿翅片间的运动主要受气流曳力影响[22-23],部分颗粒物运动至冷凝水表面时将立即被捕获,其他颗粒物有可能发生逃逸。因此,模拟冷凝水捕集颗粒物的关键是计算颗粒物的运动轨迹,并判断其是否会传输至冷凝水表面。后续颗粒物与湿积灰层碰撞时,部分入射颗粒物碰撞后既可能沉积在湿积灰层上也可能从湿积灰层上反弹,而被入射颗粒物碰撞的已沉积湿颗粒物既可能从湿积灰层上移除也可能保持静止;影响颗粒物沉积或者移除的主要因素是入射颗粒物的入射状态和湿积灰层的表面状态[24-26]。因此,模拟湿积灰层黏附颗粒物需要分别建立入射颗粒物的沉积判定条件和已沉积湿颗粒物的移除判定条件。
本文的目的是建立析湿工况下翅片表面颗粒物沉积过程的预测模型,用于描述包括颗粒物被冷凝水捕集、湿积灰层黏附颗粒物这两个物理过程在内的湿颗粒物沉积行为。同时,通过开展湿颗粒物在翅片表面沉积的可视化实验来验证模型。
1 建模目标
析湿工况下粉尘颗粒物在翅片表面沉积的过程,是翅片表面析湿后,空气中的粉尘颗粒物运动传输至湿翅片表面被冷凝水捕集以及后续的粉尘颗粒物与湿积灰层碰撞后被黏附的过程,如图1 所示。为了计算湿翅片表面的粉尘颗粒物沉积质量,需要分别计算被冷凝水捕集的粉尘颗粒物数量以及被湿积灰层黏附的颗粒物数量。
由于实际大气中的粉尘颗粒物形状多变,为了便于计算,假设颗粒物的形状为球形,且采用平均粒径来表征颗粒物的尺寸分布。则湿翅片单元上的颗粒物沉积质量可以用式(1)来计算

式中,M(t)是湿翅片上的颗粒物沉积质量,ρp是颗粒物密度,-dp是颗粒物的平均直径,Ndep是湿翅片上的颗粒物沉积总数。
在颗粒物沉积过程的初始阶段,湿翅片上的颗粒物沉积数量Ndep为被冷凝水捕集的颗粒物数量;当冷凝水捕集数量达到最大值时,含尘液滴转化为湿积灰层,后续的颗粒物将继续黏附在湿积灰层上,此时湿翅片上的颗粒物沉积数量Ndep为

式中,Ncap(t)是被冷凝水捕集的颗粒物数量,Ncap_max是冷凝水能够捕集的最大颗粒物数量,Nadh(t)是黏附在湿积灰层上的颗粒物数量。
2 冷凝水捕集颗粒物的模型
2.1 冷凝水捕集的颗粒物数量
当颗粒物运动至冷凝水表面时,颗粒物将被冷凝水捕集,此时颗粒物中心所在位置pp与冷凝水表面轮廓位置pw之间的距离要小于或等于颗粒物的半径,如图2所示。其中,冷凝水表面轮廓位置pw通过湿空气析湿模型[2]计算得到:首先通过该模型计算得到翅片单元表面的冷凝水质量,然后将流场网格中同时含有液相和气相的网格中心坐标标记出来,即可得到冷凝水的表面轮廓位置pw。将满足这一条件的颗粒物数量加起来,就可以得到被冷凝水捕获的颗粒物数量Ncap(t)
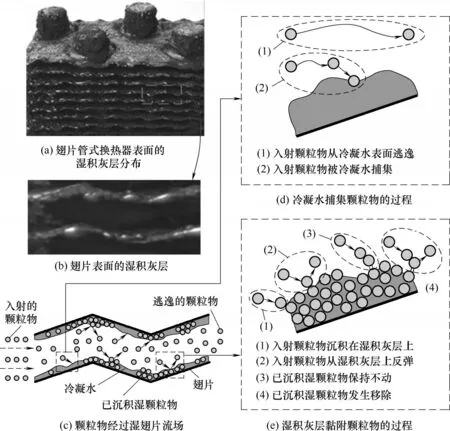
图1 析湿工况下湿翅片表面颗粒物沉积过程示意图Fig.1 Schematic diagram of particle deposition process on wet fin surfaces of heat exchanger under dehumidifying conditions

