多波束和三维声呐技术在码头工程中的应用实例
2020-05-26谭博珍
谭博珍


摘 要:使用多波束和三维声呐测量技术对某码头工程基床前肩构造及沉箱安放的施工效果进行检测,将水下隐蔽工程图像化,直观地反应隐蔽工程的全貌,为隐蔽工程的检验与缺陷的修护提供依据和可视化的资料。
关键词:多波束;三维声呐;检测
1引言
在码头工程中,多波束测量技术扫测精度较高,能直观、准确地判断海床面的地形情况,是航道、港池、基床施工后重要检测手段。三维声呐系统水下目视检测是利用目力、水下照相或录像进行检测的方法[1,2],该方法能在含沙量大、能见度低、水下地形复杂的环境中,通过三维图像清晰反映水工结构真实场景。本文以工程实例,结合多波束和三维声呐成像两者技术的结合,通过检测手段,可视化施工效果,利于码头水下结构的质量检查和修复。
2工程概况
厦门港古雷港区某泊位工程位于古雷半岛西侧东山湾湾口东侧,码头长349m,15万吨级通用泊位。码头基床顶标高为-19.50m,结构采用连片式方沉箱结构(共18个沉箱),沉箱尺寸为长18.75m×宽19.1m×高22.2m,趾长1.0m。沉箱安装完后,因外部环境影响,工程停工长达1年,且码头前沿栅栏板尚未安装。复工前,采用多波束和三维声呐测量技术对基床前肩、沉箱安装质量检查,为后续施工或缺陷修复提供依据。沉箱安装平面图见图1所示。
3工作原理
3.1 多波束扫测
水深扫测采用美国Trimble SPS461信标机进行动态定位,配合SeaBat T50-P宽带多波束测深系统进行数据采集,同时将自动采集的数据储存在计算机中。在水深扫测的同时,设立临时潮位站进行人工同步潮位观测,用于多波束后处理数据的潮位改正,水深扫测全覆盖测量范围。
系统包括SeaBat T50-P处理器;接收/发射换能器;数据采集计算机;OCTANS光纤罗经运动传感器;HY1200声速剖面仪;SPS461接收器;专用安装支架;PDS2000导航、数据采集软件;Carise Hips数据处理软件。多波束系统构成示意图如图2所示;现场测量图见图3所示。
3.2 三维声呐系统
水下三维声呐系统(BV5000)首先通过声呐头发射一个频率1.35MHZ的脉冲信号,形成一个45°*1°的扇形扫描区域,每个脉冲包含256个声学波束,以相同间隔排列在垂直方向上,即每个波束的间距为0.178°,系统接收到目标物反射的信号后,结合波束形成、波束指向、振幅及相位检测等技术,得到扇形区域256个点与换能器的位置信息,生成1个2D图像,再通过计算机控制云台在水平方向上360°旋转,实现检测目标物不同部位的位置信息,最终形成3D图像。
系统设备包括声呐头、云台、接线盒及数据传输电缆等。系统构成示意图如图4所示,现场测量图见图5所示。
4检测内容
4.1基床前肩