图2 湿翅片单元上冷凝水捕集颗粒物的示意图Fig.2 Schematic of particle-capturing by condensate water on wet fin cell


颗粒物的位置pp与速度vp之间的关系如式(5)所示。其中,颗粒物速度vp的变化是由颗粒物所受到的气流曳力FD和重力FG所决定的,如式(6)~式(8)所示。其中,式(8)中出现的变量Rep和CD可通过Schiller–Naumann关系式[9]来计算得到。
2.2 冷凝水捕集的最大颗粒物数量
冷凝水捕集的最大颗粒物数量Ncap_max表征的是当湿翅片单元上的冷凝水全部充满颗粒物时所具有的颗粒物数量。为了能近似计算Ncap_max,假设颗粒物规则排列且不发生变形。图3给出了充满颗粒物的冷凝水控制体中的颗粒物堆积方式。该排布下,间隙数与各个间隙内的冷凝水体积之乘积等于未捕获颗粒物的冷凝水体积,如式(9)所示

式中,Ni是颗粒物在规则排列下的所有颗粒物间隙的数量,Vi是单个颗粒物间隙的体积,mw是冷凝水的质量,ρw是冷凝水的密度。
图3 所示的单个间隙结构是由8 个相邻颗粒物相互接触时构成的,将这8 个相邻颗粒物的球心相连可构成一个六面体。其中,该六面体是边长均为-dp的正六面体,其体积如式(10)所示;颗粒物占据的体积为8个1/8颗粒物体积之和,也即一个颗粒物体积,如式(11)所示;间隙体积为正六面体的体积减去颗粒物占据的体积,如式(12)所示。
式中,VH是正六面体的体积,Vo是该正六面体内颗粒物占据的体积。
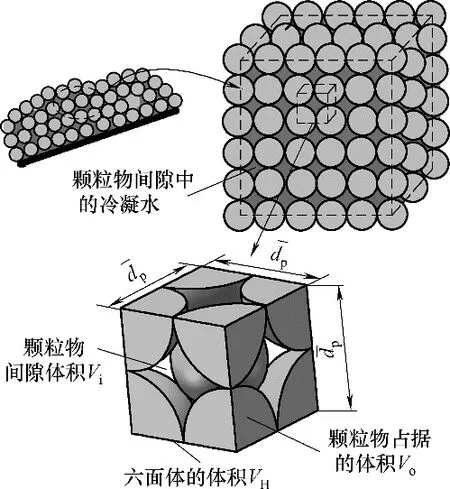
图3 冷凝水控制体中充满颗粒物时的排列方式Fig.3 Schematic diagram of particle arrangement in condensate water
根据上述分析可知,一个数量的颗粒物间隙对应于一个数量的颗粒物。将这种数量对应关系外推到整个充满颗粒物的冷凝水中,可以近似认为所有颗粒物间隙的数量等于冷凝水中的最大颗粒物数量,如式(13)所示

将式(9)~式(12)代入到式(13)中,即可得到Ncap_max的表达式
在式(14)中,冷凝水的质量mw是湿空气与翅片表面之间传质量m1与湿空气与液膜之间的传质量m2之和[2],其计算方法如式(15)~式(17)所示。
3 湿积灰层黏附颗粒物的模型
黏附在湿积灰层上的颗粒物数量等于沉积的入射颗粒物数量减去移除的已沉积湿颗粒物数量,如式(18)所示

式中,Nsti(t)是入射颗粒物的沉积数量,Nrem(t)是已沉积湿颗粒物的移除数量。
3.1 沉积在湿积灰层上的入射颗粒物数量
入射颗粒物与湿积灰层碰撞时发生反弹的原因是:入射颗粒物碰撞前的动能较大,碰撞中扣除能量损耗后,能够大于湿积灰层的表面能,使得该入射颗粒物经碰撞后还剩余有足够的能量转化为动能,从而发生反弹。
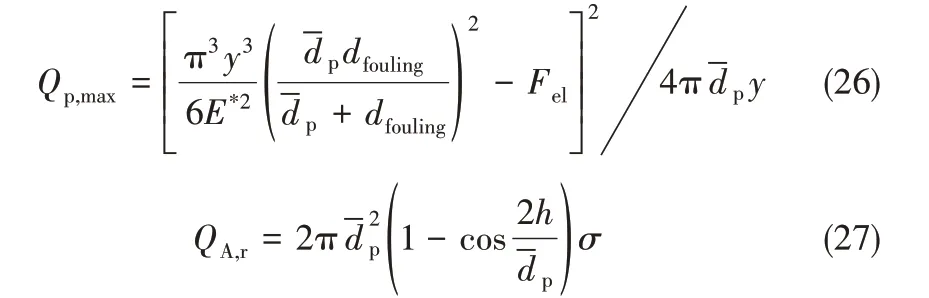
假设颗粒物为弹性体,入射颗粒物与湿积灰层之间的碰撞,可等效为具有质量mp和直径-dp的第一个颗粒物球体与具有无穷大质量和半径的第二个颗粒物球体之间的碰撞[16]。入射颗粒物在碰撞反弹过程中的能量转化与其碰撞形变有关,如图4所示。入射颗粒物首先发生弹性形变,其与接触面相接触的区域为弹性形变区域,部分动能转化为弹性势能。当形变超过弹性极限时,颗粒物会发生塑性形变,弹性形变区域转化为塑性形变区域,直至达到最大形变状态;此时颗粒物的动能会进一步转化为塑性势能,且部分动能会因塑性形变而耗散。随后颗粒物发生形变恢复并从接触面反弹,在脱离接触面时还会受到接触面的黏附阻碍作用;此时颗粒物存储的弹性势能和塑性势能在抵消接触面的表面能后剩余的部分将转化为反弹时的动能。
入射颗粒物在碰撞反弹过程中保持能量守恒。入射颗粒物碰撞前的动能,扣除耗散的能量以及接触面的自由能后,转化为反弹时的动能,其能量守恒方程如式(19)所示

式中,Qi是入射颗粒物的动能,Qp是入射颗粒物发生塑性形变时的耗散的能量,QA,r是湿积灰层的表面能,Qr是颗粒物反弹时的动能。

图4 入射颗粒物碰撞形变示意图Fig.4 Schematic diagram of incident particle deformation
入射颗粒物经碰撞后如果不发生反弹,则颗粒物的反弹动能Qr为零。且在碰撞形变过程中,由于塑性形变区域的极值情况为入射颗粒物与接触面相接触的区域全部转化为塑性形变区域,因此入射颗粒物在塑性形变过程中的耗散能Qp将不大于整个接触区域全为塑性形变区域时的最大耗散能Qp,max。可得到入射颗粒物发生碰撞反弹时所需要满足的能量关系式条件

入射颗粒物碰撞前具有的动能Qi的表达式如式(21)所示。将式(21)代入式(20)中,即可得到入射颗粒物发生沉积时入射颗粒物的碰撞速度vi需要满足的条件如式(22)所示。

将满足式(22)的入射颗粒物全部加起来,就可以得到入射颗粒物的沉积数量Nsti(t),如式(23)、式(24)所示,其中变量vst_cri由式(25)确定,是为了表达方便,依据式(22)所得。