检查暗基床宽度、标高与坡度情况,即前肩宽度是否满足规范要求,是否存在局部超高或欠抛。
4.2沉箱安装
检查沉箱接缝宽度以及安装过程碰损情况。定性分析沉箱接缝破损情况,对于较大接缝进行定量分析,对明顯的异常情况进行排查。
5数据分析
5.1沉箱安装
5.1.1沉箱安装接缝
沉箱接缝宽度自北向南进行编号,共18个接缝。对BV5000获得的数据进行分析,并与实际量测尺寸比对。沉箱设计高度为22.2m,按《水运工程验收标准》,沉箱高度超过10m,允许最大接缝宽度应为8H/1000=177.6mm。
根据比对数据,有16个合格,合格率89%,沉箱接缝宽度分析见表1。另外,9#接缝相邻沉箱错位明显,错位约20cm。
选取8#沉箱安装后接缝宽度,上部用直尺实际量测,水下用三维声呐系统生成的3D结构图像化,能准确反映沉箱安装质量。从8#沉箱安装数据分析,基床未夯实而发生不均匀沉降,导致沉箱之间的缝宽超出设计和规范允许偏差。对沉箱缝宽不合格的情况,在后续后沿棱体抛石需特殊处理。 实测与三维声呐数据对比见图6所示。
5.1.2沉箱前趾
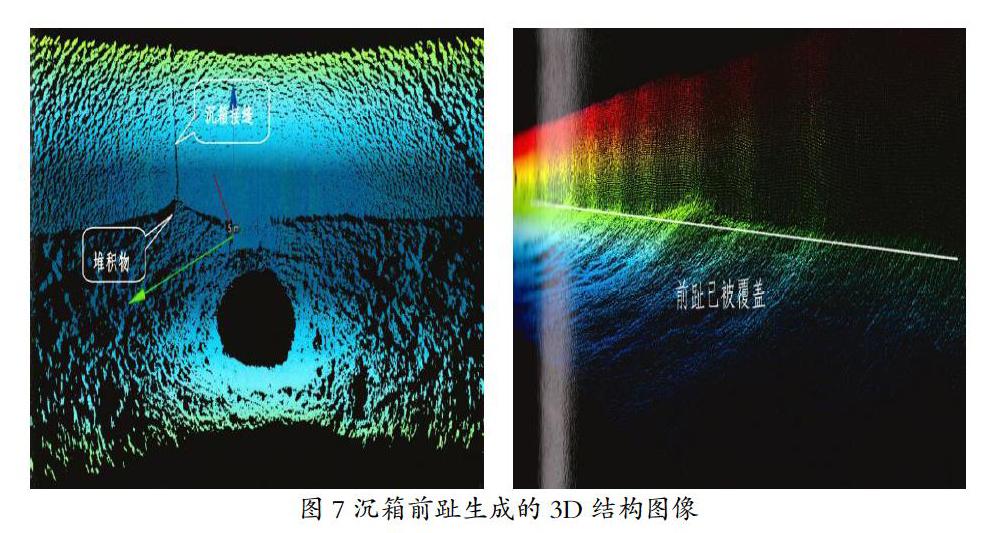
沉箱前趾在三维声呐系统生成的3D结构图像能清晰的反映出沉箱前趾大量堆积物,整个前趾已被覆盖,无法对其施工效果进行定性定量分析,待清淤后重新扫测。沉箱前趾生成的3D结构图像见图7所示。
5.2基床前肩
多波束扫测后,经数据处理分析能反映基床前肩淤积大量的淤泥,无法准确量取宽度、高程,必须清理淤泥后重新扫测。不过通过对比实测断面和设计断面,未发现欠抛现象。基床前肩多波束扫测图见图8所示。
6结论
(1)三维声呐系统(BV5000)精度高、成像清晰,且通过可视化直观反映水下结构状况,为水下结构质量检查和缺陷修复提供重要的技术手段。
(2)SeaBat T50-P多波束测量技术能高精度、全覆盖,准确测量出水下地形地貌,数据处理分析与三维声呐系统成像结果基本吻合。
(3)本次测量中,三维声呐系统仍然存在不足,受环境因素、水流因素、操作方法或设备自身缺陷,对于微小缺陷不能直观反映。但它借助三维显示技术,可提供水下目标外形轮廓的更多细节描述,是目前水下细部结构检测比较先进的手段[3,4]。
参考文献:
[1] 程志虎.水无损检测技术综述下[J]. 无损检测, 1997, 19(9):266-269.
[2] 张剑波.水下结构物检测与维修技术概论[M]. 北京:石油工业出版社,2009.
[3] 戴林军,郝晓伟,吴静,等.基于三维成像声呐技术的水下结构探测新方法[J]. 浙江水利科技, 2013, (3):62-65.
[4] 时振伟,刘翔,张建峰,等.三维成像声呐BV5000在水下测绘领域中的应用[J]. 气象水文海洋仪器,2013(3):48-52.