式中,PSj是入射颗粒物沉积的可能性,vst_cri是临界沉积速度。
式(25)中,塑性形变的最大耗散能Qp,max可通过two-body 碰撞理论[16]计算得到,如式(26)所示。湿积灰层的表面能QA,r是由颗粒物与湿积灰层的表面自由能引起的,表征的是接触面间的分子相互扩散作用[26],如式(27)所示。
式中,σ是表面张力,y是临界弹性载荷,E*是等效杨氏模量,dfouling是积灰层曲率半径,Fel是临界弹性载荷下的接触力,h是颗粒物与接触面的距离。
3.2 从湿积灰层上移除的已沉积湿颗粒物数量
已沉积湿颗粒物受到入射颗粒物碰撞时,若受到的力足以使其脱离湿积灰层,则将发生移除。因此判定已沉积湿颗粒物能否从湿积灰层上移除,需要分析来流粒子与被碰撞的已沉积湿颗粒之间的作用力,以及来流粒子速度的定量影响。
单个入射颗粒物与被撞击的已沉积湿颗粒物发生对心碰撞时,入射颗粒物的接触力FC与碰撞过程中的形变有关。图5示出了形变增大的过程:随着形变重叠量δ不断增大,入射颗粒物与已沉积湿颗粒物之间的相对速度Δv不断减小,接触力FC不断增大;当δ达到最大值δmax时,Δv减小为零,此时FC达到最大值FC(δmax)。FC与δ的关系如式(28)所示,由弹性力学中关于两球接触压力的理论[27]得到。入射颗粒物在碰撞形变中满足的动能定理如式(29)所示;碰撞前的速度vi可分解为法向速度vi,n和切向速度vi,t,如式(30)、式(31)所示。将式(28)代入式(29)中,可得δmax的表达式如式(32)所示;再将式(32)代入式(28)中,即可得到FC(δmax)与vi之间的关系式如式(33)所示。
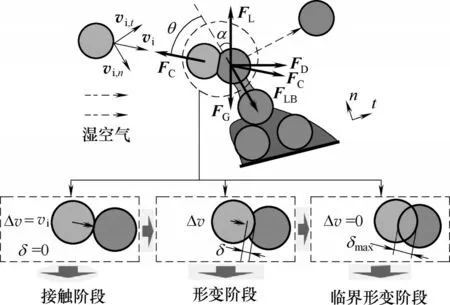
图5 入射颗粒物与已沉积湿颗粒物之间的碰撞过程示意图Fig.5 Impact between incident particle and deposited particle
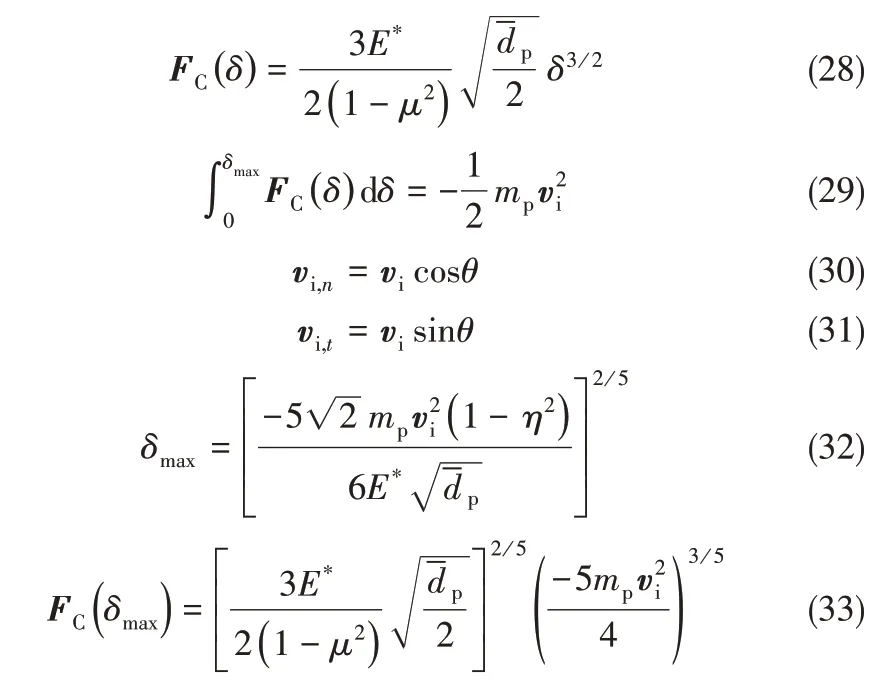
式中,η是泊松系数。
已沉积湿颗粒移除判定条件为,只要在法向或切向方向上该颗粒物受到的最大接触力大于其他作用力的合力,即满足式(34)或式(35)中的一个。

式中,FL是升力、FLB是液桥力、FD是曳力、FG是重力,θ是入射颗粒物碰撞角,α是翅片倾斜角。
将式(30)和式(33)代入式(34)中,并将式(31)和式(33)代入式(35)中,可得到当已沉积湿颗粒物发生移除时,入射颗粒物的法向和切向碰撞速度需要满足的条件,如式(36)、式(37)所示。

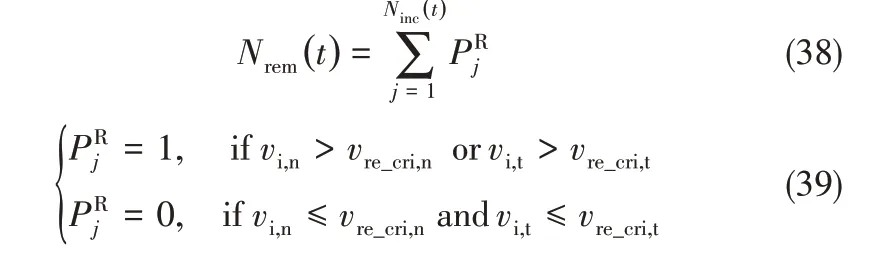
将满足式(36)或式(37)的入射颗粒物的数量全部加起来,此数量即为已沉积湿颗粒物的移除量Nrem(t),如式(38)和式(39)所示。其中变量vre_cri,n和vre_cri,t由式(40)和式(41)确定,是为了表达方便,依据式(36)和式(37)所得。

式(40)、式(41)中,升力FL由积灰层内部流动滞止区的速度梯度引起[28],如式(42)所示。液桥力FLB由湿颗粒间液桥的吸引作用引起[29],如式(43)所示。气流曳力FD需要将近湿积灰层表面的气流速度分布的影响考虑在内[30],如式(44)所示。
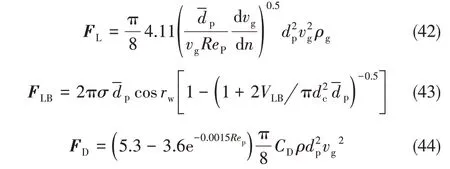
式中,rw是颗粒物润湿半径,由湿积灰层中的含湿量决定;dc是被液桥连接的相邻颗粒物之间的距离;VLB是液桥体积。
4 实验验证及结果分析
4.1 实验台与样件
模型验证在已有的实验台上进行,该实验台包括湿空气发生系统、粉尘喷射系统、可视化测试段以及称重系统[20]。通过该可视化实验台可以拍摄换热器翅片表面湿积灰层的形貌分布特征并测量得到换热器翅片表面湿积灰层的质量。
换热器样件选取为波纹翅片管式换热器测试样件,具体结构参数如表1所示。
换热器表面湿积灰层的质量可通过计算换热器样件积尘前后的质量变化得到,其计算公式为
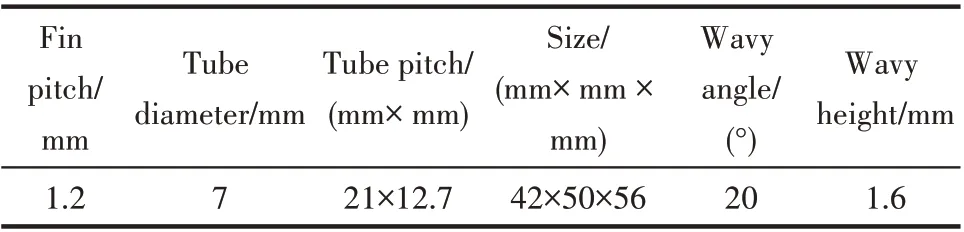
表1 测试样件结构参数Table 1 Geometric details of test sample

式中,R是换热器样件表面的单位面积湿积灰层质量,mbefore是积尘前的换热器质量,mafter是积尘后的换热器质量,Aair是换热器的空气侧面积。
4.2 模型验证
选取与实验测试样件具有一致结构参数的波纹翅片管换热器作为模拟对象,并将本文模型嵌入到FLUENT 软件中进行模拟。模拟中的边界条件设置为:进口面为气流速度入口并设置为颗粒物喷射口;出口面设置为压力出口边界。模拟中的模型设置情况为:采用RNGk-ε模型来模拟湿翅片间的流场;采用多组分模型来设置湿空气的相对湿度;采用曳力模型来计算颗粒物的运动轨迹;冷凝水捕集颗粒物的模型以及湿积灰层黏附颗粒物的模型则分别以用户自定义函数(UDF)形式导入到翅片边界条件上;颗粒物沉积质量的计算则是通过修改宏函数DEFINE_DPM_EROSION来实现。
采用的模拟工况和实验工况参数涵盖相对湿度为RH = 50%~90%、气流入口速度为vg= 0.5~3.5 m·s-1、颗粒物浓度为c= 2.1~10.8 g·m-3以及颗粒物喷射时间为0~10 min。模拟过程中对于相对湿度参数的设置是通过设置多组分模型中的入口水气组分占比来实现的;对于颗粒物浓度参数的设置是通过设置颗粒物喷射入口边界条件中的颗粒物质量流量来实现的。颗粒物的属性选为主要成分为SiO2的粉尘颗粒物[5],具体的物性参数如表2所示。
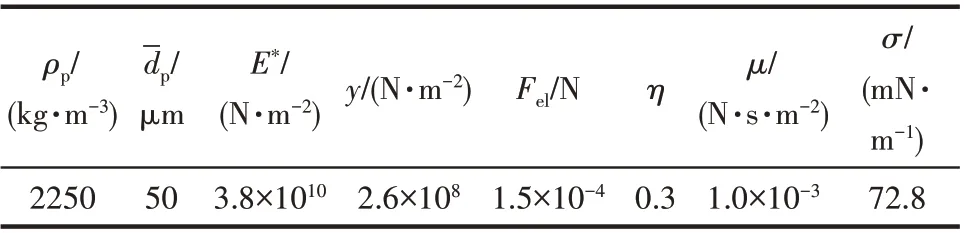
表2 颗粒物及液膜的物性参数Table 2 Physical properties of particle and liquid film
对模拟中的网格无关性进行了验证。对于边界层网格,取第一层网格大小为0.001 mm,网格层数为6 层,网格生长率为1.2,可充分反映翅片表面冷凝水和湿积灰层的生长。对于流场网格,依次选取了0.3、0.2、0.08 和0.06 mm 这四种网格大小来计算流场中的平均Darcy摩擦因子[14];结果表明当流场网格大小由0.08 mm 减小为0.06 mm 时,平均Darcy摩擦因子的变化幅度小于1%,故选取流场网格大小为0.08 mm。
图6给出了预测的翅片表面湿积灰层分布结果与实验结果之间的比较,可知在三个不同时刻下模拟结果与实验结果之间的吻合度较好。图7 给出了预测的单位面积颗粒物沉积质量R与实验结果之间的定量对比,可以看出本模型预测的单位面积颗粒物沉积质量与91%的实验数据之间的误差在±20%之间,平均误差为11.8%。上述模拟结果与实验结果之间的对比表明,本文所开发的模型能够用于预测析湿工况下翅片表面的颗粒物沉积过程,模型精度的适用范围涵盖相对湿度RH =50%~90%、气流入口速度vg=0.5~3.5 m·s-1、颗粒物浓度c= 2.1~10.8 g·m-3以及颗粒物喷射时间0~10 min。
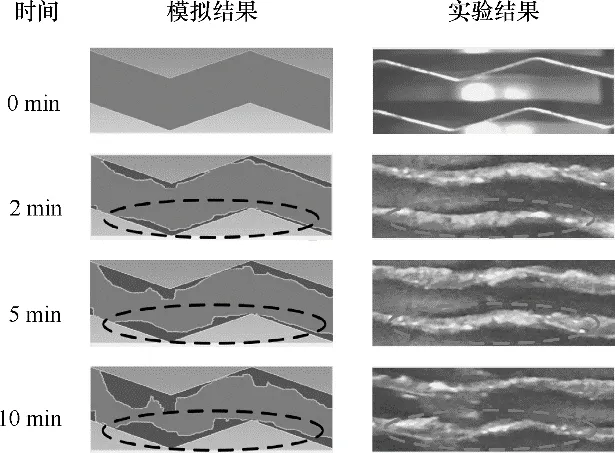
图6 预测的湿积灰层形状与实验结果的对比Fig.6 Comparison of predicted shape of wet particulate layer and experimental images at different time
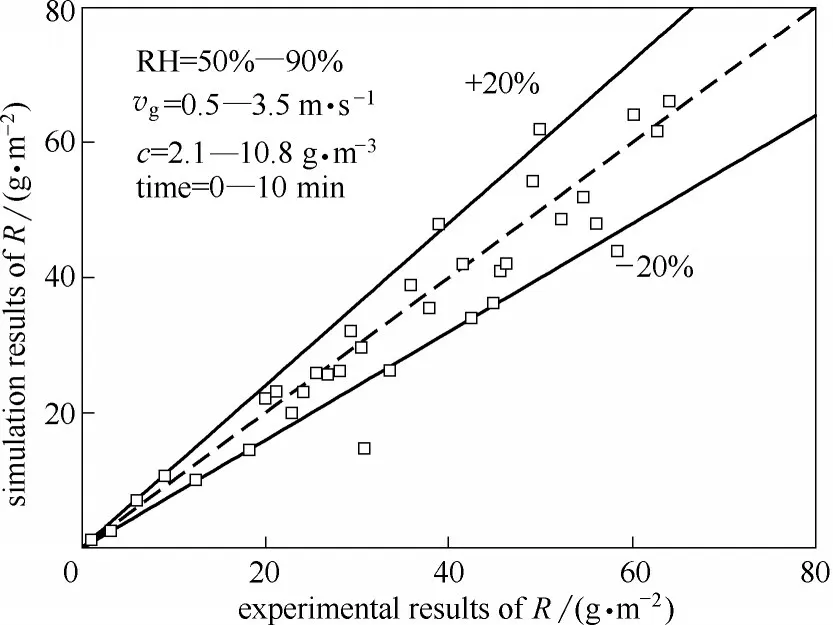
图7 单位面积颗粒物沉积质量的预测结果与实验结果对比Fig.7 Comparisons of deposited particle mass per unit area between predicted and experimental results
5 结 论
(1)湿翅片表面的颗粒物沉积过程包括冷凝水捕集颗粒物以及湿积灰层黏附颗粒物;通过统计被冷凝水捕集和被湿积灰层黏附的颗粒物数量,可计算得到湿翅片上颗粒物沉积质量。
(2)被冷凝水捕集的颗粒物数量可通过统计运动轨迹与冷凝水表面轮廓相交的入射颗粒物的数量来得到;入射颗粒物的运动轨迹由湿翅片间的曳力决定,可通过建立颗粒物运动方程来计算。
(3)被湿积灰层黏附的颗粒物数量等于碰撞后发生沉积的入射颗粒物数量减去经碰撞后发生移除的已沉积湿颗粒物数量,由入射颗粒物沉积判定条件和已沉积湿颗粒物移除判定条件得到。
(4)将湿的波纹翅片上的颗粒物沉积过程数值模拟结果与实验数据进行了对比,结果显示预测的湿积灰层形状与实验照片之间的吻合度较好,预测的单位面积颗粒物沉积质量与91%的实验数据之间的误差在±20%之间,平均误差为11.8%。
符 号 说 明
dfouling——积灰层的曲率半径,m
E*——等效杨氏模量,N·m-2
Fel——颗粒物在临界弹性载荷下的接触力,N
h——颗粒物中心点与接触面之间的距离,m
M——颗粒物沉积质量,kg
mw——冷凝水的质量,kg
Nadh——黏附在湿积灰层上的颗粒物数量
Ncap——被冷凝水捕集的颗粒物数量
Ncap_max——冷凝水能够捕集的最大颗粒物数量
Ndep——湿翅片上的颗粒物沉积总数
QA,r——湿积灰层的表面能,J
Qi——入射颗粒物的动能,J
Qp——入射颗粒物塑性形变时的耗散能,J
Qp,max——颗粒物塑性形变的最大耗散能,J
Qr——颗粒物反弹时的动能,J
y——临界弹性载荷,N·m-2
η——泊松系数
ρp——颗粒物密度,kg·m-3
ρw——冷凝水的密度,kg·m-3
σ——液膜的表面张力,mN·m-1
